Please log in to read this in our online viewer!
Please log in to read this in our online viewer!
No comments yet. You can be the first!
What did others read after this?





Content extract
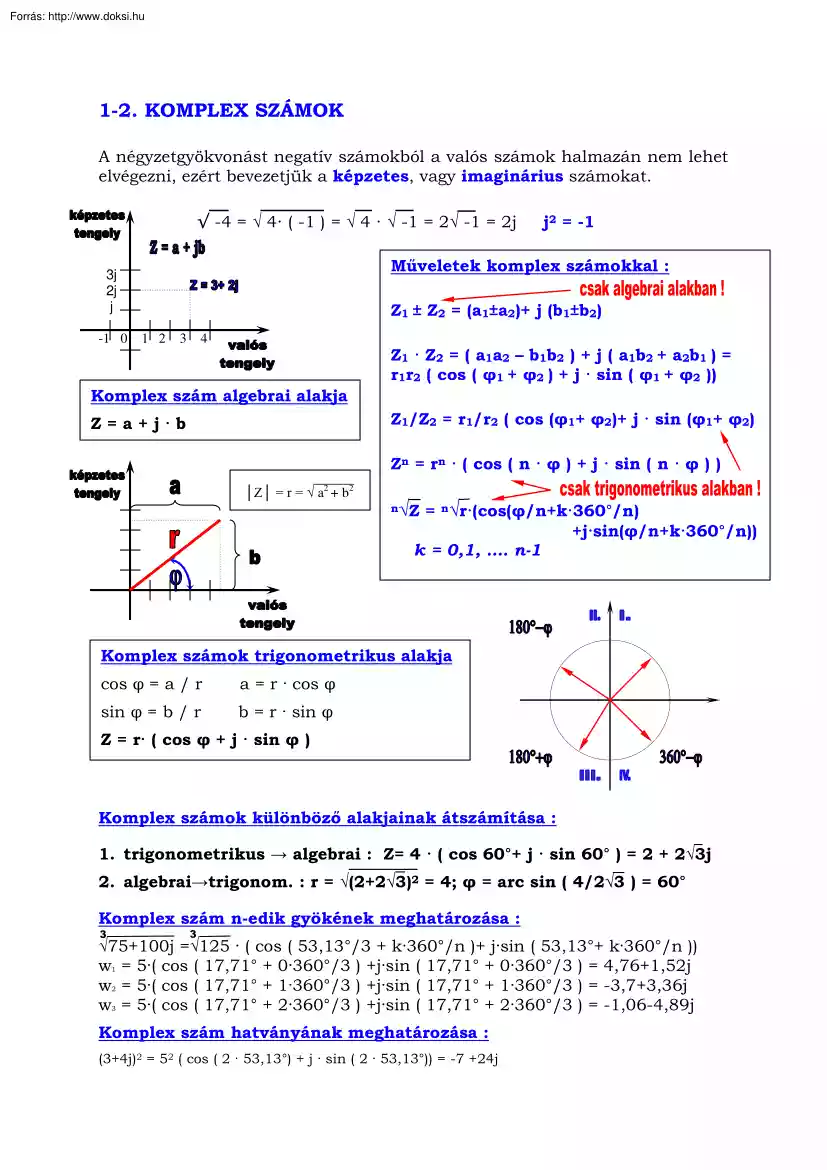
1-2. KOMPLEX SZÁMOK A négyzetgyökvonást negatív számokból a valós számok halmazán nem lehet elvégezni, ezért bevezetjük a képzetes, vagy imaginárius számokat. √ -4 = √ 4∙ ( -1 ) = √ 4 ∙ √ -1 = 2√ -1 = 2j Műveletek komplex számokkal : 3j 2j j -1 0 j2 = -1 Z1 ± Z2 = (a1±a2)+ j (b1±b2) 1 2 3 4 Komplex szám algebrai alakja Z=a+j·b Z1 · Z2 = ( a1a2 – b1b2 ) + j ( a1b2 + a2b1 ) = r1r2 ( cos ( φ1 + φ2 ) + j · sin ( φ1 + φ2 )) Z1/Z2 = r1/r2 ( cos (φ1+ φ2)+ j · sin (φ1+ φ2) Zn = rn · ( cos ( n · φ ) + j · sin ( n · φ ) ) │Z│ = r = √ a2 + b2 n √Z = n√r·(cos(φ/n+k·360°/n) k = 0,1, . n-1 +j·sin(φ/n+k·360°/n)) Komplex számok trigonometrikus alakja cos φ = a / r a = r · cos φ sin φ = b / r b = r · sin φ Z = r· ( cos φ + j · sin φ ) Komplex számok különböző alakjainak átszámítása : 1. trigonometrikus algebrai : Z= 4 · ( cos 60°+ j · sin 60° ) = 2 + 2√3j 2. algebraitrigonom : r =
√(2+2√3)2 = 4; φ = arc sin ( 4/2√3 ) = 60° Komplex szám n-edik gyökének meghatározása : √75+100j =√125 · ( cos ( 53,13°/3 + k·360°/n )+ j·sin ( 53,13°+ k·360°/n )) w1 = 5·( cos ( 17,71° + 0·360°/3 ) +j·sin ( 17,71° + 0·360°/3 ) = 4,76+1,52j w2 = 5·( cos ( 17,71° + 1·360°/3 ) +j·sin ( 17,71° + 1·360°/3 ) = -3,7+3,36j w3 = 5·( cos ( 17,71° + 2·360°/3 ) +j·sin ( 17,71° + 2·360°/3 ) = -1,06-4,89j Komplex szám hatványának meghatározása : (3+4j)2 = 52 ( cos ( 2 · 53,13°) + j · sin ( 2 · 53,13°)) = -7 +24j 3+5. ELEMI ALAPFÜGGVÉNYEK x A függvény két halmaz egyértelmű hozzárendelése. f(x) Df Rf x f(x) = a , ha a > 1 Lineáris függvény f(x) = xa Hatványfüggvény Exponenciális függvény LLooggaarriittm mu ussffüüggggvvéén nyy f(x) = ax + b fff(((xxx))) = = llooggaaa xx,, hhaa aa >> 11 f(x) = ax , ha a < 1 ff(((xxx))) == llooggaaa xx,, hhaa aa << 11 Függvénytani tulajdonságok : 1.
zérushely Az x tengellyel közös pont. F(x) = 0 2. monotonitás Négy lehetősége : szig. mon növekvő f(x1)<f (x2), növekvő f(x1)≤f (x2), szig mon csökk. f(x1)>f (x2), csökkenő f(x1) ≥f (x2) 3. szélsőérték Abszolút maximum, absz. minimum, lokális maximum, lokális minimum 4. paritás ( párosság ) A páros fgv.-ek az y tg-re, a páratlanok az origóra szimmetrikusak 5. periodicitás A fgv. akkor periodikus, ha f(x) = f(x+P) Az abszolútérték a függvényekben f(x) =│x2-4x-5│ f(x) =│x│ -1 5 f(x) = x2-4x-5 A másodfokú fgv. zérushelyei közötti szakaszán az x tengelyre tükrözve veszi fel az értékét. 4. TRIGONOMETRIKUS FÜGGVÉNYEK ÉS INVERZEIK ≤ sin x ≤ 1 1. Sinus függvény -1 per. : 2π 1 -π -π/2 2. Cosinus függvény Df : R Rf : [ -1; 1 ] π/2 π 3π/2 1 -π -π/2 -1 π/2 π 3π/2 -1 3. Tangens függvény 4. Cotangens függvény sinx tgx = cosx -π/2 -1 ≤ cos x ≤ 1 per. : 2π Df : R Rf : [ -1; 1 ] π/2
π 3π/2 -π/2 per. : π Df : R[ π/2+k· π ] Rf : R 5. Sinus hiperbolikus függvény shx = cosx ctgx= sinx ex-e-x 2 7. Tangens hiperbolikus függvény thx = shx / chx π/2 per. : π Df : R[ k· π ] Rf : R 6. Cosinus hiperbolikus függvény chx = ex+e-x 2 8. Cotangens hiperbolikus fgv cthx = chx / shx 9. Az inverzfüggvények ( arc sin x, arc cos x, arc tg x, arc ctg x ) Inverz függvények esetében a hozzárendelés csak kölcsönösen egyértelmű lehet. f-1 arc sin x = 1 / sin x arc cos x = 1 / cos x f -1 arc tg x = 1 / tg x f f arc ctg x = 1 / ctg x f f-1 6. FÜGGVÉNY HATÁRÉRTÉKE, ESETEI 1. Végtelenben vett véges határérték lim f (x) = A x↦± ∞ 2. Végtelenben vett végtelen határérték -∞-ben vett +∞ +∞-ben vett +∞ -∞-ben vett -∞ +∞-ben vett -∞ lim f (x) =± ∞ x↦± ∞ 3. Véges helyen vett végtelen határérték lim f (x) =± ∞ x↦a véges helyen vett -∞ véges helyen vett +∞ Nevezetes határértékek 1
=0 lim n lim 12 = 0 n lim x↦0 Sd 1 lim 1+ n [ sin x =0 x a n= ea = e lim 1+ n n ] [ ] 7. DIFFERENCIA- ÉS DIFFERENCIÁLHÁNYADOS FOGALMA f(x)- f(a) f(a) x-a f(x) A differenciahányados a függvénygörbe egy szelőjének meredekségét adja meg. tg α = f(x)- f(a) =m x-a Ha a differenciahányadosnak az a helyen létezik véges határértéke, akkor ezt a határértéket nevezzük az f függvény a helyhez tartozó differenciálhányadosának. A differenciálhányados a görbe érintőjének meredekségét adja lim x↦a f(x)- f(a) = f ’(a) x-a Ha egy függvény értelmezési tartományának valamely részhalmazának minden pontjában differenciálható, akkor azt mondjuk, hogy a függvény differenciálható ezen a halmazon, és az intervallum pontjaihoz rendelt differenciálhányadosokat az f függvény differenciálhányados függvényének, röviden deriváltjának nevezzük. Függvénygörbe adott pontjának érintője egyenletének meghatározása : P (
x0; y0 ) y – y0 = m ( x - x0 ) y = x2 – 4 , P ( 2; 0 ) me = f’(2) f’(x) = 2x m=4 az egyenlet : y – 0 = 4 ( x – 2 ) vagyis y = 4x – 8 8. DERIVÁLÁSI SZABÁLYOK ALAPFGV-EK DERIVÁLTJAI ( f ∓ g )’ = f’ ∓ g’ ( )= 1 ’ g ( c · f )’ = c · f’ -g’ g2 f ’ g ( )= ( f · g )’ = f’ · g + f · g’ f’ · g – f · g’ g a 2 (n√xa)’= (x n)’= n · xn-1 (xn)’ = n · xn-1 (ax)’ = ax·ln a (ex)’ = a·ex (sin x)’ = cos x (cos x)’ = - sin x [f(g(x))]’ = f’(g)·g’(x) ( 1/x )’ = -1/x2 ( loga x )’ = 1/(x·ln a) (ctg x)’ = 1/sin2 x = 1+ctg2 x (tg x)’ =1/cos2 x = 1+tg2 x (sh x)’ = ch x (ch x)’ = sh x 9. MONOTONITÁS ÉS SZÉLSŐÉRTÉK VIZSGÁLATA A monotonitás vizsgálatához a derivált előjelének ismerete szükséges. A 2x+2 függvény monotonitási vizsgálatának lépései : x2+3 1. a függvény deriválása x x<-3 -3<x<1 x>1 f’ - + - f csökken nő csökken 2. mivel
a nevező értéke mindenképpen pozitív ( x2+3 )2, ezért a számlálónak kell az előjelét vizsgálni 3. a számlálóban a –2x2-4x+6 egyenlőség marad a deriválás után, ezt kell 0-val egyenlővé tenni, s így keresni a gyökeit, ahol f(x)’<0, ott a függvény csökkenő, ahol f(x)’>0, ott a függvény növekvő 4. az egyenlet gyökei x1=-3, x2=1; ezek között a függvény növekszik, a -3-nál kisebb és a 1-nél nagyobb értékeken csökken A szélsőérték helyhez a deriváltnak előjelet kell váltania. A szélsőérték jellegének meghatározásához a második derivált előjelét kell ismerni Ahol az első derivált értéke 0, és van előjelváltás és f(x)’’<0, ott a függvénynek maximuma van, ahol f(x)’’ >0, ott a függvénynek minimuma van y = 2x3-3x2+6 x x<0 x=0 0<x<1 x=1 x>1 D f’ + 0 0 + f nő maximum csökken minimum nő 10. KONVEXITÁS VIZSGÁLATA A második derivált előjele adja meg a konvexitás
kérdésére a választ. Ahol f(x)’’<0, ott a függvény konkáv, ahol f(x)’’ >0, ott a függvény konvex. Az inflexiós hely ott van, ahol f(x)’’ =0. y = x3-x2-x Az első derivált : 3x2-2x-1, x1=1; x2= -1/3 ezeknél az értékeknél van szélsőérték, az x1nél minimum, x2-nél maximum A második derivált : 6x-2 x=1/3 ennél az értéknél van inflexiós hely x x<-1/3 x=-1/3 -1/3<x<1/3 x=1/3 1/3<x<1 x=1 x>1 f(x)’ + 0 - - - 0 + f(x)’’ - konkáv max. - 0 + + konvex min. + f(x) nő infl. hely csökken 11. A FÜGGVÉNYVIZSGÁLAT LÉPÉSEI x2+1 x 1. Értelmezési tartomány meghatározása ( ha nem adott ) Df = R ( 0 ) 2. Zérushely meghatározása ( f(x) = 0 ) Nincs zérushelye, sohasem 0. 3. Határértékek meghatározása az értelmezési tartomány határainál ( + és - ∞, valamint a „lyukaknál” mindkét oldalon ). x2+1 x2+1 lim = +/-∞ lim x↦ ∞ x x = +/-∞ ( az első határértéknél
L’Hospital ! ) x↦ 0 +/- +/- 4. Monotonitás és szélsőérték meghatározása ( f(x)’= 0 ) f’(x) : x2-1/x2, a nevező mindenképpen pozitív, vagyis x2=1, x1= 1, x2=-1 5. Konvexitás, inflexiós hely meghatározása ( f(x)’’= 0 ) f’’(x) : 2/x3, ez nem lehet 0, tehát nincs inflexiós hely 6. Táblázatkészítés 7. Grafikon megrajzolása 2 8. Értékkészlet megállapítása Rf : R ⌉ -2, 2 ⌊ -2 nő 12. A HATÁROZATLAN INTEGRÁL, EGYSZERŰBB INTEGRÁLÁSI FORMULÁK, ALAPFÜGGVÉNYEK INTEGRÁLJAI A differenciálszámítás alapfeladata : adott H halmazon értelmezett függvényhez megkeresni a deriváltat ( derivált függvényt ). Az integrálszámítás feladata fordított : adott egyváltozós valós f függvényhez kell olyan F függvényt meghatározni, amelyre minden x ∈ H esetén F’(x) = f(x). Ha valamely H halmazon F’ = f, akkor az F függvényt az f függvény primitív függvényének nevezzük. Ha F primitív függvénye f-nek, akkor F+C
is primitív függvénye annak, ahol C tetszőleges állandó ( állandó függvény ) Az f függvény primitív függvényeinek összességét f határozatlan integráljának nevezzük / ∫ f(x) dx /. Egy függvénynek végtelen sok primitív függvénye van, amelyek csak állandóban különböznek egymástól. Az f függvény az integrandus, a C állandó az integrációs állandó Egyszerűbb integrálási formulák : 1. Parciális integrálás ( szorzatintegrálás ) 2. Helyettesítéses integrálás 3. Racionális törtfüggvények integrálása 4. Speciális esetek F(ax+b)n+1 +C n dx = f (ax+b) ∫ a·n+1 f +C ∫ f dx = ln│f │+ C ∫ f ·f’ dx = α+1 f’(x) (x) α (x) (x) α+1 Alapfüggvények integráljai : xn+1 ekx ax ∫ xn dx = n+1 + C ∫ ekx dx = k + C ∫ ax dx = ln a + C ∫ 1/x dx = ln│x│+ C ∫ sin x dx = - cos x + C ∫ cos x dx = sin x + C 13. A PARCIÁLIS INTEGRÁLÁS ÉS A RACIONÁLIS TÖRTFÜGGVÉNYEK INTEGRÁLÁSA 1. a parciális
integrálás : ∫ f(x) · g’(x) dx = f(x) · g(x) - ∫ f’(x) · g(x) dx xn ln x ax, sin x ex, cos x ∫ x · ln x dx ► ∫ f(x) · g’(x) dx = f(x) · g(x) - ∫ f’(x) · g(x) dx g’ f f’ = 1/x 2 g= x /2 ln x · x2/2 - ∫ 1/x · x2/2 dx = x2/2 · ln x – x2/4 + C 2. racionális törtfüggvények integrálása : Racionális törtfüggvény határozatlan integrálja racionális ( egész- és tört- ), logaritmus és arc tg függvényekből állhat. Ha a számláló fokszáma nem kisebb a nevező fokszámánál, akkor az osztás elvégzése után a függvény egy polinom és egy valódi törtfüggvény összegeként írható fel ( valódi racionális törtfüggvény; ha a számláló fokszáma nagyobb a nevezőénél, akkor az áltörtfüggvény ). ax2+bx+c 1. dx = ∫ ax + b + c/x dx x ∫ 2. ∫ ∫ ∫ A A · ln│ax + b│ dx = +C ax+b a 9 9 · ln│3x + 1│ dx = +C 3x+1 3 3. a résztörtekre való bontás módszere 1. eset – a nevezőnek vannak
gyökei ( zérushelyei ) x+1 x+1 dx = dx 1. lépés nevező gyöktényezős alakban felírva x3-4x x(x-2)(x+2) ∫ ∫ x+1 A B C = + + 2. lépés felbontás résztörtekre x(x-2)(x+2) x x-2 x+2 x+1 A(x-2)(x+2)+Bx(x+2)+Cx(x-2) = 3. lépés közös nevezőre hozás x(x-2)(x+2) x(x-2)(x+2) x+1=A(x-2)(x+2)+Bx(x+2)+Cx(x-2) 4. lépés a nevezőt elhagyjuk, majd x helyére behelyettesítjük a 0, 2, -2 értékeket. Az egyenleteket sorban megoldva A = -1/4, B = 3/8, C = -1/8. x+1 ∫ x -4x 3 dx = 1 1 3 1 1 1 1 3 1 ∫ (- 4 ⋅ x + 8 ⋅ x-2 - 8 ⋅ x+2 dx )=- 4 1nx+ 8 lnx-2- 8 ln x+2+C 2. eset – a nevezőnek nincs gyöke ( zérushelye ) ∫ ∫ ∫ 5 x2+1 ∫ 1 x2+1 dx = arc tg x + C alak használható x 1 2x 1 ha a számláló elsőfokú, akdx = dx = ln x2+1+ C kor az f’/f alak használható x2+1 2 x2+1 2 5 1 5 5 x 2 dx = 5/4 arc tg x/2 + C dx = x2 +1 dx = 4 2 x +4 4 2 +1 4 ∫ ∫( 4x ∫ x +4 2 ∫ dx = 5 arc tg x + C ) ∫( ) 2x
∫ x +4 dx = 2 ln x +4+ C dx = 2 ∫ 2 2 4x+3 4x 3 dx = 2 + 2 dx = 2 2 x +1 x +1 x +1 ∫ 2x 3 + 2 dx = 2 ln x2+1+ 3 arc tg (x2+1) + C 2 x +1 x +1 14. A határozott integrál fogalma, tulajdonságai, kiszámítása ( Newton-Leibniz formula ) ∫ lim Σ f(ξ )·Δxi = f(x) dx f(x) n↦∞ i=1 f(ξi) a b n i a n Σ f(ξ )·Δxi i=1 i b ξi Δx1, Δx2, Δxi A függvénygörbe alatti terület kiszámításához az a, b intervallumot n részre osztjuk. Az i-edik rész egy tetszőleges pontja ξi, egy elemi cella területe aΔx i és f(ξi) szorzataként adódó téglalap területe. Az f(x) függvény [ a; b ]-on vett határozott integráljának ( Riemann integráljának ) az integrálközelítő összeg határértékét nevezzük, ha az a határérték véges és független a felosztás milyenségétől. A határozott integrál tulajdonságai : b b b ∫a ( f ± g ) = ∫a f ± ∫a g b b b ∫a c · f = c ∫a f a a ∫ f = - ∫bf ∫af = 0
a A határozott integrál kiszámítási szabálya : b ξi (x) a T(x) a ∫ f dx = [F ] = F – F b x Δx b (x) a (b) (a) Newton – Leibniz szabály T = Δx · F(ξi) Ha Δx ↦ 0, akkor T’(x) = f(x) ( azaz T(x) primitív függvénye f(x)-nek ), T(x) = F(x)+ C Az f(x) függvény a és x közötti határozott integrálját számolva ( ez T(x) ) : x ∫ f(x) dx = F(x) + C a ha x = a, akkor F(a) + C = 0 x C = - F(a) ha x = b, akkor ∫ f(x) dx = F(b) – F(a) a 15. A HATÁROZOTT INTEGRÁL ALKALMAZÁSAI AZ IMPROPRIUS INTEGRÁL A határozott integrál alkalmazásai : 1. terület- és térfogatszámítás b d d területszámítás c 1. négyszögek területszámítása a b ∫T∫ f(x,y) dy dx =a∫(c∫f(x,y) dy) dx 2. két függvénygörbe által határolt terület számítása f2 b f1 ∫T∫ f(x,y) dy dx =a∫(f∫f(x,y) dy) dx térfogatszámítás f1 2 f(x) b V = π a∫ [ f(x) ]2 dx Forgáskúpnál r f(x)=m x, tehát m V = π ∫ [ r x ]2
dx 0 m 2. ívhossz számítás 3. forgástestek felszínének kiszámítása 4. mechanikai alkalmazások ( Steiner tétel, I és II rendű nyomatékok ) Az improprius integrál A határozott integrál értelmezése kiterjeszthető olyan esetekre is, amikor az integrációs intervallum végtelen, vagy az integrandus nem korlátos, vagy mindkét eset egyszerre áll fenn. Ilyenkor improprius integrálokról beszélünk +∞ R +∞ c -∞ B ∫ f dx = lim ∫f dx ∫ f dx = ∫ f dx + ∫ f dx = lim ∫ f dx (x) a R ↦+∞ a (x) (x) -∞ (x) -∞ (x) c A ↦-∞ B ↦+∞ A (x) Az improprius integrál kiszámításakor először a primitív függvényt keressük meg, majd a nem véges határ(ok) helyett határértékkel számolunk. 16-17. VEKTOR, VEKTORMŰVELETEK VEKTOR KOORDINÁTÁI MŰVELETEK KOORDINÁTÁK SEGÍTSÉGÉVEL A vektor alatt irányított szakaszt értünk. A vektor megadásához ismernünk kell annak hosszát és irányát. Az irány megadásához
térben két számadatra van szükség, így a vektort három számmal adhatjuk meg. A vektor megadható térbeli koordinátáinak számhármasával is Ha a vektor kezdőpontja a térnek egy meghatározott pontja, akkor kötött vektorról, ellenkező esetben szabad vektorról beszélünk. Az irányított szakasz hosszát a vektor abszolút értékének nevezzük, jelölése│ a│. Ha │a│= 1, akkor az a vektor egységvektor, jelölése a0 Ha │ a│= 0, akkor az a vektor zérusvektor, jelölése 0 Két vektort egyenlőnek tekintünk akkor, ha párhuzamos eltolással egymásba átvihetők ( fedésbe hozhatók ), azaz ha eltolás után kezdőpontjuk egybeesik, és úgyszintén a végpontjuk is. Műveletek : összeadás, kivonás szorzás számmal skaláris szorzás ab = │a│·│b│· cos φ vektoriális szorzás │axb│=│a│·│b│·sin φ Vektorok megadása koordinátákkal. v = v1i + v2j + v3k = ( v1, v2, v3 ) A v1, v2, v3 számokat a vektor i, j, k bázisra
vonatkozó koordinátáinak nevezzük. Vektorműveletek koordináták segítségével a ± b = ( a1±b1, a2±b2, a3±b3 ) a · b = a1b1+a2b2+a3b3 │a│=√ a12+a22+a32 λa = ( λa1, λa2, λa3 ) i j k a x b = a1 a2 a3 = i(a2b3-a3b2)-j(a1b3-a3b1)+k(a1b2-a2b1) b1 b2 b3 18. VEKTOROK ALKALMAZÁSAI EGYENES ÉS SÍK EGYENLETE, MUNKASZÁMÍTÁS A vektorok geometriai alkalmazásai : - két pont távolságának meghatározása vektor vetületvektorának meghatározása egyenes és sík döféspontjának meghatározása pont és sík távolságának meghatározása két sík szögének meghatározása két egyenes szögének meghatározása, merőlegesség kimutatása egyenes és sík szögének meghatározása pont és egyenes távolságának meghatározása két egyenes távolságának meghatározása két sík metszésvonalának meghatározása területszámítás ( pl. háromszög területe ) Az egyenes egyenletének meghatározása P Az egyenes paraméteres vektoregyenlete v P0
r0 r r = r0 + t ⋅ v ( az r vektort megkaphatjuk az r0 és a t paraméterrel megszorzott v vektor összegéből ) A fenti egyenlet bal és jobb oldalán álló vektorok megfelelő koordinátái egymással egyenlők, tehát x = x + at 0 Az egyenes skaláris y = y0 + bt paraméteres vektoregyenlete z = z0 + ct A sík egyenletének meghatározása P n P0 r – r0 r r0 A P0(x0,y0,z0) pontra illeszkedő, az n=(A,B,C) normálvektorra merőleges sík egyenlete : ( r – r0 ) n = 0 [ vagy r⋅n - r0⋅n = 0 ] a skaláris szorzást elvégezve, a sík A(x-x0) + B(y-y0) + C(z-z0) = 0 alakú, általános egyenletéhez jutunk. Munkaszámítás A munkát az erő és az elmozdulás skaláris szorzataként kaphatjuk meg. W=F⋅r P ( 1, -2, 6 ) P0 ( 3, -5, 1 ) F ( 8, 6, 3 ) r = ( x-x0, y-y0, z-z0 ) = ( -2, 3, 5 ) W = -16 + 18 +15 = 17 19. A KÉTVÁLTOZÓS FÜGGVÉNY A PARCIÁLIS DERIVÁLT Kétváltozós valós függvényen olyan függvényt értünk, amelynek értelmezési tartománya
része a R2 halmaznak, értékkészlete pedig része R-nek ( f: R2↦R ). Az f(x,y) = z jelölést bevezetve, a P(x, y, z) pontokból álló halmazt a függvény grafikonjának nevezzük. Ez a ponthalmaz általában egy felületet alkot, ezért azt mondjuk, hogy a kétváltozós függvény felülettel ábrázolható. A felület egyenlete : z = f(x,y), z-t függő változónak, x-et és y-t független változóknak nevezzük. x = konstans y = konstans z = konstans A parciális deriváltat alkalmazzuk a kétváltozós függvények szélsőérték keresésére. D = f’’xx·f’’yy - (f’’xy)2 A parciális derivált ahol D>0, ott van szélsőérték, itt ha f’’xx >0, akkor minimuma van, ha f’’xx<0, akkor maximuma. A többváltozós valós f függvény változói közül egy kivételével az összes többit tekintsük állandónak. Az így keletkező egyváltozós függvény deriválható, ha a kiválasztott változóval a deriválhatóságra vonatkozó
feltételek teljesülnek. A többváltozós függvény valamely változója szerinti deriváltat nevezzük parciális deriváltnak. Jelölése : f’(x), ( ∂f/∂x ) vagy f’(y) ( ∂f/∂y ). A parciális derivált a függvénygörbéből kimetszett vonal meredekségét adja meg. f1 Tiszta másodrendű parciális derivált : f’xx, vagy f’yy f2 y0 x0 Vegyes másodrendű parciális derivált : f’xy, vagy f’yx 20. A VEKTOR-SKALÁR FÜGGVÉNY Az olyan függvényt, amelynek értelmezési tartománya valós számokból, értékkészlete vektorokból áll, vektor-skalár függvénynek nevezzük. Legyen a függvény jele r, t pedig az értelmezési tartomány egy eleme. Ekkor r(t) a függvény t helyen vett helyettesítési értékét jelöli. Ha r koordinátái x, y, z akkor ezek a koordináták t függvényei, így : r(t) = x(t)i + y(t)j + z(t)k Ez az egyenlet egy térgörbe vektoregyenlete. Ennek a térgörbének a skaláris egyenletrendszere : x = x(t); y = y(t); z =
z(t). A vektor-skalár függvény térgörbével ábrázolható, egy térgörbe pedig vektor-skalár függvénnyel írható le A térgörbe egyenletei pontmozgás jellemzésére is használhatók. r(t) Δr = r(t+Δt) – r(t) Δr r(t) lim Δt↦0 r(t+Δt) r(t+Δt)-r(t) = r(t) Δt térgörbe érintő irányú vektora (sebességvektor) A csavarvonal egyenlete : r(t) = cos t · i + sin t · j + t · k t2 ∫ s = │r(t)│ dt A térgörbe ívhossza : t1 t1 s t2 Sebesség, gyorsulás : v=r P an a=r Határozzuk meg az r = ( t, t2, 2/3 t2 ) egyenlettel jellemzett pontmozgás sebesség- és gyorsulásvektorát, a sebességvektor abszolút értékét ! v = r = ( 1, 2t, 2t2 ) a = r = ( 0, 2, 4t ) a sebességvektor abszolút értékének meghatározása ( pályasebesség ) : │v│ = √ 1+4t2+4t4 = 1+ 2t2 21. A SKALÁR-VEKTOR FÜGGVÉNY, SZINTFELÜLET, GRADIENS Az olyan függvény, amelynek értelmezési tartománya vektorokból, értékkészlete valós számokból áll,
skalár-vektor függvényeknek nevezzük. Az u skalár-vektor függvény r helyen vett helyettesítési értékét a szokásos módon u(r) jelöli. Ha r = ( x, y, z ), akkor u(r) felírható u( x, y, z ) alakban is A skalárvektor függvényt szintfelületeivel ábrázoljuk Az u függvény szintfelületét azok az ( x, y, z ) pontok alkotják, amelyekben u( x, y, z ) állandó. Egy-egy szintfelület egyenlete tehát u( x, y, z ) = u0. A skalár-vektor függvény egy háromváltozós függvénnyel egyenértékű. A háromváltozós függvény felfogható olyan függvényként is, amely a tér pontjaihoz egy-egy valós számot rendel A tér pontjai viszont vektorként kezelhetők, így a háromváltozós függvény vektorhoz valós számot rendel Például skalár-vektor függvény az, ha a tér minden egyes pontjához az illető pontbeli hőmérsékletet rendeljük. szintfelületek A skalár-vektor függvény deriváltja a gradiens vektor. Mivel a gradiens vektor merőleges a
szintfelületre, ezért felhasználhatjuk egy felület normálvektorának meghatározására. grad u = grad u elmozdulás vektor szintfelület ∂u ∂u ∂u i+ j+ k ∂x ∂x ∂z Ha bevezetjük a nablavektort ( ▽ ), akkor grad u felírható a ▽ vektornak és az u skalárnak a szorzataként, az alábbi módon : grad u = ▽ u • A nabla vektor megadási módja : ( ▽ ∂ ∂ ∂ , , ∂x ∂y ∂z ) érintősík A gradiens vektor megadja egy függvény maximum változásának irányát is. 22. A VEKTOR-VEKTOR FÜGGVÉNY DIVERGENCIA, ROTÁCIÓ, ÖRVÉNYESSÉG, FORRÁSOSSÁG Az olyan függvényt, amelynek értelmezési tartománya és értékkészlete is vektorokból áll, vektor-vektor függvénynek nevezzük. A fizikai alkalmazásoknál jelentősek az olyan függvények, ahol vektorhoz vektort rendelnek A vektor-vektor függvény megadása három skalár-vektor függvény, v1, v2, v3 megadásával történhet. v(r) = v1( x, y, z ) i + v2 ( x, y, z ) j + v3 ( x, y,
z ) k, vagy v = ( v1, v2, v3 ) A vektor-vektor függvény ábrázolása nehézkes. Az egyik lehetőség az áramvonalakkal történő ábrázolás A vektortér áramvonalai azok a görbék, amelyeknek minden pontjában az érintő iránya megegyezik az illető ponthoz tartozó vektor irányával Másik ábrázolási mód az áramcsővel való ábrázolás Vektor-vektor függvénynyel írható le pl. egy áramló folyadéknak a sebességviszonyai. Itt a tér minden pontjához egy-egy sebességvektort rendelünk. áramvonalak A vektortér örvényesség szempontjából lehet örvényes, vagy örvénymentes ( az örvénymentes vektortér zárt görbe menti integrálja – cirkulációja – 0 ). Forrásosság szempontjából forrásos, vagy forrásmentes ( forrásnak az olyan pontot nevezzük, amelyben új áramvonal keletkezik ). Divergencia : skaláris mennyiség, fizikai jelentése forrássűrűség. div v = ▽ · v = ∂X ∂Y ∂Z + + a forrásmentes vektortér esetén div v =
0 ∂x ∂y ∂z Rotáció : vektormennyiség, fizikai jelentése örvénysűrűség. i j k ∂ ∂ ∂ rot v = ▽x v = az örvénymentes vektortér esetén rot v = 0 ∂x ∂y ∂z x y z 23. A DIFFERENCIÁLEGYENLET ÉS OSZTÁLYOZÁSA SZÉTVÁLASZTHATÓ VÁLTOZÓJÚ DIFFERENCIÁLEGYENLET A differenciálegyenlet olyan egyenlet, amelyben ismeretlen függvények, ezek deriváltjai, valamint független változói fordulnak elő. Ha a differenciálegyenletben egyetlen független változó van, akkor az közönséges differenciálegyenlet, ha kettő vagy több független változó van benne, akkor parciális differenciálegyenlet. A differenciálegyenletek osztályozási szempontjai : - rendűség - lineáris/nemlineáris - homogén/inhomogén - állandó/fgv. együtthatós A differenciálegyenlet rendűségét a benne szereplő derivált rendűsége határozza meg. A lineáris differenciálegyenletben az ismeretlen függvény és annak deriváltjai csak első hatványon fordulnak
elő, s azok szorzatai sem szerepelnek az egyenletben. Ellenkező esetben a differenciálegyenlet nemlineáris. Ha a közönséges differenciálegyenletben van olyan tag, amely állandó, vagy amelyben csak a független változó szerepel, akkor az inhomogén, ha nincs, akkor homogén. Ha a függvényt és deriváltjait tartalmazó tagok együtthatói állandók, akkor állandó együtthatós a differenciálegyenlet A nem állandó együtthatós differenciálegyenletek a függvényegyütthatósak A differenciálegyenlet megoldása alatt olyan függvények keresését értjük, amelyek kielégítik az egyenletet. A közönséges differenciálegyenlet megoldásfüggvényének görbéje az integrálgörbe ( megoldásgörbe ) A közönséges differenciálegyenletnek három megoldását különböztetjük meg : 1. Általános megoldás ( az a fgv, amely pontosan annyi – egymástól független – tetszőleges állandót tartalmaz, ahányad rendű a differenciálegyenlet ) 2. Partikuláris
megoldás ( az a megoldás, amelyet az általános megoldásból úgy származtatunk, hogy az abban szereplő állandó(k)nak meghatározott érték(ek)et adunk ) 3. Szingurális megoldás ( általában nem kapható meg az általános megoldásból, egyik pontjában sem tesz eleget az unicitás feltételének ) Az elsőrendű differenciálegyenletek esetében a közvetlenül integrálható és a szétválasztható változójú egyenleteket különböztethetjük meg. Az első esetre például az y’ = f(x) típusú differenciálegyenlet szolgál. Azok az y’ = f(x,y) differenciálegyenletek, amelyek y’ = f(x) ∙ g(y) alakra hozhatóak, a szeparálható differenciálegyenletek. dy 1. y’ = f(x) ∙ g(y) alakból dx = f(x) ∙ g(y) alakba térünk át 2. a változókat szeparáljuk 3. elvégezzük az integrálást ∫ dy 1 g(y) = f(x) dx ⇛ g(y) dy = f(x) dx ∫ ∫ ∫ 24. ELSŐRENDŰ LINEÁRIS DIFF EGYENLET MEGOLDÁSA Az elsőrendű lineáris differenciálegyenletben az
ismeretlen függvény, s annak deriváltja is első hatványon szerepel, s közöttük szorzókapcsolat sincs. Az elsőrendű lineáris differenciálegyenlet általános alakja : a(x)y’ + b(x)y = k(x) ha k(x) = 0, akkor homogén, ha k(x) ≠ 0, akkor inhomogén A homogén differenciálegyenletet szeparálással és integrálással lehet megoldani. Az inhomogén egyenletet az ún. állandó variálás módszerével ( Lagrangeféle módszer ) oldjuk meg 1. Az a(x)y’ + b(x)y = k(x) egyenletből a zavaró k(x) függvényt elhagyjuk, helyére 0-t írunk. A homogén részt megoldjuk, annak egy ∙ YC (x) ∫ b dx megoldását kapjuk. Ennek általános megoldása : Y = C ∙ e (x) 2. Az inhomogén differenciálegyenlet megoldását az y = C(x) ∙ Y(x) alakban keressük. Az eredeti egyenletbe ezt a homogén y-t helyettesítjük vissza és ebből meghatározzuk a C(x) függvényt. 3. A C(x) függvény integrálással kapott értékét visszahelyettesítjük a homogén részbe, s ezzel
megkapjuk az inhomogén részt. 4. Az inhomogén differenciálegyenlet általános megoldása : y = yI + yH y’ + 2xy = 4x 1. y’ + 2xy = 0 Y = C ∙ e - ∫ 2x dx yH = C(x) ∙ e – x2 2. ( C(x) ∙ e – x2 )’ + 2x ( C(x) ∙ e – x2) = 4x 3. C’(x) ∙e– x2 – C(x) ∙ 2x ∙ e – x2 + 2x ∙ C(x) ∙ e – x2 = 4x 4. C’(x) = 4x ∙ e x2 C(x) = 2 ∫ e x2 ∙ 2x dx 5. yI = 2e x2 ∙ e– x2 = 2 y = yI + yH C’(x) ∙ e –x2 = 4x C(x) = 2e x2 y = C(x) ∙ e – x2 + 2 25. MÁSODRENDŰ MEGOLDÁSA. LINEÁRIS Általános alakjuk a következő : DIFFERENCIÁLEGYENLET ay’’ + by’ + cy = 0 Az a, b, c értékek konstansok, a ≠ 0, y értéke lehet 0, ez a triviális megoldás. 1. Ha az y1 és az y2 függvény megoldása a differenciálegyenletnek ( két gyöke van ), s azok nem konstansszorosok, akkor a differenciálegyenlet minden megoldása Y = C1 ∙ y1 + C2 ∙ y2 alakban írható fel. 2. Ha y = u1(x) + i∙u2(x) [ i2 =-1 ) komplex függvény
megoldása egy differenciálegyenletnek, akkor u1(x) és u2(x) külön-külön szintén megoldás lesz A másodrendű lineáris differenciálegyenlet megoldásához elég két, egymástól független partikuláris megoldást megkeresni, s azután fel lehet írni az általános megoldást. Az y = eλx a kézenfekvő megoldás, az egyenlet partikuláris megoldásait ebben az alakban kell keresni. Ezt behelyettesítve az eredeti egyenletbe, a következő alakhoz jutunk : eλx ( aλ2 + bλ + c ) = 0 a differenciálegyenlet karakterisztikus egyenlete Feladat a λ kisz ámítása [ mivel e λx ≠ 0, ezért az egyenlet csak akkor lehet 2 igaz, ha aλ + bλ + c = 0 ]. A karakterisztikus egyenlet diszkriminánsa szerint három esetet különböztetünk meg : 1. D > 0, két valós gyök van, λ1 és λ 2, ezekez behelyettesítve a következő alakhoz jutunk : Y = C1 ∙ eλ1x + C2 ∙ eλ2x 2. D = 0, egy valós gyök van, y1 = eλx - még egy partikuláris megoldást kell keresni. Ezt az
állandó variálás módszerével megkeresve, y2= x · eλx értékét kapjuk. Behelyettesítve : Y = eλx ( C1 + C2 ∙ x ) 3. D < 0, itt csak konjugált gyökök vannak, az Euler képlet felhasználásával : Y = ex ( C1 cos β x + C2 ∙ sin β x ) [ λ1=+jβ; λ2=-jβ ] 26. KOMBINATORIKA : PERMUTÁCIÓ, VARIÁCIÓ, KOMBINÁCIÓ 1. permutáció : adott n elemet hányféleképpen lehet sorrendbe rakni a./ ismétlés nélküli : ha minden elem különböző Pn = n(n-1)1 = n ! n! k b./ ismétléses : ha vannak azonos elemek Pn = k! 2. variáció : n különböző elemből k db-ot választok ki, úgy hogy a kiválasztás sorrendje lényeges. n! k a./ ismétlés nélküli ( 1 elem 1-szer fordul elő ) Vn = n-k! b./ ismétléses ( 1 elem többször is előfordulhat ) Vnk = nk 3.kombináció : n különböző elemből k db-ot választok ki, a sorrendre való tekintet nélkül k n ( ) n V k a./ ismétlés nélküli Cn = k = k(n-k)! = k!n b./ ismétléses Cn = n+k-1 k (
k ) 27. ESEMÉNY FOGALMA, ESEMÉNYMŰVELETEK A VALÓSZÍNŰSÉG FOGALMA, AXIÓMÁI Egy kísérlet egyes megkülönböztethető véletlentől függő, lehetséges kimeneteleit ( a megfigyelés eredményeit ), elemi eseménynek, az elemi események összességét pedig eseménytérnek nevezzük. Az eseménytér bármely részhalmazát eseménynek nevezzük Egy A esemény elemi esemény akkor, ha nem állítható elő tőle különböző események összegeként. Az eseménytér jelölésére az Ω, vagy a Q használatos, az elemi eseményeket dőlt nagybetűkkel jelöljük. Valamely kísérletnél biztos esemény az, amely a kísérlet során minden esetben bekövetkezik, jele H ( vagy I ). A lehetetlen esemény az, amely a kísérlet során sohasem következhet be, jele Ø. AzΩ teljes eseménytér a biztos eseménynek felel meg, hiszen tartalmazza az összes elemi eseményt A Ø üres halmaz az eseménytér egyetlen elemét sem tartalmazza, ezért akármilyen kimenetele van a
kísérletnek, a Ø esemény nem következhet be. Eseményműveletek : 1. összeg : az az eseményt, amelyben az A vagy B esemény közül legalább az egyik bekövetkezik, jelölés : A ⋃ B, ill. A + B pl. { 1, 2 }⋃{ 2, 3 } = { 1, 2, 3 } 2. különbség : az az esemény, amely akkor következik be, ha az A esemény bekövetkezik, de az B nem, jelölés : AB, ill. A – B pl { 1, 2 }{ 2, 3 } = { 1 } 3. szorzat : az az esemény, amelyben mind az A, mind a B esemény, vagyis mindkettő bekövetkezik, jelölés : A ⋂ B, ill. A · B pl. { 1, 2 }⋂{ 2, 3 } = { 2 } A valószínűségszámítás a véletlen tömegjelenségek vizsgálatával foglalkozik ( véletlen jelenség az , amelynek a végeredményét nem tudjuk pontosan meghatározni; tömegjelenség pedig az azonos körülmények között tetszőlegesen sokszor megismételhető jelenség ). Ha n db kísérlet során vizsgáljuk A esemény bekövetkezését ( k-szor ), az esemény relatív gyakoriságát kapjuk meg : k 0≤k≤n
0≤ k ≤1 n n A tapasztalat azt mutatja, hogy ha egyre több kísérletből álló sorozatból határozzuk meg az A esemény relatív gyakoriságát, akkor a kapott relatív gyakoriságok egyre kisebb mértékben ingadoznak egy rögzített szám körül. Ezt a számot az A esemény valószínűségének nevezzük, s P(A)-val jelöljük. A valószínűség axiómái : 1. egy A esemény valószínűsége 0 ≤ P(A) ≤ 1 2. egy biztos esemény valószínűsége P(H) = 1 lehetetlen esemény valószínűsége P(Ø) = 0 3. két esemény összegének valószínűsége, ha A ∙ B = 0, P(A+B) = P(A) + P(B) 4. A + A = H ( ez biztosan teljesül ), A · A = 0 ( egymást kizárják ) P(A+A) = P(H) P(A)+P(A) = 1 Ø=H P(Ø) = 1 – P(H) = 0 28. VISSZATEVÉSES ÉS VISSZATEVÉS NÉLKÜLI MINTAVÉTEL Az N számú mintából, amelyben k számú hibás elem van, n db elemet kiválasztunk. Annak a valószínűségét keressük, hogy ebből M db hibás lesz N = összes elemek száma k =
jelzettek száma összesen n = a kiválasztott elemek száma M = a jelzettek száma Visszatevés nélküli mintavétel, bármelyik elem kiválasztásának azonos az esélye, mert nem tesszük vissza. M N-M k n-k P(A) = N n ( )( ) ( ) Visszatevéses mintavétel, egy elemet többször is választhatunk, mert viszszatesszük. ( )( ) ( P(A) = n k ) M k N-M n-k k M 29. KLASSZIKUS VALÓSZÍNŰSÉG NEVEZETES DISZKRÉT ELOSZLÁSOK. Ha egy véges sok elemi eseményből állóΩ eseménytér minden eseményéhez egyenlő valószínűség tartozik, azaz az események egyenlően valószínűek, akkor egyenlő valószínűségi mezőről, vagy más szóval klasszikus valószínűségi mezőről beszélünk. HaΩ n elemi eseményből áll, és ezek mindegyike 1/n valószínűségű, akkor egy k számú elemi eseményt tartalmazó A esemény valószínűség k·1/n = k/n, azaz : A elemeinek száma kedvező esetek száma P(A) = = Ω elemeinek száma összes esetek száma Ez a képlet csak a
klasszikus valószínűségi mező esetén használható P(A) kiszámítására ! Nevezetes diszkrét eloszlások : Binomiális eloszlás : Mi annak a valószínűsége, hogy egy kísérletben az A esemény pontosan k-szor következik be ? Annak valószínűsége, hogy n ( n = 1, 2) független kísérletsorozatban az A esemény pontosan k-szor következik be, azaz az A esemény bekövetkezéseinek számát megadó ξ valószínűségi változó xξ értéke éppen k ( tehát ξk = k ) a következő képlettel adható meg : n p(ξ=k) = k ·pk·( 1-p )n-k M(ξ) = np D(ξ) =√ np(1-p) Poisson-eloszlás : A Poisson-eloszlásnál a ξ lehetséges értékeinek halmaza nem véges, hanem végtelen. Az eloszlás : λk p(ξ =k) = · e-λ λ>0 M(ξ) = λ D(ξ) =√ λ k! ( ) Hipergeometriai eloszlás : ez egy visszatevés nélküli mintavételes eloszlás M N-M N-n k n-k p(ξ =k) = M(ξ) = np D2(ξ) =np(1-p) N N-1 n ( )( ) ( ) 30. MÁTRIXOK, VEKTOROK, MŰVELETEK Elemeknek egy
téglalap alakú táblázatban, azon belül sorokban és oszlopokban elrendezett rendszerét mátrixnak nevezzük. a11 a12 a1n A mátrixok általános alakja. Az a11, a12, amn számok ( esetleg függvények ) a mátrix elemei A kettős indexelés az elea21 a22 a2n mek helyét mutatja Az aik elem az i-edik sor k-adik eleme am1 am2 amn A mátrixnak m sora és n oszlopa van, ezért szokás azt mondani, hogy mХn típusú. A mátrix jelölésére vastag nagy betűt használunk, s indexben tüntetjük fel a sorok, oszlopok számát A(m,n). A mátrix oszlopait soraival felcserélve a mátrix transzponáltját kapjuk, jelölései : A*, AT, At, A’. Ha a mátrixnak ugyanannyi sora van, mint oszlopa, akkor kvadratikus mátrixnak nevezzük. Az n sorból és oszlopból álló kvadratikus mátrixról azt mondjuk, hogy n-ed rendű Ha az A kvadratikus mátrix megegyezik a transzponáltjával, vagyis A = A*, akkor A szimmetrikus mátrix. A szimmetrikus mátrix elemei a főátlóra nézve
szimmetrikus elrendezésűek, azaz aik = aki ( a főátlót az a11, a22, ann elemek alkotják ) Ha az A kvadratikus mátrix esetében A = -A*, akkor A ferdén szimmetrikus mátrix. Ha a D kvadratikus mátrix főátlóján kívül valamennyi eleme 0, akkor D átlós, vagy diagonális mátrix. Ha egy diagonális mátrix főátlójában álló valamennyi eleme 1, akkor ezt egységmátrixnak nevezzük A csupa 0-ból álló mátrixot nullamátrixnak nevezzük, jele : 0. A mátrixok körében kitüntetett szerepe van az 1 sorból, v. oszlopból álló mátrixoknak. Ezeket oszlop-, ill sormátrixoknak nevezzük, és vastag kisbetűvel jelöljük ( oszlop-, ill sorvektoroknak is szokás nevezni ) A nagy méretű mátrixokat, particionálni szokták ( szektoa1 a = a2 a* = a1 a2 an rokra bontják ). Két mátrixot csak akkor tekintünk egyenlőnek, ha azonos típusúak és megfean lelő elemeik is azonosak. Műveletek mátrixokkal : 1. összeadás : A + B = ( aik + bik ) mátrixok
összegét úgy képezzük, hogy az azonos helyen álló ( azonos indexű ) elemeket összeadjuk. 2. kivonás : A - B = ( aik - bik ) mátrixok különbségét úgy képezzük, hogy az azonos helyen álló ( azonos indexű ) elemeket egymásból kivonjuk. 3. mátrix szorzása számmal : λA = ( λaik ) mátrixok szorzatát úgy képezzük, hogy a mátrix mindegyik elemét megszorozzuk a számmal. 4. mátrixok szorzása : Az A mátrixnak a B mátrixszal való AB szorzata csak akkor értelmezhető, ha A-nak ( bal oldali tényező ) ugyanannyi oszlopa van, mint ahány sora van B-nek. Ebből következik, hogy az A(m,p) és B(p,n) mátrixok AB szorzata értelmezhető. Az első tényező sorvektorait skalárisan összeszorozzuk a második tényező oszlopvektoraival és a szorzatot a tényezőknek megfelelő helyre írjuk. 3 2 4 5. mátrixok hatványozása : csak kvadratiFALK-FÉLE 2 1 0 kus mátrixok esetén végezhető el. A2 = A · A ELRENDEZÉS 3 5 3 An = A·A n 2 5 1 19 14 11 4 3 6 36
41 34 31. LINEÁRIS TÉR, BÁZIS, BÁZISTRANSZFORMÁCIÓ Az X halmazt lineáris térnek nevezzük, ha értelmezve van benne az összeadás és a számmal való szorzás, továbbá : Pl. lineáris tér a háromdimenaz összeadás : ziós vektorok halmaza is. - kommutatív, azaz a + b = b + a - asszociatív, azaz ( a + b ) + c = a + ( b + c ) - létezik nullaelem ( 0 ), azaz a + 0 = a, minden a-ra - minden a-hoz létezik -a inverz elem, vagyis a + ( - a ) = 0 a számmal való szorzás esetén : - 1·a=a - (βa) = (β)a Az egységvektor : - (+β)a = a + βa e1 ( 1, 0, , 0 ) e2 ( 0, 1, , 0 ) en ( 0, 0, , 1 ) - (a+b) = a + b Az X lineáris tér a, b, c elemeit vektoroknak, az X teret pedig lineáris vektortérnek nevezzük. Az a1, a2, ak vektorrendszert az X lineáris tér generáló rendszerének mondjuk, ha minden x Є X vektor előállítható az a1, a2, ak vektorok lineáris kombinációjaként ( x = 1a1+2a2+kak ). A b1, b2, bk vektorok a lineáris
tér bázisrendszerét ( röviden bázisát ) alkotják, ha lineárisan függetlenek és a lineáris tér minden vektora előállítható e vektorok lineáris kombinációjaként. A b1, b2, bk vektorokat bázisvektoroknak nevezzük Legyen egy X lineáris tér egy bázisa b1, b2, bk Ekkor tetszőleges x Є X vektor egyértelműen állítható elő a bázisvektorok lineáris kombinációjaként. Az x = ξ1b1 + ξ2b2 ++ ξkbk előállításában szereplő ξ számokat az x vektor b1, b2, bk bázisra vonatkozó koordinátáinak nevezzük. Legyen az Ln térnek egy bázisa b1, b2, bn és legyen b a tér egy tetszőleges, 0-tól különböző vektora. A b vektor bevihető bármelyik olyan bk vektor helyére, amelynek együtthatója a b előállításában nem 0. Vagyis a b = β1b1 + β2b2 ++ βkbk előállításában β k ≠ 0, akkor a bk vektor kicserélhető b-re. Az új bázis tehát : b1, b2, bk-1, b, bk+1, bn. Amikor a bázisnak csak egyik vektorát cseréljük ki, akkor elemi
bázistranszformációt hajtunk végre. Egy adott bázisból egy másikba való áttérést bázistranszformációnak nevezünk. a1 = ( 2, -1, 5 ) a2 = ( 5, 0, -7 ) a3 = ( 7, 2, -1 ) a4 = ( 4, 1, 0 ) e1 = ( 1, 0, 0 ) e2 = ( 0, 1, 0 ) e3 = ( 0, 0, 1 ) Régi bázis e1 e2 e3 a1 a2 a3 a4 e1 e2 e3 2 -1 5 5 0 -7 7 2 -1 4 1 0 1 0 0 0 1 0 0 0 1 2-(7·-½ ) generáló ( pivot ) elem ( ≠ 0 ) pivot elem sora pivot elem oszlopa 5-(-1·-½ ) a1 a2 a3 e1 11/2 5 0 a3 -½ 0 1 e3 9/2 -7 0 Új bázis Az a3 és az e2 vektort cseréljük a4 ½ ½ ½ e1 e2 e3 1 -7/2 0 0 ½ ½ 0 0 1 UTASÍTÁS minden elemből kivonjuk a pivotoszlop 1./2 eleme hányadosát minden sort osztunk a pivot elemmel minden elemből kivonjuk a pivotoszlop 3./2 eleme hányadosát a b c ► b c A bázistranszformáció lépései : e1 a1 b1 c1 e1 b1-δ·a1 c1-·c1 1. bázistáblázat készítése, a vektorok koordinátáinak behelyettesítése a megfelelő helyekre e2
a2 b2 c2 e2 b2-δ·a2 c2-·c2 2. a kicserélendő vektorok oszlopa és sora metszéspontjában a generáló ( pivot ) elem kijelölése e3 a3 b3 c3 e3 b3-δ·a3 c3-·c3 3. a pivot elemmel a pivotsor elemeinek osztása, , , stb meghatározása ek ak bk ck a en an bn cn en bn-δ·an cn-·cn bk ck =δ = ak ak 4. a többi elem meghatározása : az eredeti koordinátából kivonjuk az , , hányadosnak a generáló elemmel megegyező koordináta szorzatát A bázistranszformáció felhasználható a lineáris egyenletrendszerek megoldására is. a1 a2 a3 b 2x1 + 5x2 - x3 = 13 2 5 -1 16 x1 - 2x2 + 4x3 = 20 x1∙ 1 + x2 ∙ -2 + x3 ∙ 4 = 20 3x1 - x2 + 2x3 = 15 3 -1 2 15 x1 x2 x3 b x2 x3 b x3 b b x1 2 5 -1 13 5/2 -½ 13/2 2 14 2 x1=2 x2 1 -2 4 20 -9/2 9/2 27/2 -1 -3 3 x2=3 x3 3 -1 2 15 -17/2 7/2 -9/2 -5 -30 6 x3=6 32. LINEÁRIS PROGRAMOZÁS NORMÁL FELADAT MEGOLDÁSA GRAFIKUSAN A lineáris programozás
általános feladata n változós valós lineáris függvények szélsőértékének ( maximumának, vagy minimumának ) keresése lineáris egyenlőtlenségek, valamint rendszerint a változókra vonatkozó nemnegativitási követelmény által meghatározott halmazon ( konvex poliéderen ). A szélsőérték keresésekor nemcsak a függvényérték meghatározása a feladat, hanem annak a helynek a keresése is, ahol a függvény értéke maximális, ill. minimális A gyakorlati feladatok általában a következő alakú lineáris programozási feladatként fogalmazhatók meg – keresendő egy : f(x)=c1x1+c2x2++cnxn lineáris függvény maximuma és legalább 1 maximumhelye. Ez a kanonikus feladat, röviden : max ctx, feltéve hogy Ax≤bmax és x≥0 A LP feladat egy másik formája a standard feladat, ahol keressük : max ctx, feltéve hogy Ax=bmax és x≥0 A GRAFIKUS MEGOLDÁS Egy üzem kétféle terméket gyárt, 3 fajta alapanyagból. Az első termék 1 egységének
gyártásához az első fajta alapanyagból 3 egység, a második alapanyagból 1 egység szükséges A második termék gyártásához az első alapanyagból 1 egység, a második alapanyagból 2 egység, a harmadik fajta alapanyagból 1 egység szükséges Egy hónapra az üzemnek az alapanyagokból rendre 9, 8, 3.5 egységnyi áll rendelkezésére Az első termék piaci ára 3 egységenként, a második terméké 2 egységenként ( az ár 1/100000 része ). Feladat optimális termelési terv készítése. termék 1. termék 2. termék 1. alapanyag 3 1 2. alapanyag 1 2 3. alapanyag 0 1 alapanyag 1. lépés : a 3x1+2x2 egyenletnek tetszőleges értéket adunk, pl 6-ot, s ábrázoljuk ( vékony piros vonal ) 3. lépés : a vékony piros vonallal ábrázolt célfüggvényt párhuzamosan eltoljuk, s abban a pontban, ahol metszi más függvények egyeneseit, lesz a maximumpont 4. lépés : a célfüggvénybe behelyettesítve a koordinátákat, megkapjuk a haszon maximumát,
12-t. A feladat matematikai modellje a következő lineáris programozási feladatként fogalmazódik meg : max ( 3x1+2x2 ), feltéve hogy : 3x1 + x2 ≤ 9 x1 + 2x2 ≤ 8 x1 ≥ 0 x2 ≥ 0 x2 ≤ 3,5 x2 2. lépés : az egyes egyenlőtlenségeknek értéket adva ábrázoljuk a függvényeket. ( 2, 3 ) x1 33. A SZÁLLÍTÁSI FELADAT Gyakori logisztikai probléma, hogy több feladóhelyről kell valamilyen anyagot ugyancsak több rendeltetési helyre szállítani. A szállítási költségek optimalizálására kidolgozott –mátrixot alkalmazó– megoldási mód a szállítási feladat Egy példa : Két állomásról kell három különböző rendeltetési helyre egy bizonyos árucikket elszállítani. Az első állomáson 20, a másodikon 30 egység áll rendelkezésre Az első és a második rendeltetési hely igénye 20-20, a harmadiké 10. Az egy egységre jutó szállítási díjakat a táblázat tartalmazza Jelöljük a keresendő ismeretleneket xik-val, xik jelentse azt,
hogy az i-edik feladóhelyről a k-adik rendeltetési helyre hány egységet szállítottunk. feladóhely rendeltetési hely I. II. III. I. 3 1 4 II. 2 1 5 Az ismeretlenek mátrixa : X= x11 x12 x13 x21 x22 x23 A feladat az X mátrix elemeinek és a minimális összköltségnek ( z ) a meghatározása. Egy újabb mátrixban most már feltüntetjük a költségmátrix adatain kívül a feladóhelyek kapacitásait és a rendeltetési helyek igényeit is : rendeltetési helyek I. II. III. I. 3 1 4 20 II. 2 1 5 30 feladóhelyek kapacitásai rendeltetési helyek igényei 20 20 10 50 megegyezik az igény és a készlet feladóhelyek A szállítási mátrix soraiból és oszlopaiból az alábbi egyenleteket írhatjuk fel : x11 + x12 + x13 x21 x11 + x22 + x23 x21 x12 + x22 x13 3x11 + + x12 + + 4x13 + 2x21 + x23 x22 = 20 = 30 = 20 = 20 = 10 Ez a szállítási költségek összegeinek minimuma, a célfüggvény. + 5x23 min. Ha
megfordítjuk a feladatot ( -1-szeresét vesszük ), normál feladatra vezethetjük vissza. Ekkor : - z = -3x11 - x12 - 4x13 - 2x21 - x22 - 5x23 max Ezt a feladatot bázistranszformációval oldhatjuk meg ( ld. a következő oldal ) A szimplex módszer. B0 x11 x12 x13 x21 x22 x23 B0 x11 x12 x21 x22 x23 û1 1 1 1 0 0 0 20 û1 1 1 0 0 -1 10 û2 0 0 0 1 1 1 30 û2 0 0 1 1 1 30 û3 1 0 0 1 0 0 20 û3 1 0 1 0 0 20 û4 0 1 0 0 1 0 20 û4 0 1 0 1 0 20 û5 0 0 1 0 0 1 10 x13 0 0 0 0 1 10 z -3 -1 -4 -2 -1 -5 0 z -3 -1 -2 -1 -1 40 2 2 2 2 2 2 100 2 2 2 2 0 80 B0 x11 x21 x22 x23 B0 x11 x21 x23 B0 x11 x23 B0 x23 x12 1 0 0 -1 10 x12 1 0 -1 10 x12 1 -1 10 x11 -1 10 û2 0 1 1 1 30 û2 1 1 0 20 x21 1 0 20 x21 1 10 û3 1 1 0 0 20 û3 1 1 0 20 û3 0 0 0 û3 0 0 û4 -1 0 1 1 10 x22 -1 0 1 10 x22 -1 1 10 x22 0 20 x13 0 0 0
1 10 x13 0 0 1 10 x13 0 1 10 x13 1 10 z -2 -2 -1 -2 50 -3 -2 -1 60 -1 -1 100 z -2 110 0 2 2 2 -2 2 0 -4 0 0 0 60 z 40 z 0 Az összköltség tehát 110 egység lesz. Az x11x23 változók értékeit sorban visszahelyettesítjük, s így kapjuk, hogy melyik feladóhelyről melyik rendeltetési helyre mennyi árut kell vinni ( x11 = 10, vagyis az 1. feladóhelyről az 1. rendeltetési helyre 10-et kell szállítani ) 10 0 10 Az adatokat behelyettesítjük a szállítási mátrixba : X = 10 20 0 A szállítási feladat nemcsak a szimplex módszerrel oldható meg. Mivel a szimplex módszer alkalmazása – több változó esetén – igencsak időigényes, ezért célszerűbb a disztribúciós módszer alkalmazása. A disztribúció szétosztást jelent A feladóhelyek áruit úgy osztjuk szét a rendeltetési helyek között, hogy a lehető legkisebb költségelemre minél nagyobb árumennyiséget programozzunk. A feladat első megoldása nem biztos,
hogy mindjárt az optimális programot adja, de azt lépésről-lépésre javítva eljutunk a jó megoldáshoz. A disztribúciós módszer : 1. 2. 3. 1. 2. 3. I. 5 2 1 40 II. III 3 4 80 4 3 20 2 5 50 70 40 150150 I. 5 2 1 40 0 II. III 3 4 80 0 4 3 20 2 5 50 10 70 40 150150 0 30 0 I. 5 2 1 40 1. 2. 3. 0 A potenciálok módszere : 0 3 4 v1 v2 v3 0 u1 5 3 4 -1 u2 2 4 3 II. III 3 4 80 0 4 3 20 2 5 50 70 40 150150 0 30 1. 2. 3. I. 5 2 1 40 0 II. III 3 4 80 0 4 3 20 2 5 50 10 70 40 150150 0 30 Miután minden sort kihúztunk, minden oszlopban és sorban a készlet, ill. az igény 0 lett, meg kell vizsgálni, hogy optimális-e a program ? Először a k = n+m-1 képletből meghatározzuk a kritikus számot, ez jelen esetben 5. A kötött elemek száma ezt nem haladja meg. A következő ellenőrzési lépés a potenciálok módszerének felhasználása. Jelöljük a sorokhoz tartozó potenciálokat u1, u2, u3-mal, ezeket írjuk a költségmátrix megfelelő
sorai elé, az oszlopokhoz tartozó potenciálokat a megfelelő oszlopok fölé. A kötött elemeket bekeretezzük. A potenciálok a következő egyenletekből fejezhetők ki : u1+v2=3 u1+v3=4 u2+v3=3 u2+v1=1 u3+v3=5 u1-nek adjunk 0 értéket, ezáltal kifejezhetjük 1 u3 1 2 5 az összes többi változót, amelyek értékeit fel is tüntetjük ( dőlt számok ). A nem kötött elemeknél végezzük el az ellenőrzést, az alábbi képlet alapján : di,k = ci,k – ( u1+v1 ), amennyiben minden nem kötött elem esetében d > 0, a megoldás optimális. Amennyiben valamelyik nem kötött elem esetében d = 0, akkor a feladatnak alternatív optimuma van. A kapott előjeleket az elemek jobb felső sarkában +, -, 0-val jelöljük. A példa c32 eleménél d = -2 ( d = 2 – { 1+3 } = - 2 ), tehát nem az optimális megoldást kaptuk meg. A javítás lehetősége a hurok módszer A hurok módszer : 1. 2. 3. I. 5 2 1 40 II. III 3 4 80 4 3 20 2 5 50 70 40 150150 1. 2. j 3. I. 5 2 1 40
II. III 3 4 80 4 3 20 2 5 50 70 40 150150 A c23 elem nem optimális, mert értéke negatív. A javítás során ennek a cellának kell értéket adni, kötötté kell tenni. Ezt úgy tehetjük meg, hogy egy addig kötött elemről levesszük a hozzá tartozó szállítási mennyiséget. A fenti feltételek egy hurok mentén történő mozgatással teljesíthetők. A hurok egy zárt törtvonal, amely függőlegesen, vagy vízszintesen haladhat és csak kötött elemekhez érve változtathat irányt. A javítás után kapott – most már – optimális elosztás adatait a szállítási mátrixba visszahelyettesítjük, s meghatározzuk a költséget. 34. DIFFERENCIÁLEGYENLETEK TRANSZFORMÁCIÓVAL. MEGOLDÁSA LAPLACE A differenciálegyenletek megoldási módszerei között jelentős szerepet töltenek be azok, amelyek egy bizonyos típusú differenciálegyenlet megoldását algebrai egyenletre vezetik vissza. Az egyik ilyen a Laplace-transzformáció
√(2+2√3)2 = 4; φ = arc sin ( 4/2√3 ) = 60° Komplex szám n-edik gyökének meghatározása : √75+100j =√125 · ( cos ( 53,13°/3 + k·360°/n )+ j·sin ( 53,13°+ k·360°/n )) w1 = 5·( cos ( 17,71° + 0·360°/3 ) +j·sin ( 17,71° + 0·360°/3 ) = 4,76+1,52j w2 = 5·( cos ( 17,71° + 1·360°/3 ) +j·sin ( 17,71° + 1·360°/3 ) = -3,7+3,36j w3 = 5·( cos ( 17,71° + 2·360°/3 ) +j·sin ( 17,71° + 2·360°/3 ) = -1,06-4,89j Komplex szám hatványának meghatározása : (3+4j)2 = 52 ( cos ( 2 · 53,13°) + j · sin ( 2 · 53,13°)) = -7 +24j 3+5. ELEMI ALAPFÜGGVÉNYEK x A függvény két halmaz egyértelmű hozzárendelése. f(x) Df Rf x f(x) = a , ha a > 1 Lineáris függvény f(x) = xa Hatványfüggvény Exponenciális függvény LLooggaarriittm mu ussffüüggggvvéén nyy f(x) = ax + b fff(((xxx))) = = llooggaaa xx,, hhaa aa >> 11 f(x) = ax , ha a < 1 ff(((xxx))) == llooggaaa xx,, hhaa aa << 11 Függvénytani tulajdonságok : 1.
zérushely Az x tengellyel közös pont. F(x) = 0 2. monotonitás Négy lehetősége : szig. mon növekvő f(x1)<f (x2), növekvő f(x1)≤f (x2), szig mon csökk. f(x1)>f (x2), csökkenő f(x1) ≥f (x2) 3. szélsőérték Abszolút maximum, absz. minimum, lokális maximum, lokális minimum 4. paritás ( párosság ) A páros fgv.-ek az y tg-re, a páratlanok az origóra szimmetrikusak 5. periodicitás A fgv. akkor periodikus, ha f(x) = f(x+P) Az abszolútérték a függvényekben f(x) =│x2-4x-5│ f(x) =│x│ -1 5 f(x) = x2-4x-5 A másodfokú fgv. zérushelyei közötti szakaszán az x tengelyre tükrözve veszi fel az értékét. 4. TRIGONOMETRIKUS FÜGGVÉNYEK ÉS INVERZEIK ≤ sin x ≤ 1 1. Sinus függvény -1 per. : 2π 1 -π -π/2 2. Cosinus függvény Df : R Rf : [ -1; 1 ] π/2 π 3π/2 1 -π -π/2 -1 π/2 π 3π/2 -1 3. Tangens függvény 4. Cotangens függvény sinx tgx = cosx -π/2 -1 ≤ cos x ≤ 1 per. : 2π Df : R Rf : [ -1; 1 ] π/2
π 3π/2 -π/2 per. : π Df : R[ π/2+k· π ] Rf : R 5. Sinus hiperbolikus függvény shx = cosx ctgx= sinx ex-e-x 2 7. Tangens hiperbolikus függvény thx = shx / chx π/2 per. : π Df : R[ k· π ] Rf : R 6. Cosinus hiperbolikus függvény chx = ex+e-x 2 8. Cotangens hiperbolikus fgv cthx = chx / shx 9. Az inverzfüggvények ( arc sin x, arc cos x, arc tg x, arc ctg x ) Inverz függvények esetében a hozzárendelés csak kölcsönösen egyértelmű lehet. f-1 arc sin x = 1 / sin x arc cos x = 1 / cos x f -1 arc tg x = 1 / tg x f f arc ctg x = 1 / ctg x f f-1 6. FÜGGVÉNY HATÁRÉRTÉKE, ESETEI 1. Végtelenben vett véges határérték lim f (x) = A x↦± ∞ 2. Végtelenben vett végtelen határérték -∞-ben vett +∞ +∞-ben vett +∞ -∞-ben vett -∞ +∞-ben vett -∞ lim f (x) =± ∞ x↦± ∞ 3. Véges helyen vett végtelen határérték lim f (x) =± ∞ x↦a véges helyen vett -∞ véges helyen vett +∞ Nevezetes határértékek 1
=0 lim n lim 12 = 0 n lim x↦0 Sd 1 lim 1+ n [ sin x =0 x a n= ea = e lim 1+ n n ] [ ] 7. DIFFERENCIA- ÉS DIFFERENCIÁLHÁNYADOS FOGALMA f(x)- f(a) f(a) x-a f(x) A differenciahányados a függvénygörbe egy szelőjének meredekségét adja meg. tg α = f(x)- f(a) =m x-a Ha a differenciahányadosnak az a helyen létezik véges határértéke, akkor ezt a határértéket nevezzük az f függvény a helyhez tartozó differenciálhányadosának. A differenciálhányados a görbe érintőjének meredekségét adja lim x↦a f(x)- f(a) = f ’(a) x-a Ha egy függvény értelmezési tartományának valamely részhalmazának minden pontjában differenciálható, akkor azt mondjuk, hogy a függvény differenciálható ezen a halmazon, és az intervallum pontjaihoz rendelt differenciálhányadosokat az f függvény differenciálhányados függvényének, röviden deriváltjának nevezzük. Függvénygörbe adott pontjának érintője egyenletének meghatározása : P (
x0; y0 ) y – y0 = m ( x - x0 ) y = x2 – 4 , P ( 2; 0 ) me = f’(2) f’(x) = 2x m=4 az egyenlet : y – 0 = 4 ( x – 2 ) vagyis y = 4x – 8 8. DERIVÁLÁSI SZABÁLYOK ALAPFGV-EK DERIVÁLTJAI ( f ∓ g )’ = f’ ∓ g’ ( )= 1 ’ g ( c · f )’ = c · f’ -g’ g2 f ’ g ( )= ( f · g )’ = f’ · g + f · g’ f’ · g – f · g’ g a 2 (n√xa)’= (x n)’= n · xn-1 (xn)’ = n · xn-1 (ax)’ = ax·ln a (ex)’ = a·ex (sin x)’ = cos x (cos x)’ = - sin x [f(g(x))]’ = f’(g)·g’(x) ( 1/x )’ = -1/x2 ( loga x )’ = 1/(x·ln a) (ctg x)’ = 1/sin2 x = 1+ctg2 x (tg x)’ =1/cos2 x = 1+tg2 x (sh x)’ = ch x (ch x)’ = sh x 9. MONOTONITÁS ÉS SZÉLSŐÉRTÉK VIZSGÁLATA A monotonitás vizsgálatához a derivált előjelének ismerete szükséges. A 2x+2 függvény monotonitási vizsgálatának lépései : x2+3 1. a függvény deriválása x x<-3 -3<x<1 x>1 f’ - + - f csökken nő csökken 2. mivel
a nevező értéke mindenképpen pozitív ( x2+3 )2, ezért a számlálónak kell az előjelét vizsgálni 3. a számlálóban a –2x2-4x+6 egyenlőség marad a deriválás után, ezt kell 0-val egyenlővé tenni, s így keresni a gyökeit, ahol f(x)’<0, ott a függvény csökkenő, ahol f(x)’>0, ott a függvény növekvő 4. az egyenlet gyökei x1=-3, x2=1; ezek között a függvény növekszik, a -3-nál kisebb és a 1-nél nagyobb értékeken csökken A szélsőérték helyhez a deriváltnak előjelet kell váltania. A szélsőérték jellegének meghatározásához a második derivált előjelét kell ismerni Ahol az első derivált értéke 0, és van előjelváltás és f(x)’’<0, ott a függvénynek maximuma van, ahol f(x)’’ >0, ott a függvénynek minimuma van y = 2x3-3x2+6 x x<0 x=0 0<x<1 x=1 x>1 D f’ + 0 0 + f nő maximum csökken minimum nő 10. KONVEXITÁS VIZSGÁLATA A második derivált előjele adja meg a konvexitás
kérdésére a választ. Ahol f(x)’’<0, ott a függvény konkáv, ahol f(x)’’ >0, ott a függvény konvex. Az inflexiós hely ott van, ahol f(x)’’ =0. y = x3-x2-x Az első derivált : 3x2-2x-1, x1=1; x2= -1/3 ezeknél az értékeknél van szélsőérték, az x1nél minimum, x2-nél maximum A második derivált : 6x-2 x=1/3 ennél az értéknél van inflexiós hely x x<-1/3 x=-1/3 -1/3<x<1/3 x=1/3 1/3<x<1 x=1 x>1 f(x)’ + 0 - - - 0 + f(x)’’ - konkáv max. - 0 + + konvex min. + f(x) nő infl. hely csökken 11. A FÜGGVÉNYVIZSGÁLAT LÉPÉSEI x2+1 x 1. Értelmezési tartomány meghatározása ( ha nem adott ) Df = R ( 0 ) 2. Zérushely meghatározása ( f(x) = 0 ) Nincs zérushelye, sohasem 0. 3. Határértékek meghatározása az értelmezési tartomány határainál ( + és - ∞, valamint a „lyukaknál” mindkét oldalon ). x2+1 x2+1 lim = +/-∞ lim x↦ ∞ x x = +/-∞ ( az első határértéknél
L’Hospital ! ) x↦ 0 +/- +/- 4. Monotonitás és szélsőérték meghatározása ( f(x)’= 0 ) f’(x) : x2-1/x2, a nevező mindenképpen pozitív, vagyis x2=1, x1= 1, x2=-1 5. Konvexitás, inflexiós hely meghatározása ( f(x)’’= 0 ) f’’(x) : 2/x3, ez nem lehet 0, tehát nincs inflexiós hely 6. Táblázatkészítés 7. Grafikon megrajzolása 2 8. Értékkészlet megállapítása Rf : R ⌉ -2, 2 ⌊ -2 nő 12. A HATÁROZATLAN INTEGRÁL, EGYSZERŰBB INTEGRÁLÁSI FORMULÁK, ALAPFÜGGVÉNYEK INTEGRÁLJAI A differenciálszámítás alapfeladata : adott H halmazon értelmezett függvényhez megkeresni a deriváltat ( derivált függvényt ). Az integrálszámítás feladata fordított : adott egyváltozós valós f függvényhez kell olyan F függvényt meghatározni, amelyre minden x ∈ H esetén F’(x) = f(x). Ha valamely H halmazon F’ = f, akkor az F függvényt az f függvény primitív függvényének nevezzük. Ha F primitív függvénye f-nek, akkor F+C
is primitív függvénye annak, ahol C tetszőleges állandó ( állandó függvény ) Az f függvény primitív függvényeinek összességét f határozatlan integráljának nevezzük / ∫ f(x) dx /. Egy függvénynek végtelen sok primitív függvénye van, amelyek csak állandóban különböznek egymástól. Az f függvény az integrandus, a C állandó az integrációs állandó Egyszerűbb integrálási formulák : 1. Parciális integrálás ( szorzatintegrálás ) 2. Helyettesítéses integrálás 3. Racionális törtfüggvények integrálása 4. Speciális esetek F(ax+b)n+1 +C n dx = f (ax+b) ∫ a·n+1 f +C ∫ f dx = ln│f │+ C ∫ f ·f’ dx = α+1 f’(x) (x) α (x) (x) α+1 Alapfüggvények integráljai : xn+1 ekx ax ∫ xn dx = n+1 + C ∫ ekx dx = k + C ∫ ax dx = ln a + C ∫ 1/x dx = ln│x│+ C ∫ sin x dx = - cos x + C ∫ cos x dx = sin x + C 13. A PARCIÁLIS INTEGRÁLÁS ÉS A RACIONÁLIS TÖRTFÜGGVÉNYEK INTEGRÁLÁSA 1. a parciális
integrálás : ∫ f(x) · g’(x) dx = f(x) · g(x) - ∫ f’(x) · g(x) dx xn ln x ax, sin x ex, cos x ∫ x · ln x dx ► ∫ f(x) · g’(x) dx = f(x) · g(x) - ∫ f’(x) · g(x) dx g’ f f’ = 1/x 2 g= x /2 ln x · x2/2 - ∫ 1/x · x2/2 dx = x2/2 · ln x – x2/4 + C 2. racionális törtfüggvények integrálása : Racionális törtfüggvény határozatlan integrálja racionális ( egész- és tört- ), logaritmus és arc tg függvényekből állhat. Ha a számláló fokszáma nem kisebb a nevező fokszámánál, akkor az osztás elvégzése után a függvény egy polinom és egy valódi törtfüggvény összegeként írható fel ( valódi racionális törtfüggvény; ha a számláló fokszáma nagyobb a nevezőénél, akkor az áltörtfüggvény ). ax2+bx+c 1. dx = ∫ ax + b + c/x dx x ∫ 2. ∫ ∫ ∫ A A · ln│ax + b│ dx = +C ax+b a 9 9 · ln│3x + 1│ dx = +C 3x+1 3 3. a résztörtekre való bontás módszere 1. eset – a nevezőnek vannak
gyökei ( zérushelyei ) x+1 x+1 dx = dx 1. lépés nevező gyöktényezős alakban felírva x3-4x x(x-2)(x+2) ∫ ∫ x+1 A B C = + + 2. lépés felbontás résztörtekre x(x-2)(x+2) x x-2 x+2 x+1 A(x-2)(x+2)+Bx(x+2)+Cx(x-2) = 3. lépés közös nevezőre hozás x(x-2)(x+2) x(x-2)(x+2) x+1=A(x-2)(x+2)+Bx(x+2)+Cx(x-2) 4. lépés a nevezőt elhagyjuk, majd x helyére behelyettesítjük a 0, 2, -2 értékeket. Az egyenleteket sorban megoldva A = -1/4, B = 3/8, C = -1/8. x+1 ∫ x -4x 3 dx = 1 1 3 1 1 1 1 3 1 ∫ (- 4 ⋅ x + 8 ⋅ x-2 - 8 ⋅ x+2 dx )=- 4 1nx+ 8 lnx-2- 8 ln x+2+C 2. eset – a nevezőnek nincs gyöke ( zérushelye ) ∫ ∫ ∫ 5 x2+1 ∫ 1 x2+1 dx = arc tg x + C alak használható x 1 2x 1 ha a számláló elsőfokú, akdx = dx = ln x2+1+ C kor az f’/f alak használható x2+1 2 x2+1 2 5 1 5 5 x 2 dx = 5/4 arc tg x/2 + C dx = x2 +1 dx = 4 2 x +4 4 2 +1 4 ∫ ∫( 4x ∫ x +4 2 ∫ dx = 5 arc tg x + C ) ∫( ) 2x
∫ x +4 dx = 2 ln x +4+ C dx = 2 ∫ 2 2 4x+3 4x 3 dx = 2 + 2 dx = 2 2 x +1 x +1 x +1 ∫ 2x 3 + 2 dx = 2 ln x2+1+ 3 arc tg (x2+1) + C 2 x +1 x +1 14. A határozott integrál fogalma, tulajdonságai, kiszámítása ( Newton-Leibniz formula ) ∫ lim Σ f(ξ )·Δxi = f(x) dx f(x) n↦∞ i=1 f(ξi) a b n i a n Σ f(ξ )·Δxi i=1 i b ξi Δx1, Δx2, Δxi A függvénygörbe alatti terület kiszámításához az a, b intervallumot n részre osztjuk. Az i-edik rész egy tetszőleges pontja ξi, egy elemi cella területe aΔx i és f(ξi) szorzataként adódó téglalap területe. Az f(x) függvény [ a; b ]-on vett határozott integráljának ( Riemann integráljának ) az integrálközelítő összeg határértékét nevezzük, ha az a határérték véges és független a felosztás milyenségétől. A határozott integrál tulajdonságai : b b b ∫a ( f ± g ) = ∫a f ± ∫a g b b b ∫a c · f = c ∫a f a a ∫ f = - ∫bf ∫af = 0
a A határozott integrál kiszámítási szabálya : b ξi (x) a T(x) a ∫ f dx = [F ] = F – F b x Δx b (x) a (b) (a) Newton – Leibniz szabály T = Δx · F(ξi) Ha Δx ↦ 0, akkor T’(x) = f(x) ( azaz T(x) primitív függvénye f(x)-nek ), T(x) = F(x)+ C Az f(x) függvény a és x közötti határozott integrálját számolva ( ez T(x) ) : x ∫ f(x) dx = F(x) + C a ha x = a, akkor F(a) + C = 0 x C = - F(a) ha x = b, akkor ∫ f(x) dx = F(b) – F(a) a 15. A HATÁROZOTT INTEGRÁL ALKALMAZÁSAI AZ IMPROPRIUS INTEGRÁL A határozott integrál alkalmazásai : 1. terület- és térfogatszámítás b d d területszámítás c 1. négyszögek területszámítása a b ∫T∫ f(x,y) dy dx =a∫(c∫f(x,y) dy) dx 2. két függvénygörbe által határolt terület számítása f2 b f1 ∫T∫ f(x,y) dy dx =a∫(f∫f(x,y) dy) dx térfogatszámítás f1 2 f(x) b V = π a∫ [ f(x) ]2 dx Forgáskúpnál r f(x)=m x, tehát m V = π ∫ [ r x ]2
dx 0 m 2. ívhossz számítás 3. forgástestek felszínének kiszámítása 4. mechanikai alkalmazások ( Steiner tétel, I és II rendű nyomatékok ) Az improprius integrál A határozott integrál értelmezése kiterjeszthető olyan esetekre is, amikor az integrációs intervallum végtelen, vagy az integrandus nem korlátos, vagy mindkét eset egyszerre áll fenn. Ilyenkor improprius integrálokról beszélünk +∞ R +∞ c -∞ B ∫ f dx = lim ∫f dx ∫ f dx = ∫ f dx + ∫ f dx = lim ∫ f dx (x) a R ↦+∞ a (x) (x) -∞ (x) -∞ (x) c A ↦-∞ B ↦+∞ A (x) Az improprius integrál kiszámításakor először a primitív függvényt keressük meg, majd a nem véges határ(ok) helyett határértékkel számolunk. 16-17. VEKTOR, VEKTORMŰVELETEK VEKTOR KOORDINÁTÁI MŰVELETEK KOORDINÁTÁK SEGÍTSÉGÉVEL A vektor alatt irányított szakaszt értünk. A vektor megadásához ismernünk kell annak hosszát és irányát. Az irány megadásához
térben két számadatra van szükség, így a vektort három számmal adhatjuk meg. A vektor megadható térbeli koordinátáinak számhármasával is Ha a vektor kezdőpontja a térnek egy meghatározott pontja, akkor kötött vektorról, ellenkező esetben szabad vektorról beszélünk. Az irányított szakasz hosszát a vektor abszolút értékének nevezzük, jelölése│ a│. Ha │a│= 1, akkor az a vektor egységvektor, jelölése a0 Ha │ a│= 0, akkor az a vektor zérusvektor, jelölése 0 Két vektort egyenlőnek tekintünk akkor, ha párhuzamos eltolással egymásba átvihetők ( fedésbe hozhatók ), azaz ha eltolás után kezdőpontjuk egybeesik, és úgyszintén a végpontjuk is. Műveletek : összeadás, kivonás szorzás számmal skaláris szorzás ab = │a│·│b│· cos φ vektoriális szorzás │axb│=│a│·│b│·sin φ Vektorok megadása koordinátákkal. v = v1i + v2j + v3k = ( v1, v2, v3 ) A v1, v2, v3 számokat a vektor i, j, k bázisra
vonatkozó koordinátáinak nevezzük. Vektorműveletek koordináták segítségével a ± b = ( a1±b1, a2±b2, a3±b3 ) a · b = a1b1+a2b2+a3b3 │a│=√ a12+a22+a32 λa = ( λa1, λa2, λa3 ) i j k a x b = a1 a2 a3 = i(a2b3-a3b2)-j(a1b3-a3b1)+k(a1b2-a2b1) b1 b2 b3 18. VEKTOROK ALKALMAZÁSAI EGYENES ÉS SÍK EGYENLETE, MUNKASZÁMÍTÁS A vektorok geometriai alkalmazásai : - két pont távolságának meghatározása vektor vetületvektorának meghatározása egyenes és sík döféspontjának meghatározása pont és sík távolságának meghatározása két sík szögének meghatározása két egyenes szögének meghatározása, merőlegesség kimutatása egyenes és sík szögének meghatározása pont és egyenes távolságának meghatározása két egyenes távolságának meghatározása két sík metszésvonalának meghatározása területszámítás ( pl. háromszög területe ) Az egyenes egyenletének meghatározása P Az egyenes paraméteres vektoregyenlete v P0
r0 r r = r0 + t ⋅ v ( az r vektort megkaphatjuk az r0 és a t paraméterrel megszorzott v vektor összegéből ) A fenti egyenlet bal és jobb oldalán álló vektorok megfelelő koordinátái egymással egyenlők, tehát x = x + at 0 Az egyenes skaláris y = y0 + bt paraméteres vektoregyenlete z = z0 + ct A sík egyenletének meghatározása P n P0 r – r0 r r0 A P0(x0,y0,z0) pontra illeszkedő, az n=(A,B,C) normálvektorra merőleges sík egyenlete : ( r – r0 ) n = 0 [ vagy r⋅n - r0⋅n = 0 ] a skaláris szorzást elvégezve, a sík A(x-x0) + B(y-y0) + C(z-z0) = 0 alakú, általános egyenletéhez jutunk. Munkaszámítás A munkát az erő és az elmozdulás skaláris szorzataként kaphatjuk meg. W=F⋅r P ( 1, -2, 6 ) P0 ( 3, -5, 1 ) F ( 8, 6, 3 ) r = ( x-x0, y-y0, z-z0 ) = ( -2, 3, 5 ) W = -16 + 18 +15 = 17 19. A KÉTVÁLTOZÓS FÜGGVÉNY A PARCIÁLIS DERIVÁLT Kétváltozós valós függvényen olyan függvényt értünk, amelynek értelmezési tartománya
része a R2 halmaznak, értékkészlete pedig része R-nek ( f: R2↦R ). Az f(x,y) = z jelölést bevezetve, a P(x, y, z) pontokból álló halmazt a függvény grafikonjának nevezzük. Ez a ponthalmaz általában egy felületet alkot, ezért azt mondjuk, hogy a kétváltozós függvény felülettel ábrázolható. A felület egyenlete : z = f(x,y), z-t függő változónak, x-et és y-t független változóknak nevezzük. x = konstans y = konstans z = konstans A parciális deriváltat alkalmazzuk a kétváltozós függvények szélsőérték keresésére. D = f’’xx·f’’yy - (f’’xy)2 A parciális derivált ahol D>0, ott van szélsőérték, itt ha f’’xx >0, akkor minimuma van, ha f’’xx<0, akkor maximuma. A többváltozós valós f függvény változói közül egy kivételével az összes többit tekintsük állandónak. Az így keletkező egyváltozós függvény deriválható, ha a kiválasztott változóval a deriválhatóságra vonatkozó
feltételek teljesülnek. A többváltozós függvény valamely változója szerinti deriváltat nevezzük parciális deriváltnak. Jelölése : f’(x), ( ∂f/∂x ) vagy f’(y) ( ∂f/∂y ). A parciális derivált a függvénygörbéből kimetszett vonal meredekségét adja meg. f1 Tiszta másodrendű parciális derivált : f’xx, vagy f’yy f2 y0 x0 Vegyes másodrendű parciális derivált : f’xy, vagy f’yx 20. A VEKTOR-SKALÁR FÜGGVÉNY Az olyan függvényt, amelynek értelmezési tartománya valós számokból, értékkészlete vektorokból áll, vektor-skalár függvénynek nevezzük. Legyen a függvény jele r, t pedig az értelmezési tartomány egy eleme. Ekkor r(t) a függvény t helyen vett helyettesítési értékét jelöli. Ha r koordinátái x, y, z akkor ezek a koordináták t függvényei, így : r(t) = x(t)i + y(t)j + z(t)k Ez az egyenlet egy térgörbe vektoregyenlete. Ennek a térgörbének a skaláris egyenletrendszere : x = x(t); y = y(t); z =
z(t). A vektor-skalár függvény térgörbével ábrázolható, egy térgörbe pedig vektor-skalár függvénnyel írható le A térgörbe egyenletei pontmozgás jellemzésére is használhatók. r(t) Δr = r(t+Δt) – r(t) Δr r(t) lim Δt↦0 r(t+Δt) r(t+Δt)-r(t) = r(t) Δt térgörbe érintő irányú vektora (sebességvektor) A csavarvonal egyenlete : r(t) = cos t · i + sin t · j + t · k t2 ∫ s = │r(t)│ dt A térgörbe ívhossza : t1 t1 s t2 Sebesség, gyorsulás : v=r P an a=r Határozzuk meg az r = ( t, t2, 2/3 t2 ) egyenlettel jellemzett pontmozgás sebesség- és gyorsulásvektorát, a sebességvektor abszolút értékét ! v = r = ( 1, 2t, 2t2 ) a = r = ( 0, 2, 4t ) a sebességvektor abszolút értékének meghatározása ( pályasebesség ) : │v│ = √ 1+4t2+4t4 = 1+ 2t2 21. A SKALÁR-VEKTOR FÜGGVÉNY, SZINTFELÜLET, GRADIENS Az olyan függvény, amelynek értelmezési tartománya vektorokból, értékkészlete valós számokból áll,
skalár-vektor függvényeknek nevezzük. Az u skalár-vektor függvény r helyen vett helyettesítési értékét a szokásos módon u(r) jelöli. Ha r = ( x, y, z ), akkor u(r) felírható u( x, y, z ) alakban is A skalárvektor függvényt szintfelületeivel ábrázoljuk Az u függvény szintfelületét azok az ( x, y, z ) pontok alkotják, amelyekben u( x, y, z ) állandó. Egy-egy szintfelület egyenlete tehát u( x, y, z ) = u0. A skalár-vektor függvény egy háromváltozós függvénnyel egyenértékű. A háromváltozós függvény felfogható olyan függvényként is, amely a tér pontjaihoz egy-egy valós számot rendel A tér pontjai viszont vektorként kezelhetők, így a háromváltozós függvény vektorhoz valós számot rendel Például skalár-vektor függvény az, ha a tér minden egyes pontjához az illető pontbeli hőmérsékletet rendeljük. szintfelületek A skalár-vektor függvény deriváltja a gradiens vektor. Mivel a gradiens vektor merőleges a
szintfelületre, ezért felhasználhatjuk egy felület normálvektorának meghatározására. grad u = grad u elmozdulás vektor szintfelület ∂u ∂u ∂u i+ j+ k ∂x ∂x ∂z Ha bevezetjük a nablavektort ( ▽ ), akkor grad u felírható a ▽ vektornak és az u skalárnak a szorzataként, az alábbi módon : grad u = ▽ u • A nabla vektor megadási módja : ( ▽ ∂ ∂ ∂ , , ∂x ∂y ∂z ) érintősík A gradiens vektor megadja egy függvény maximum változásának irányát is. 22. A VEKTOR-VEKTOR FÜGGVÉNY DIVERGENCIA, ROTÁCIÓ, ÖRVÉNYESSÉG, FORRÁSOSSÁG Az olyan függvényt, amelynek értelmezési tartománya és értékkészlete is vektorokból áll, vektor-vektor függvénynek nevezzük. A fizikai alkalmazásoknál jelentősek az olyan függvények, ahol vektorhoz vektort rendelnek A vektor-vektor függvény megadása három skalár-vektor függvény, v1, v2, v3 megadásával történhet. v(r) = v1( x, y, z ) i + v2 ( x, y, z ) j + v3 ( x, y,
z ) k, vagy v = ( v1, v2, v3 ) A vektor-vektor függvény ábrázolása nehézkes. Az egyik lehetőség az áramvonalakkal történő ábrázolás A vektortér áramvonalai azok a görbék, amelyeknek minden pontjában az érintő iránya megegyezik az illető ponthoz tartozó vektor irányával Másik ábrázolási mód az áramcsővel való ábrázolás Vektor-vektor függvénynyel írható le pl. egy áramló folyadéknak a sebességviszonyai. Itt a tér minden pontjához egy-egy sebességvektort rendelünk. áramvonalak A vektortér örvényesség szempontjából lehet örvényes, vagy örvénymentes ( az örvénymentes vektortér zárt görbe menti integrálja – cirkulációja – 0 ). Forrásosság szempontjából forrásos, vagy forrásmentes ( forrásnak az olyan pontot nevezzük, amelyben új áramvonal keletkezik ). Divergencia : skaláris mennyiség, fizikai jelentése forrássűrűség. div v = ▽ · v = ∂X ∂Y ∂Z + + a forrásmentes vektortér esetén div v =
0 ∂x ∂y ∂z Rotáció : vektormennyiség, fizikai jelentése örvénysűrűség. i j k ∂ ∂ ∂ rot v = ▽x v = az örvénymentes vektortér esetén rot v = 0 ∂x ∂y ∂z x y z 23. A DIFFERENCIÁLEGYENLET ÉS OSZTÁLYOZÁSA SZÉTVÁLASZTHATÓ VÁLTOZÓJÚ DIFFERENCIÁLEGYENLET A differenciálegyenlet olyan egyenlet, amelyben ismeretlen függvények, ezek deriváltjai, valamint független változói fordulnak elő. Ha a differenciálegyenletben egyetlen független változó van, akkor az közönséges differenciálegyenlet, ha kettő vagy több független változó van benne, akkor parciális differenciálegyenlet. A differenciálegyenletek osztályozási szempontjai : - rendűség - lineáris/nemlineáris - homogén/inhomogén - állandó/fgv. együtthatós A differenciálegyenlet rendűségét a benne szereplő derivált rendűsége határozza meg. A lineáris differenciálegyenletben az ismeretlen függvény és annak deriváltjai csak első hatványon fordulnak
elő, s azok szorzatai sem szerepelnek az egyenletben. Ellenkező esetben a differenciálegyenlet nemlineáris. Ha a közönséges differenciálegyenletben van olyan tag, amely állandó, vagy amelyben csak a független változó szerepel, akkor az inhomogén, ha nincs, akkor homogén. Ha a függvényt és deriváltjait tartalmazó tagok együtthatói állandók, akkor állandó együtthatós a differenciálegyenlet A nem állandó együtthatós differenciálegyenletek a függvényegyütthatósak A differenciálegyenlet megoldása alatt olyan függvények keresését értjük, amelyek kielégítik az egyenletet. A közönséges differenciálegyenlet megoldásfüggvényének görbéje az integrálgörbe ( megoldásgörbe ) A közönséges differenciálegyenletnek három megoldását különböztetjük meg : 1. Általános megoldás ( az a fgv, amely pontosan annyi – egymástól független – tetszőleges állandót tartalmaz, ahányad rendű a differenciálegyenlet ) 2. Partikuláris
megoldás ( az a megoldás, amelyet az általános megoldásból úgy származtatunk, hogy az abban szereplő állandó(k)nak meghatározott érték(ek)et adunk ) 3. Szingurális megoldás ( általában nem kapható meg az általános megoldásból, egyik pontjában sem tesz eleget az unicitás feltételének ) Az elsőrendű differenciálegyenletek esetében a közvetlenül integrálható és a szétválasztható változójú egyenleteket különböztethetjük meg. Az első esetre például az y’ = f(x) típusú differenciálegyenlet szolgál. Azok az y’ = f(x,y) differenciálegyenletek, amelyek y’ = f(x) ∙ g(y) alakra hozhatóak, a szeparálható differenciálegyenletek. dy 1. y’ = f(x) ∙ g(y) alakból dx = f(x) ∙ g(y) alakba térünk át 2. a változókat szeparáljuk 3. elvégezzük az integrálást ∫ dy 1 g(y) = f(x) dx ⇛ g(y) dy = f(x) dx ∫ ∫ ∫ 24. ELSŐRENDŰ LINEÁRIS DIFF EGYENLET MEGOLDÁSA Az elsőrendű lineáris differenciálegyenletben az
ismeretlen függvény, s annak deriváltja is első hatványon szerepel, s közöttük szorzókapcsolat sincs. Az elsőrendű lineáris differenciálegyenlet általános alakja : a(x)y’ + b(x)y = k(x) ha k(x) = 0, akkor homogén, ha k(x) ≠ 0, akkor inhomogén A homogén differenciálegyenletet szeparálással és integrálással lehet megoldani. Az inhomogén egyenletet az ún. állandó variálás módszerével ( Lagrangeféle módszer ) oldjuk meg 1. Az a(x)y’ + b(x)y = k(x) egyenletből a zavaró k(x) függvényt elhagyjuk, helyére 0-t írunk. A homogén részt megoldjuk, annak egy ∙ YC (x) ∫ b dx megoldását kapjuk. Ennek általános megoldása : Y = C ∙ e (x) 2. Az inhomogén differenciálegyenlet megoldását az y = C(x) ∙ Y(x) alakban keressük. Az eredeti egyenletbe ezt a homogén y-t helyettesítjük vissza és ebből meghatározzuk a C(x) függvényt. 3. A C(x) függvény integrálással kapott értékét visszahelyettesítjük a homogén részbe, s ezzel
megkapjuk az inhomogén részt. 4. Az inhomogén differenciálegyenlet általános megoldása : y = yI + yH y’ + 2xy = 4x 1. y’ + 2xy = 0 Y = C ∙ e - ∫ 2x dx yH = C(x) ∙ e – x2 2. ( C(x) ∙ e – x2 )’ + 2x ( C(x) ∙ e – x2) = 4x 3. C’(x) ∙e– x2 – C(x) ∙ 2x ∙ e – x2 + 2x ∙ C(x) ∙ e – x2 = 4x 4. C’(x) = 4x ∙ e x2 C(x) = 2 ∫ e x2 ∙ 2x dx 5. yI = 2e x2 ∙ e– x2 = 2 y = yI + yH C’(x) ∙ e –x2 = 4x C(x) = 2e x2 y = C(x) ∙ e – x2 + 2 25. MÁSODRENDŰ MEGOLDÁSA. LINEÁRIS Általános alakjuk a következő : DIFFERENCIÁLEGYENLET ay’’ + by’ + cy = 0 Az a, b, c értékek konstansok, a ≠ 0, y értéke lehet 0, ez a triviális megoldás. 1. Ha az y1 és az y2 függvény megoldása a differenciálegyenletnek ( két gyöke van ), s azok nem konstansszorosok, akkor a differenciálegyenlet minden megoldása Y = C1 ∙ y1 + C2 ∙ y2 alakban írható fel. 2. Ha y = u1(x) + i∙u2(x) [ i2 =-1 ) komplex függvény
megoldása egy differenciálegyenletnek, akkor u1(x) és u2(x) külön-külön szintén megoldás lesz A másodrendű lineáris differenciálegyenlet megoldásához elég két, egymástól független partikuláris megoldást megkeresni, s azután fel lehet írni az általános megoldást. Az y = eλx a kézenfekvő megoldás, az egyenlet partikuláris megoldásait ebben az alakban kell keresni. Ezt behelyettesítve az eredeti egyenletbe, a következő alakhoz jutunk : eλx ( aλ2 + bλ + c ) = 0 a differenciálegyenlet karakterisztikus egyenlete Feladat a λ kisz ámítása [ mivel e λx ≠ 0, ezért az egyenlet csak akkor lehet 2 igaz, ha aλ + bλ + c = 0 ]. A karakterisztikus egyenlet diszkriminánsa szerint három esetet különböztetünk meg : 1. D > 0, két valós gyök van, λ1 és λ 2, ezekez behelyettesítve a következő alakhoz jutunk : Y = C1 ∙ eλ1x + C2 ∙ eλ2x 2. D = 0, egy valós gyök van, y1 = eλx - még egy partikuláris megoldást kell keresni. Ezt az
állandó variálás módszerével megkeresve, y2= x · eλx értékét kapjuk. Behelyettesítve : Y = eλx ( C1 + C2 ∙ x ) 3. D < 0, itt csak konjugált gyökök vannak, az Euler képlet felhasználásával : Y = ex ( C1 cos β x + C2 ∙ sin β x ) [ λ1=+jβ; λ2=-jβ ] 26. KOMBINATORIKA : PERMUTÁCIÓ, VARIÁCIÓ, KOMBINÁCIÓ 1. permutáció : adott n elemet hányféleképpen lehet sorrendbe rakni a./ ismétlés nélküli : ha minden elem különböző Pn = n(n-1)1 = n ! n! k b./ ismétléses : ha vannak azonos elemek Pn = k! 2. variáció : n különböző elemből k db-ot választok ki, úgy hogy a kiválasztás sorrendje lényeges. n! k a./ ismétlés nélküli ( 1 elem 1-szer fordul elő ) Vn = n-k! b./ ismétléses ( 1 elem többször is előfordulhat ) Vnk = nk 3.kombináció : n különböző elemből k db-ot választok ki, a sorrendre való tekintet nélkül k n ( ) n V k a./ ismétlés nélküli Cn = k = k(n-k)! = k!n b./ ismétléses Cn = n+k-1 k (
k ) 27. ESEMÉNY FOGALMA, ESEMÉNYMŰVELETEK A VALÓSZÍNŰSÉG FOGALMA, AXIÓMÁI Egy kísérlet egyes megkülönböztethető véletlentől függő, lehetséges kimeneteleit ( a megfigyelés eredményeit ), elemi eseménynek, az elemi események összességét pedig eseménytérnek nevezzük. Az eseménytér bármely részhalmazát eseménynek nevezzük Egy A esemény elemi esemény akkor, ha nem állítható elő tőle különböző események összegeként. Az eseménytér jelölésére az Ω, vagy a Q használatos, az elemi eseményeket dőlt nagybetűkkel jelöljük. Valamely kísérletnél biztos esemény az, amely a kísérlet során minden esetben bekövetkezik, jele H ( vagy I ). A lehetetlen esemény az, amely a kísérlet során sohasem következhet be, jele Ø. AzΩ teljes eseménytér a biztos eseménynek felel meg, hiszen tartalmazza az összes elemi eseményt A Ø üres halmaz az eseménytér egyetlen elemét sem tartalmazza, ezért akármilyen kimenetele van a
kísérletnek, a Ø esemény nem következhet be. Eseményműveletek : 1. összeg : az az eseményt, amelyben az A vagy B esemény közül legalább az egyik bekövetkezik, jelölés : A ⋃ B, ill. A + B pl. { 1, 2 }⋃{ 2, 3 } = { 1, 2, 3 } 2. különbség : az az esemény, amely akkor következik be, ha az A esemény bekövetkezik, de az B nem, jelölés : AB, ill. A – B pl { 1, 2 }{ 2, 3 } = { 1 } 3. szorzat : az az esemény, amelyben mind az A, mind a B esemény, vagyis mindkettő bekövetkezik, jelölés : A ⋂ B, ill. A · B pl. { 1, 2 }⋂{ 2, 3 } = { 2 } A valószínűségszámítás a véletlen tömegjelenségek vizsgálatával foglalkozik ( véletlen jelenség az , amelynek a végeredményét nem tudjuk pontosan meghatározni; tömegjelenség pedig az azonos körülmények között tetszőlegesen sokszor megismételhető jelenség ). Ha n db kísérlet során vizsgáljuk A esemény bekövetkezését ( k-szor ), az esemény relatív gyakoriságát kapjuk meg : k 0≤k≤n
0≤ k ≤1 n n A tapasztalat azt mutatja, hogy ha egyre több kísérletből álló sorozatból határozzuk meg az A esemény relatív gyakoriságát, akkor a kapott relatív gyakoriságok egyre kisebb mértékben ingadoznak egy rögzített szám körül. Ezt a számot az A esemény valószínűségének nevezzük, s P(A)-val jelöljük. A valószínűség axiómái : 1. egy A esemény valószínűsége 0 ≤ P(A) ≤ 1 2. egy biztos esemény valószínűsége P(H) = 1 lehetetlen esemény valószínűsége P(Ø) = 0 3. két esemény összegének valószínűsége, ha A ∙ B = 0, P(A+B) = P(A) + P(B) 4. A + A = H ( ez biztosan teljesül ), A · A = 0 ( egymást kizárják ) P(A+A) = P(H) P(A)+P(A) = 1 Ø=H P(Ø) = 1 – P(H) = 0 28. VISSZATEVÉSES ÉS VISSZATEVÉS NÉLKÜLI MINTAVÉTEL Az N számú mintából, amelyben k számú hibás elem van, n db elemet kiválasztunk. Annak a valószínűségét keressük, hogy ebből M db hibás lesz N = összes elemek száma k =
jelzettek száma összesen n = a kiválasztott elemek száma M = a jelzettek száma Visszatevés nélküli mintavétel, bármelyik elem kiválasztásának azonos az esélye, mert nem tesszük vissza. M N-M k n-k P(A) = N n ( )( ) ( ) Visszatevéses mintavétel, egy elemet többször is választhatunk, mert viszszatesszük. ( )( ) ( P(A) = n k ) M k N-M n-k k M 29. KLASSZIKUS VALÓSZÍNŰSÉG NEVEZETES DISZKRÉT ELOSZLÁSOK. Ha egy véges sok elemi eseményből állóΩ eseménytér minden eseményéhez egyenlő valószínűség tartozik, azaz az események egyenlően valószínűek, akkor egyenlő valószínűségi mezőről, vagy más szóval klasszikus valószínűségi mezőről beszélünk. HaΩ n elemi eseményből áll, és ezek mindegyike 1/n valószínűségű, akkor egy k számú elemi eseményt tartalmazó A esemény valószínűség k·1/n = k/n, azaz : A elemeinek száma kedvező esetek száma P(A) = = Ω elemeinek száma összes esetek száma Ez a képlet csak a
klasszikus valószínűségi mező esetén használható P(A) kiszámítására ! Nevezetes diszkrét eloszlások : Binomiális eloszlás : Mi annak a valószínűsége, hogy egy kísérletben az A esemény pontosan k-szor következik be ? Annak valószínűsége, hogy n ( n = 1, 2) független kísérletsorozatban az A esemény pontosan k-szor következik be, azaz az A esemény bekövetkezéseinek számát megadó ξ valószínűségi változó xξ értéke éppen k ( tehát ξk = k ) a következő képlettel adható meg : n p(ξ=k) = k ·pk·( 1-p )n-k M(ξ) = np D(ξ) =√ np(1-p) Poisson-eloszlás : A Poisson-eloszlásnál a ξ lehetséges értékeinek halmaza nem véges, hanem végtelen. Az eloszlás : λk p(ξ =k) = · e-λ λ>0 M(ξ) = λ D(ξ) =√ λ k! ( ) Hipergeometriai eloszlás : ez egy visszatevés nélküli mintavételes eloszlás M N-M N-n k n-k p(ξ =k) = M(ξ) = np D2(ξ) =np(1-p) N N-1 n ( )( ) ( ) 30. MÁTRIXOK, VEKTOROK, MŰVELETEK Elemeknek egy
téglalap alakú táblázatban, azon belül sorokban és oszlopokban elrendezett rendszerét mátrixnak nevezzük. a11 a12 a1n A mátrixok általános alakja. Az a11, a12, amn számok ( esetleg függvények ) a mátrix elemei A kettős indexelés az elea21 a22 a2n mek helyét mutatja Az aik elem az i-edik sor k-adik eleme am1 am2 amn A mátrixnak m sora és n oszlopa van, ezért szokás azt mondani, hogy mХn típusú. A mátrix jelölésére vastag nagy betűt használunk, s indexben tüntetjük fel a sorok, oszlopok számát A(m,n). A mátrix oszlopait soraival felcserélve a mátrix transzponáltját kapjuk, jelölései : A*, AT, At, A’. Ha a mátrixnak ugyanannyi sora van, mint oszlopa, akkor kvadratikus mátrixnak nevezzük. Az n sorból és oszlopból álló kvadratikus mátrixról azt mondjuk, hogy n-ed rendű Ha az A kvadratikus mátrix megegyezik a transzponáltjával, vagyis A = A*, akkor A szimmetrikus mátrix. A szimmetrikus mátrix elemei a főátlóra nézve
szimmetrikus elrendezésűek, azaz aik = aki ( a főátlót az a11, a22, ann elemek alkotják ) Ha az A kvadratikus mátrix esetében A = -A*, akkor A ferdén szimmetrikus mátrix. Ha a D kvadratikus mátrix főátlóján kívül valamennyi eleme 0, akkor D átlós, vagy diagonális mátrix. Ha egy diagonális mátrix főátlójában álló valamennyi eleme 1, akkor ezt egységmátrixnak nevezzük A csupa 0-ból álló mátrixot nullamátrixnak nevezzük, jele : 0. A mátrixok körében kitüntetett szerepe van az 1 sorból, v. oszlopból álló mátrixoknak. Ezeket oszlop-, ill sormátrixoknak nevezzük, és vastag kisbetűvel jelöljük ( oszlop-, ill sorvektoroknak is szokás nevezni ) A nagy méretű mátrixokat, particionálni szokták ( szektoa1 a = a2 a* = a1 a2 an rokra bontják ). Két mátrixot csak akkor tekintünk egyenlőnek, ha azonos típusúak és megfean lelő elemeik is azonosak. Műveletek mátrixokkal : 1. összeadás : A + B = ( aik + bik ) mátrixok
összegét úgy képezzük, hogy az azonos helyen álló ( azonos indexű ) elemeket összeadjuk. 2. kivonás : A - B = ( aik - bik ) mátrixok különbségét úgy képezzük, hogy az azonos helyen álló ( azonos indexű ) elemeket egymásból kivonjuk. 3. mátrix szorzása számmal : λA = ( λaik ) mátrixok szorzatát úgy képezzük, hogy a mátrix mindegyik elemét megszorozzuk a számmal. 4. mátrixok szorzása : Az A mátrixnak a B mátrixszal való AB szorzata csak akkor értelmezhető, ha A-nak ( bal oldali tényező ) ugyanannyi oszlopa van, mint ahány sora van B-nek. Ebből következik, hogy az A(m,p) és B(p,n) mátrixok AB szorzata értelmezhető. Az első tényező sorvektorait skalárisan összeszorozzuk a második tényező oszlopvektoraival és a szorzatot a tényezőknek megfelelő helyre írjuk. 3 2 4 5. mátrixok hatványozása : csak kvadratiFALK-FÉLE 2 1 0 kus mátrixok esetén végezhető el. A2 = A · A ELRENDEZÉS 3 5 3 An = A·A n 2 5 1 19 14 11 4 3 6 36
41 34 31. LINEÁRIS TÉR, BÁZIS, BÁZISTRANSZFORMÁCIÓ Az X halmazt lineáris térnek nevezzük, ha értelmezve van benne az összeadás és a számmal való szorzás, továbbá : Pl. lineáris tér a háromdimenaz összeadás : ziós vektorok halmaza is. - kommutatív, azaz a + b = b + a - asszociatív, azaz ( a + b ) + c = a + ( b + c ) - létezik nullaelem ( 0 ), azaz a + 0 = a, minden a-ra - minden a-hoz létezik -a inverz elem, vagyis a + ( - a ) = 0 a számmal való szorzás esetén : - 1·a=a - (βa) = (β)a Az egységvektor : - (+β)a = a + βa e1 ( 1, 0, , 0 ) e2 ( 0, 1, , 0 ) en ( 0, 0, , 1 ) - (a+b) = a + b Az X lineáris tér a, b, c elemeit vektoroknak, az X teret pedig lineáris vektortérnek nevezzük. Az a1, a2, ak vektorrendszert az X lineáris tér generáló rendszerének mondjuk, ha minden x Є X vektor előállítható az a1, a2, ak vektorok lineáris kombinációjaként ( x = 1a1+2a2+kak ). A b1, b2, bk vektorok a lineáris
tér bázisrendszerét ( röviden bázisát ) alkotják, ha lineárisan függetlenek és a lineáris tér minden vektora előállítható e vektorok lineáris kombinációjaként. A b1, b2, bk vektorokat bázisvektoroknak nevezzük Legyen egy X lineáris tér egy bázisa b1, b2, bk Ekkor tetszőleges x Є X vektor egyértelműen állítható elő a bázisvektorok lineáris kombinációjaként. Az x = ξ1b1 + ξ2b2 ++ ξkbk előállításában szereplő ξ számokat az x vektor b1, b2, bk bázisra vonatkozó koordinátáinak nevezzük. Legyen az Ln térnek egy bázisa b1, b2, bn és legyen b a tér egy tetszőleges, 0-tól különböző vektora. A b vektor bevihető bármelyik olyan bk vektor helyére, amelynek együtthatója a b előállításában nem 0. Vagyis a b = β1b1 + β2b2 ++ βkbk előállításában β k ≠ 0, akkor a bk vektor kicserélhető b-re. Az új bázis tehát : b1, b2, bk-1, b, bk+1, bn. Amikor a bázisnak csak egyik vektorát cseréljük ki, akkor elemi
bázistranszformációt hajtunk végre. Egy adott bázisból egy másikba való áttérést bázistranszformációnak nevezünk. a1 = ( 2, -1, 5 ) a2 = ( 5, 0, -7 ) a3 = ( 7, 2, -1 ) a4 = ( 4, 1, 0 ) e1 = ( 1, 0, 0 ) e2 = ( 0, 1, 0 ) e3 = ( 0, 0, 1 ) Régi bázis e1 e2 e3 a1 a2 a3 a4 e1 e2 e3 2 -1 5 5 0 -7 7 2 -1 4 1 0 1 0 0 0 1 0 0 0 1 2-(7·-½ ) generáló ( pivot ) elem ( ≠ 0 ) pivot elem sora pivot elem oszlopa 5-(-1·-½ ) a1 a2 a3 e1 11/2 5 0 a3 -½ 0 1 e3 9/2 -7 0 Új bázis Az a3 és az e2 vektort cseréljük a4 ½ ½ ½ e1 e2 e3 1 -7/2 0 0 ½ ½ 0 0 1 UTASÍTÁS minden elemből kivonjuk a pivotoszlop 1./2 eleme hányadosát minden sort osztunk a pivot elemmel minden elemből kivonjuk a pivotoszlop 3./2 eleme hányadosát a b c ► b c A bázistranszformáció lépései : e1 a1 b1 c1 e1 b1-δ·a1 c1-·c1 1. bázistáblázat készítése, a vektorok koordinátáinak behelyettesítése a megfelelő helyekre e2
a2 b2 c2 e2 b2-δ·a2 c2-·c2 2. a kicserélendő vektorok oszlopa és sora metszéspontjában a generáló ( pivot ) elem kijelölése e3 a3 b3 c3 e3 b3-δ·a3 c3-·c3 3. a pivot elemmel a pivotsor elemeinek osztása, , , stb meghatározása ek ak bk ck a en an bn cn en bn-δ·an cn-·cn bk ck =δ = ak ak 4. a többi elem meghatározása : az eredeti koordinátából kivonjuk az , , hányadosnak a generáló elemmel megegyező koordináta szorzatát A bázistranszformáció felhasználható a lineáris egyenletrendszerek megoldására is. a1 a2 a3 b 2x1 + 5x2 - x3 = 13 2 5 -1 16 x1 - 2x2 + 4x3 = 20 x1∙ 1 + x2 ∙ -2 + x3 ∙ 4 = 20 3x1 - x2 + 2x3 = 15 3 -1 2 15 x1 x2 x3 b x2 x3 b x3 b b x1 2 5 -1 13 5/2 -½ 13/2 2 14 2 x1=2 x2 1 -2 4 20 -9/2 9/2 27/2 -1 -3 3 x2=3 x3 3 -1 2 15 -17/2 7/2 -9/2 -5 -30 6 x3=6 32. LINEÁRIS PROGRAMOZÁS NORMÁL FELADAT MEGOLDÁSA GRAFIKUSAN A lineáris programozás
általános feladata n változós valós lineáris függvények szélsőértékének ( maximumának, vagy minimumának ) keresése lineáris egyenlőtlenségek, valamint rendszerint a változókra vonatkozó nemnegativitási követelmény által meghatározott halmazon ( konvex poliéderen ). A szélsőérték keresésekor nemcsak a függvényérték meghatározása a feladat, hanem annak a helynek a keresése is, ahol a függvény értéke maximális, ill. minimális A gyakorlati feladatok általában a következő alakú lineáris programozási feladatként fogalmazhatók meg – keresendő egy : f(x)=c1x1+c2x2++cnxn lineáris függvény maximuma és legalább 1 maximumhelye. Ez a kanonikus feladat, röviden : max ctx, feltéve hogy Ax≤bmax és x≥0 A LP feladat egy másik formája a standard feladat, ahol keressük : max ctx, feltéve hogy Ax=bmax és x≥0 A GRAFIKUS MEGOLDÁS Egy üzem kétféle terméket gyárt, 3 fajta alapanyagból. Az első termék 1 egységének
gyártásához az első fajta alapanyagból 3 egység, a második alapanyagból 1 egység szükséges A második termék gyártásához az első alapanyagból 1 egység, a második alapanyagból 2 egység, a harmadik fajta alapanyagból 1 egység szükséges Egy hónapra az üzemnek az alapanyagokból rendre 9, 8, 3.5 egységnyi áll rendelkezésére Az első termék piaci ára 3 egységenként, a második terméké 2 egységenként ( az ár 1/100000 része ). Feladat optimális termelési terv készítése. termék 1. termék 2. termék 1. alapanyag 3 1 2. alapanyag 1 2 3. alapanyag 0 1 alapanyag 1. lépés : a 3x1+2x2 egyenletnek tetszőleges értéket adunk, pl 6-ot, s ábrázoljuk ( vékony piros vonal ) 3. lépés : a vékony piros vonallal ábrázolt célfüggvényt párhuzamosan eltoljuk, s abban a pontban, ahol metszi más függvények egyeneseit, lesz a maximumpont 4. lépés : a célfüggvénybe behelyettesítve a koordinátákat, megkapjuk a haszon maximumát,
12-t. A feladat matematikai modellje a következő lineáris programozási feladatként fogalmazódik meg : max ( 3x1+2x2 ), feltéve hogy : 3x1 + x2 ≤ 9 x1 + 2x2 ≤ 8 x1 ≥ 0 x2 ≥ 0 x2 ≤ 3,5 x2 2. lépés : az egyes egyenlőtlenségeknek értéket adva ábrázoljuk a függvényeket. ( 2, 3 ) x1 33. A SZÁLLÍTÁSI FELADAT Gyakori logisztikai probléma, hogy több feladóhelyről kell valamilyen anyagot ugyancsak több rendeltetési helyre szállítani. A szállítási költségek optimalizálására kidolgozott –mátrixot alkalmazó– megoldási mód a szállítási feladat Egy példa : Két állomásról kell három különböző rendeltetési helyre egy bizonyos árucikket elszállítani. Az első állomáson 20, a másodikon 30 egység áll rendelkezésre Az első és a második rendeltetési hely igénye 20-20, a harmadiké 10. Az egy egységre jutó szállítási díjakat a táblázat tartalmazza Jelöljük a keresendő ismeretleneket xik-val, xik jelentse azt,
hogy az i-edik feladóhelyről a k-adik rendeltetési helyre hány egységet szállítottunk. feladóhely rendeltetési hely I. II. III. I. 3 1 4 II. 2 1 5 Az ismeretlenek mátrixa : X= x11 x12 x13 x21 x22 x23 A feladat az X mátrix elemeinek és a minimális összköltségnek ( z ) a meghatározása. Egy újabb mátrixban most már feltüntetjük a költségmátrix adatain kívül a feladóhelyek kapacitásait és a rendeltetési helyek igényeit is : rendeltetési helyek I. II. III. I. 3 1 4 20 II. 2 1 5 30 feladóhelyek kapacitásai rendeltetési helyek igényei 20 20 10 50 megegyezik az igény és a készlet feladóhelyek A szállítási mátrix soraiból és oszlopaiból az alábbi egyenleteket írhatjuk fel : x11 + x12 + x13 x21 x11 + x22 + x23 x21 x12 + x22 x13 3x11 + + x12 + + 4x13 + 2x21 + x23 x22 = 20 = 30 = 20 = 20 = 10 Ez a szállítási költségek összegeinek minimuma, a célfüggvény. + 5x23 min. Ha
megfordítjuk a feladatot ( -1-szeresét vesszük ), normál feladatra vezethetjük vissza. Ekkor : - z = -3x11 - x12 - 4x13 - 2x21 - x22 - 5x23 max Ezt a feladatot bázistranszformációval oldhatjuk meg ( ld. a következő oldal ) A szimplex módszer. B0 x11 x12 x13 x21 x22 x23 B0 x11 x12 x21 x22 x23 û1 1 1 1 0 0 0 20 û1 1 1 0 0 -1 10 û2 0 0 0 1 1 1 30 û2 0 0 1 1 1 30 û3 1 0 0 1 0 0 20 û3 1 0 1 0 0 20 û4 0 1 0 0 1 0 20 û4 0 1 0 1 0 20 û5 0 0 1 0 0 1 10 x13 0 0 0 0 1 10 z -3 -1 -4 -2 -1 -5 0 z -3 -1 -2 -1 -1 40 2 2 2 2 2 2 100 2 2 2 2 0 80 B0 x11 x21 x22 x23 B0 x11 x21 x23 B0 x11 x23 B0 x23 x12 1 0 0 -1 10 x12 1 0 -1 10 x12 1 -1 10 x11 -1 10 û2 0 1 1 1 30 û2 1 1 0 20 x21 1 0 20 x21 1 10 û3 1 1 0 0 20 û3 1 1 0 20 û3 0 0 0 û3 0 0 û4 -1 0 1 1 10 x22 -1 0 1 10 x22 -1 1 10 x22 0 20 x13 0 0 0
1 10 x13 0 0 1 10 x13 0 1 10 x13 1 10 z -2 -2 -1 -2 50 -3 -2 -1 60 -1 -1 100 z -2 110 0 2 2 2 -2 2 0 -4 0 0 0 60 z 40 z 0 Az összköltség tehát 110 egység lesz. Az x11x23 változók értékeit sorban visszahelyettesítjük, s így kapjuk, hogy melyik feladóhelyről melyik rendeltetési helyre mennyi árut kell vinni ( x11 = 10, vagyis az 1. feladóhelyről az 1. rendeltetési helyre 10-et kell szállítani ) 10 0 10 Az adatokat behelyettesítjük a szállítási mátrixba : X = 10 20 0 A szállítási feladat nemcsak a szimplex módszerrel oldható meg. Mivel a szimplex módszer alkalmazása – több változó esetén – igencsak időigényes, ezért célszerűbb a disztribúciós módszer alkalmazása. A disztribúció szétosztást jelent A feladóhelyek áruit úgy osztjuk szét a rendeltetési helyek között, hogy a lehető legkisebb költségelemre minél nagyobb árumennyiséget programozzunk. A feladat első megoldása nem biztos,
hogy mindjárt az optimális programot adja, de azt lépésről-lépésre javítva eljutunk a jó megoldáshoz. A disztribúciós módszer : 1. 2. 3. 1. 2. 3. I. 5 2 1 40 II. III 3 4 80 4 3 20 2 5 50 70 40 150150 I. 5 2 1 40 0 II. III 3 4 80 0 4 3 20 2 5 50 10 70 40 150150 0 30 0 I. 5 2 1 40 1. 2. 3. 0 A potenciálok módszere : 0 3 4 v1 v2 v3 0 u1 5 3 4 -1 u2 2 4 3 II. III 3 4 80 0 4 3 20 2 5 50 70 40 150150 0 30 1. 2. 3. I. 5 2 1 40 0 II. III 3 4 80 0 4 3 20 2 5 50 10 70 40 150150 0 30 Miután minden sort kihúztunk, minden oszlopban és sorban a készlet, ill. az igény 0 lett, meg kell vizsgálni, hogy optimális-e a program ? Először a k = n+m-1 képletből meghatározzuk a kritikus számot, ez jelen esetben 5. A kötött elemek száma ezt nem haladja meg. A következő ellenőrzési lépés a potenciálok módszerének felhasználása. Jelöljük a sorokhoz tartozó potenciálokat u1, u2, u3-mal, ezeket írjuk a költségmátrix megfelelő
sorai elé, az oszlopokhoz tartozó potenciálokat a megfelelő oszlopok fölé. A kötött elemeket bekeretezzük. A potenciálok a következő egyenletekből fejezhetők ki : u1+v2=3 u1+v3=4 u2+v3=3 u2+v1=1 u3+v3=5 u1-nek adjunk 0 értéket, ezáltal kifejezhetjük 1 u3 1 2 5 az összes többi változót, amelyek értékeit fel is tüntetjük ( dőlt számok ). A nem kötött elemeknél végezzük el az ellenőrzést, az alábbi képlet alapján : di,k = ci,k – ( u1+v1 ), amennyiben minden nem kötött elem esetében d > 0, a megoldás optimális. Amennyiben valamelyik nem kötött elem esetében d = 0, akkor a feladatnak alternatív optimuma van. A kapott előjeleket az elemek jobb felső sarkában +, -, 0-val jelöljük. A példa c32 eleménél d = -2 ( d = 2 – { 1+3 } = - 2 ), tehát nem az optimális megoldást kaptuk meg. A javítás lehetősége a hurok módszer A hurok módszer : 1. 2. 3. I. 5 2 1 40 II. III 3 4 80 4 3 20 2 5 50 70 40 150150 1. 2. j 3. I. 5 2 1 40
II. III 3 4 80 4 3 20 2 5 50 70 40 150150 A c23 elem nem optimális, mert értéke negatív. A javítás során ennek a cellának kell értéket adni, kötötté kell tenni. Ezt úgy tehetjük meg, hogy egy addig kötött elemről levesszük a hozzá tartozó szállítási mennyiséget. A fenti feltételek egy hurok mentén történő mozgatással teljesíthetők. A hurok egy zárt törtvonal, amely függőlegesen, vagy vízszintesen haladhat és csak kötött elemekhez érve változtathat irányt. A javítás után kapott – most már – optimális elosztás adatait a szállítási mátrixba visszahelyettesítjük, s meghatározzuk a költséget. 34. DIFFERENCIÁLEGYENLETEK TRANSZFORMÁCIÓVAL. MEGOLDÁSA LAPLACE A differenciálegyenletek megoldási módszerei között jelentős szerepet töltenek be azok, amelyek egy bizonyos típusú differenciálegyenlet megoldását algebrai egyenletre vezetik vissza. Az egyik ilyen a Laplace-transzformáció
 When reading, most of us just let a story wash over us, getting lost in the world of the book rather than paying attention to the individual elements of the plot or writing. However, in English class, our teachers ask us to look at the mechanics of the writing.
When reading, most of us just let a story wash over us, getting lost in the world of the book rather than paying attention to the individual elements of the plot or writing. However, in English class, our teachers ask us to look at the mechanics of the writing.