Comments
No comments yet. You can be the first!





Content extract
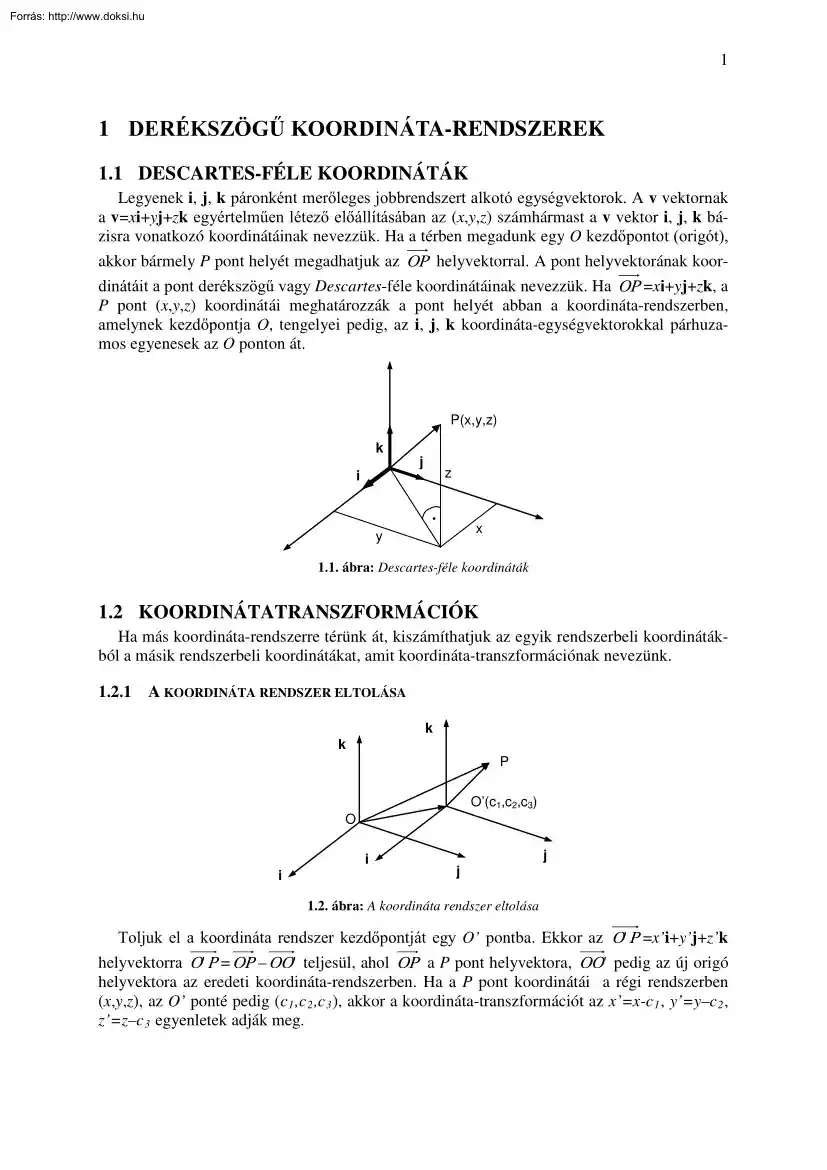
1 1 DERÉKSZÖGŰ KOORDINÁTA-RENDSZEREK 1.1 DESCARTES-FÉLE KOORDINÁTÁK Legyenek i, j, k páronként merőleges jobbrendszert alkotó egységvektorok. A v vektornak a v=xi+yj+zk egyértelműen létező előállításában az (x,y,z) számhármast a v vektor i, j, k bázisra vonatkozó koordinátáinak nevezzük. Ha a térben megadunk egy O kezdőpontot (origót), akkor bármely P pont helyét megadhatjuk az OP helyvektorral. A pont helyvektorának koordinátáit a pont derékszögű vagy Descartes-féle koordinátáinak nevezzük Ha OP =xi+yj+zk, a P pont (x,y,z) koordinátái meghatározzák a pont helyét abban a koordináta-rendszerben, amelynek kezdőpontja O, tengelyei pedig, az i, j, k koordináta-egységvektorokkal párhuzamos egyenesek az O ponton át. P(x,y,z) k j z i . x y 1.1 ábra: Descartes-féle koordináták 1.2 KOORDINÁTATRANSZFORMÁCIÓK Ha más koordináta-rendszerre térünk át, kiszámíthatjuk az egyik rendszerbeli koordinátákból a másik
rendszerbeli koordinátákat, amit koordináta-transzformációnak nevezünk. 1.21 A KOORDINÁTA RENDSZER ELTOLÁSA k k P O’(c1,c2,c3) O i i j j 1.2 ábra: A koordináta rendszer eltolása Toljuk el a koordináta rendszer kezdőpontját egy O’ pontba. Ekkor az O' P =x’i+y’j+z’k helyvektorra O' P = OP – OO' teljesül, ahol OP a P pont helyvektora, OO' pedig az új origó helyvektora az eredeti koordináta-rendszerben. Ha a P pont koordinátái a régi rendszerben (x,y,z), az O’ ponté pedig (c 1 ,c 2 ,c 3 ), akkor a koordináta-transzformációt az x’=x-c 1 , y’=y–c 2 , z’=z–c 3 egyenletek adják meg. 2 1.22 A KOORDINÁTA-RENDSZER ELFORGATÁSA Válasszunk három új, egymásra páronként merőleges jobbrendszert alkotó egységvektort bázisvektornak, miközben az origó helyben marad. Legyenek e 1 , e 2 , e 3 az új koordinátaegységvektorok a régi bázisban a következőképpen kifejezve: e m =a 1m i+a 2m j+a 3m k m=1,2,3 Az
együtthatókat egy mátrixba írjuk, amelyet a bázistranszformáció mátrixának nevezünk: a 11 a 12 a 13 A = a 21 a 22 a 23 a 31 a 32 a 33 vagy tömörebb formában írva: A = [e1 e2 e3 ] . Ha a P pont koordinátáit az eredeti i, j, k bázisban (x,y,z), az új e 1 , e 2 , e 3 bázisban pedig (u,v,w) jelöli, akkor OP = ue 1 +ve 2 +we 3 =u(a 11 i+a 21 j+a 31 k)+v(a 12 i+a 22 j+a 32 k)+w(a 13 i+a 23 j+a 33 k) másrészt OP =xi+yj+zk Az i, j, k vektorok együtthatóinak összehasonlításával x=a 11 u+a 12 v+a 13 w y=a 21 u+a 22 v+a 23 w z=a 31 u+a 32 v+a 33 w adódik. Tömörebb formában: u x y = A⋅ v w z Mivel a bázistranszformáció mátrixának determinánsa az e 1 , e 2 , e 3 oszlopvektorok lineáris függetlensége miatt nem zérus, létezik az inverze. Az inverz pedig az oszlopvektorok ortonormáltsága miatt a mátrix transzponáltja, ezért a pont koordinátái
az új rendszerben az x u v = A* ⋅ y z w egyenletekkel számíthatók ki, ahol A* az A transzponáltját jelöli. 1.23 A HOSSZEGYSÉGEK MEGVÁLTOZTATÁSA A KOORDINÁTATENGELYEKEN (SKÁLÁZÁS) Legyen az új koordináta-rendszer kezdőpontja ugyanaz mint az eredetié, a koordináta egységvektorok pedig az i, j, k vektorokkal egyirányúak. Ekkor e 2 =q y j, e 3 =q z k, q x >0, q y >0, q z >0. e 1 =q x i, Kiszámítjuk az i, j, k rendszerben adott P(x,y,z) pont koordinátáit az új koordináta rendszerben. Mivel OP = ue 1 +ve 2 +we 3 =uq x i+vq y j+wq z k) a régi és az új koordináták között a következő összefüggéseket kapjuk x=q x u, y=q y v, z=q z w 3 1.24 ÖSSZETETT TRANSZFORMÁCIÓK Általános esetben, ha a koordináta-rendszert eltoljuk, elforgatjuk és a tengelyeken a léptéket is megváltoztatjuk, a koordináta-transzformációt e transzformációk egymás után való
elvégzésével számíthatjuk ki. Az új koordináta-rendszerből a régibe való átszámításra az q x u c1 x y = A ⋅ q v + c y 2 q z w c3 z egyenleteket kapjuk, ahol az A mátrix oszlopaiban az új bázisvektoroknak az eredeti bázisra vonatkozó koordinátái állnak. Az u, v, w innen úgy számítható ki, hogy c 1 , c 2 , c 3 mindkét oldalból való kivonása után mindkét oldalt az A-1=A* mátrixszal balról megszorozzuk, majd a megfelelő q x , q y , q z tényezőkkel átszorzunk. 1.3 HOMOGÉN KOORDINÁTÁK x3 * P V y x P * V O x1 x2 1.3 ábra: A sík pontjainak homogén koordinátái Csatoljunk az x, y derékszögű koordináta-rendszerhez egy olyan térbeli derékszögű koordináta-rendszert, amelynek x 1 , x 2 tengelyei az x, y tengelyekkel párhuzamosak, x 3 tengelyének az egységpontja pedig az eredeti x, y koordináta-rendszer kezdőpontja. Az
xy-sík bármely P pontját megadhatjuk az O ponton áthaladó OP egyenessel, vagy ami ugyanaz, az OP* egyenessel úgy, hogy az egyenesnek az xy-síkkal alkotott döféspontja jelöli ki a szóban forgó pontot. Minden olyan egyenes pedig, amely az xy-síkot metszi, megadható egy olyan OP * (x 1 ,x 2 ,x 3 ) vektorral, amelyre x 3 ≠0. Ezt az [x 1 ,x 2 ,x 3 ] koordinátahármast a P pont homogén koordinátáinak nevezzük. A pont homogén koordinátáit egy zérustól különböző λ számmal megszorozhatjuk, hiszen a (λx 1 ,λx 2 ,λx 3 ) koordinátájú vektor ugyanazt az egyenest, és ezáltal ugyanazt a P pontot határozza meg, mint az (x 1 ,x 2 ,x 3 ) koordinátájú vektor Az x 1 , x 2 , x 3 koordináta-rendszer x 1 , x 2 síkjában adott OV * (v 1 ,v 2 ,0) vektor egyenese nem metszi az xy-síkot. Az ilyen [v 1 ,v 2 ,0] homogén koordinátahármasnak az xy-sík (v 1 ,v 2 ) vektorát tudjuk megfeleltetni. Ha ezzel a (v 1 ,v 2 ) vektorral párhuzamos egyenesekhez egy
„ideális pontot” (V) rendelünk, akkor azt mondjuk, hogy [v 1 ,v 2 ,0] ennek a V ideális pontnak a homogén koordinátái. Két egyeneshez akkor és csak akkor rendeljük ugyanazt az ideális pontot, ha két egyenes párhuzamos. Ily módon az ideális pontokkal kibővített sík bármely két egyenesének egyetlen közös pontja van. A sík ideális pontjainak összessége a sík ideális egyenesét alkotja Az ideális pontokkal kibővített euklideszi síkot projektív síknak nevezik. A zérusvektor nem határoz meg egyenest, ezért egy pont homogén koordinátáinak mindegyike nem lehet 0. Egyébként minden számhármas egyetlen pontot határoz meg, az [x 1 ,x 2 ,0] 4 típusúak ideális, az [x 1 ,x 2 ,x 3 ] (x 3 ≠0) típusúak pedig „közönséges” pontokat. Az ideális pontoknak nincsenek Descartes-féle koordinátái, a közönséges pontok homogén és Descartes-féle koordinátáira x 1 :x 2 :x 3 =x:y:1 teljesül. 5 2 TÉRBELI ALAKZATOK TRANSZFORMÁCIÓI
2.1 LINEÁRIS TARNSZFORMÁCIÓK, PONTTRANSZFORMÁCIÓK A háromdimenziós vektortérnek olyan A leképezéseiről van szó, amelyek minden v vektorhoz egy egyértelműen meghatározott Av „képteret” rendelnek és lineárisak, vagyis két tetszőleges u, v vektorra és tetszőleges c valós számra A(u+v)=A(u)+A(v) A(cu)=cA(u) teljesül. Írjuk fel a lineáris leképezést egy e 1 , e 2 , e 3 bázisban Ha v=xe 1 +ye 2 +ze 3 , akkor a fenti tulajdonság miatt Av=xAe 1 +yAe 2 +zAe 3 Legyen Ae i =a 1i e 1 +a 2i e 2 +a 3i e 3 (i=1,2,3) hiszen a bázisvektorok képe is vektor, ezért felírhatók e 1 , e 2 , e 3 lineáris kombinációjaként. Innen Av=x(a 11 e 1 +a 21 e 2 +a 31 e 3 )+y(a 12 e 1 +a 22 e 2 +a 32 e 3 )+z(a 13 e 1 +a 23 e 2 +a 33 e 3 ) adódik. Rendezzük a jobb oldalt e 1 , e 2 , e 3 szerint, az együtthatók éppen az Av vektor koordinátái lesznek: x’=a 11 x+a 12 y+a 13 z y’=a 21 x+a 22 y+a 23 z z’=a 31 x+a 32 y+a 33 z Ebből azt látjuk, hogy az A lineáris
leképezésnek az adott e 1 , e 2 , e 3 bázisban egy mátrix felel meg: a 11 a 12 a 13 A = a 21 a 22 a 23 a 31 a 32 a 33 A mátrix oszlopaiban a bázisvektorok képei állnak. Megfordítva az teljesül, hogy minden 3x3-as mátrix egy adott bázisban a háromdimenziós vektorok terén egy lineáris leképezés mátrixának tekinthető. Az eddigiekből következik, hogy egy lineáris leképezés mátrixát egy adott bázisban fel tudjuk írni, ha ismerjük a bázisvektorok képét. A mátrix ismeretében pedig bármely további vektor képe meghatározható. Ha egy vektor képére újabb lineáris transzformációt alkalmazunk, vagyis v’=Av és v’’=Bv’, akkor v’’=B(Av) összetett transzformáció mátrixa a BA szorzatmátrix. Ezt a tényt úgy is megfogalmazhatjuk, hogy lineáris transzformációk szorzata ismét lineáris transzformáció. Invertálhatónak nevezzük a lineáris transzformációt, ha kölcsönösen egyértelmű
megfeleltetést létesít a vektortér és a képtér elemei között. Ezzel ekvivalens, hogy Av=0 egyenletből v=0 következik. Az ilyen transzformációnak van inverze, amelynek mátrixa A-1 Az invertálható lineáris transzformáció mátrixának oszlopvektorai lineárisan független vektorok Ha egy lineáris transzformáció nem invertálható, akkor elfajulónak nevezzük. Az elfajuló transzformáció képterének dimenziója kisebb mint 3. 2.2 EGYENES KÖRÜLI FORGATÁS Forgassuk el a tér pontjait a koordináta-rendszer z tengelye körül pozitív irányban ϕ szöggel. Ezután számítsuk ki a koordináta-egységvektorok elforgatottjának koordinátáit: 6 y ϕ j Fi Fj ϕ z x i 2.1 ábra: Forgatás a z tengely körül Fi=cos ϕ i+sin ϕ j Fj=-sin ϕ i+cos ϕ j Fk=k Ezért cos ϕ F = sin ϕ 0 − sin ϕ cos ϕ 0 0 0 1 2.3 SÍKRA VONATKOZÓ TÜKRÖZÉS Tükrözzük a tér pontjait egy olyan α síkra, amely a z tengelyt
tartalmazza, és az xzkoordinátasíkkal ϕ szöget alkot. Ha a transzformáció mátrixát T jelöli, Tk=k teljesül, mivel a z tengely tükörképe önmaga. Ti j α ϕ ϕ 90°–2 ϕ Tj 2.2 ábra: Tükrözés azα síkra Ti=cos2 ϕ i+sin2 ϕ j Tj=sin2 ϕ i–cos2 ϕ j Ezért i 7 cos 2ϕ sin 2ϕ 0 F = sin 2ϕ − cos 2ϕ 0 0 0 1 A síkra vonatkozó tükrözés ortogonális irányításváltó transzformáció, amely egy ortonormált jobbsodrású bázist ortonormált balsodrásúba visz át. A mátrix inverze a transzponáltja és determinánsának értéke –1 2.4 NYÚJTÁS, ZSUGORÍTÁS A KOORDINÁTATENGELYEK IRÁNYÁBAN Ezt a transzformációt úgy definiáljuk, hogy egy tetszőleges P(x,y,z) pont koordinátáit rendre megszorozzuk a q 1 >0, q 2 >0 és q 3 >0 nyújtási tényezőkkel. A transzformáció mátrixát megkapjuk, ha oszlopaiba a megnyújtott bázisvektorokat írjuk, azaz q1 0 0 N = 0 q 2 0 0
0 q3 Ha q 1 = q 2 =q 3 =q, akkor speciális esetként az origó középpontú q arányú hasonlósági leképezésről van szó, amelynek mátrixa q 0 0 H = 0 q 0 0 0 q 2.5 MERŐLEGES VETÍTÉS 2.51 VETÍTÉS A KOORDINÁTASÍKOKRA Vetítsük a tér pontjait az xy-koordinátasíkra. Mivel az i és j bázisvektorok vetülete önmaga, a k vetülete pedig zérus vektor, a vetítés mátrixa a következő: 1 0 0 Vxy = 0 1 0 0 0 0 Hasonlóképpen írhatjuk fel az yz-koordinátasíkra való x-irányú vetítés 0 0 0 Vyz = 0 1 0 0 0 1 mátrixát és az xz-koordinátasíkra való y-irányú vetítés 1 0 0 Vxz = 0 0 0 0 0 0 mátrixát. 2.52 MERŐLEGES VETÍTÉS ORIGÓN ÁTHALADÓ ÁLTALÁNOS HELYZETŰ SÍKRA Ezt a feladatot visszavezethetjük az xy-koordinátasíkra való merőleges vetítésre úgy, hogy először elforgatjuk a koordináta rendszert olyan
helyzetbe, hogy az xy-sík az adott általános 8 helyzetű síkba kerüljön. Ebben a helyzetben végrehajtjuk a z tengely irányából való vetítést, majd visszatérünk az eredeti koordináta rendszerbe. Az általános helyzetű képsík állását a rá merőleges vetítési irány megadásával határozzuk meg. A vetítési irányt két szöggel adjuk meg: a z tengellyel bezárt szög legyen ϑ , az xy-síkra való merőleges vetületének az x tengelylyel bezárt szöge legyen ϕ . Ezek a szögek tulajdonképpen a vetítési irány egységvektorának polárkoordinátái. A vetítési iránnyal ellentétes irányú egységvektor lesz az e 3 új bázisvektora 2.3 ábra: Merőleges vetítés az [e 1 ,e 2 ] síkra Megállapítható, hogy e 3 =sin ϑ cos ϕ i+ sin ϑ sin ϕ j+cos ϑ k. Az e 3 -ra merőleges képsíkban az új koordináta-egységvektorokat szabadon választhatjuk meg. A koordináta-transzformáció mátrixa a következő: − sin ϕ − cos ϑ cos ϕ sin ϑ
cos ϕ A = cos ϕ − cos ϑ sin ϕ sin ϑ sin ϕ 0 sin ϑ cos ϑ Mivel A ortogonális mátrix, A-1=A*. Az e 1 és e 2 bázisvektorok síkjára való merőleges vetítés mátrixa az e 1 , e 2 , e 3 bázisban 1 0 0 V = 0 1 0 0 0 0 Egy tetszőlegyes P pont koordinátáit az e 1 , e 2 , e 3 bázisban az x * A ⋅ y z mátrixszorzással kapjuk. Ezekre az új koordinátákra kell alkalmazni a V mátrixú vetítést, majd az A bázistranszformációval visszaszámolni a vetület koordinátáit az eredeti koordinátarendszerbe. Ha P vetületét P’(x’,y’,z’) jelöli, akkor x x' y' = A⋅ V ⋅ A* ⋅ y z z' A képsík koordináta-rendszerében, amelynek koodrináta-egységvektorai e 1 és e 2 , az e 3 pedig az a vetítési irányt adja meg, a tárgy körüljárása az e 2 körüli ϕ szöggel való
forgatást, a 9 vetítési iránynak az [e 2 ,e 3 ] síkban történő változtatása pedig e 1 körüli ϑ szöggel való forgatást jelenti. 2.6 PONTTRANSZFORMÁCIÓK FELÍRÁSA HOMOGÉN KOORDINÁTÁKKAL A homogén koordináták segítségével olyan transzformációk mátrixát írhatjuk fel, amelyek egy, az origót helyben hagyó lineáris transzformáció és egy eltolás egymás utáni végrehajtásának felelnek meg. Ezeket affin transzformációknak nevezik Végezzük el a háromdimenziós euklideszi térben a (d x ,d y ,d z ) vektorral való eltolást. A P(x,y,z) pont képe ekkor az x’=x+ d x , y’=y+ d y , z’=z+ d z koordinátájú pont lesz. Homogén koordinátákkal ugyanez az eltolás a d x x x' 1 y' 1 d y y = ⋅ z' 1 d z z 1 1 1 mátrixszorzással írható fel. Az A transzformáció mátrixa homogén
koordináta-rendszerben 0 kA 0 0 0 0 0 k alakú lesz, ezért az A transzformáció és az eltolás kompozíciója a d1 d A d 2 4 d3 0 0 0 d 4 mátrixszal számítható ki, melyre d x :d y :d z :1= d 1 :d 2 :d 3 :d 4 A homogén koordináták használatának egyik előnye, hogy az eltolás is mátrixszorzással számítható ki. Másik előnye az, hogy a numerikus számolás kiegyensúlyozottabbá tehető az adatok kedvezőtlen nagyságrendje esetén. 10 3 FELÜLETEK MEGHATÁROZÓ ADATAI ÉS ELŐÁLLÍTÁSA 3.1 CSAVARFELÜLETEK Egy pont csavarmozgást végez, ha egy tengely körül állandó szögsebességgel forog, és ugyanakkor a tengely irányában állandó sebességgel halad. A pont pályagörbéje hengeres csavarvonal, amelynek tetszőleges pontja az x(t)=acost, y(t)=asint, z(t)=ct, (–∞<t<+∞) koordinátafüggvényekkel adható meg. A t változó az elfordulás szöge, a a
henger sugara, c pedig az 1 radián szögelforduláshoz tartozó menetemelkedés. A csavarvonal menetmagassága c2π. A csavarmozgást végző szakasz csavarfelületen mozog 3.1 ábra: Hengeres csavarvonal A csavarfelületek alakja nagyon változatos aszerint, hogy a szakasz a csavarmozgás tengelyéhez viszonyítva milyen helyzetű. Ha a szakasz egyenese a tengelyre merőleges, akkor laposmenetű, egyébként élesmenetű csavarfelületen mozog. Ha a csavar felülete metszi a tengelyt, akkor zárt, egyébként nyitott csavarfelület keletkezik 3.2 FORGÁSFELÜLETEK 3.2 ábra: Forgásfelület származtatása Egy forgásfelület meghatározásához egy forgástengelyt és egy meridiángörbét kell megadni úgy, hogy a meridiángörbe és a tengely ugyanabban a síkban legyen, és a görbe ne metssze a tengelyt. Ha a meridiángörbe minden pontját a tengely körül egy meghatározott szöggel elforgatjuk, forgásfelületet kapunk. A teljes forgásfelület a t forgásszög [0,2π]
intervallumához tartozik, ekkor a meridiángörbe minden pontja egy tengelyre merőleges síkú kört ír le 11 3.3 ÁLTALÁNOS HENGERFELÜLETEK Az általános hengerfelületet vezérgörbéje és alkotóvektora határozza meg. A vezérgörbe egy tetszőleges síkgörbe, és az alkotó nem párhuzamos a görbe síkjával. 3.3 ábra: Általános hengerfelület Ezekből az adatokból a felületet úgy állítjuk elő, hogy a vezérgörbe minden pontján át az alkotóval párhuzamos egyenest húzunk. Így végtelen hengerfelületet kapunk Ha a vezérgörbe sokszög, akkor a hengerfelület származtatásával egy végtelen hasáb palástjához jutunk. Ha a vezérgörbe kör és az alkotóvektor merőleges a kör síkjára, akkor egyenes körhengerfelületet kapunk. A szokásos értelemben ha hengerről beszélünk, nem a végtelen hengerfelületre gondolunk, hanem annak a két vezérgörbe közé eső darabjára A lezáró véglapok azonban nem tartoznak a hengerfelülethez. 3.4
ÁLTALÁNOS KÚPFELÜLETEK 3.4 ábra: Általános kúpfelület Az általános kúpfelületet vezérgörbéje és csúcspontja határozza meg. A vezérgörbe egy tetszőleges síkgörbe, és a csúcspont a görbe síkján kívül van. Ezekből az adatokból a felületet úgy állítjuk elő, hogy a vezérgörbe minden pontján át a csúcsponton áthaladó egyenest illesztünk. Így egy végtelen kettős kúpfelület keletkezik Ha a vezérgörbe sokszög, akkor ez a felületszármaztatás gúlapalástot eredményez Ha a vezérgörbe kör és a csúcspont a kör középpontján át a kör síkjára állított merőlegesen van, akkor forgáskúpfelületet kapunk 3.5 ÖSSZETETT ALAKZATOK SZERKESZTÉSE Az összetett alakzat szerkesztése abból áll, hogy a már definiált komponenseket egy előre megválasztott koordináta-rendszerben megfelelően pozícionáljuk, és az alakzathoz rendeljük. Az előre megválasztott koordináta-rendszer lesz az eredményül kapott összetett alakzat
koordináta-rendszere. Ezt nevezzük globális koordináta-rendszernek Minden komponensnek van saját koordináta-rendszere, amelyben definiáltuk. Ezt lokális koordináta-rendszernek nevez- 12 zük. Ha egy komponenst a globális koordináta-rendszerben forgatással és eltolással a megfelelő helyre teszünk, akkor lokális koordináta-rendszerének kezdőpontját és bázisvektorait kell megadnunk a globális koordináta-rendszerbeli koordinátáival. A szóban forgó komponensnek az alakzathoz való rendelése azt jelenti, hogy ki kell számítani a komponens pontjainak új, a globális koordináta-rendszerre vonatkozó koordinátáit, vagyis koordináta-transzformációt kell elvégezni. Ha a két koordináta-rendszer bázisvektorai megegyeznek, akkor a koordinátatranszformáció eltolás 13 4 A KÖZELÍTŐ POLIÉDEREK ADATRENDSZERE Ha a felületek származtatásánál a meghatározó görbéket (meridiángörbe, vezérgörbe) poligonnak tekintjük, és csak a poligon
csúcsaira végezzük el a felületet előállító geometriai műveleteket, akkor nem kapjuk meg a felület minden pontját, csak egy, a felületen elhelyezkedő ponthalmazt vagy szakaszsereget. A csavarfelületnek nem állítjuk elő az összes alkotóegyenesét, csak a csavarmozgás egyenlő szögelfordulásaihoz tartozó alkotószakaszokat. Ha ezeknek az azonos csavarvonalon fekvő végpontjait egyenes szakaszokkal összekötjük, akkor egymáshoz csatlakozó térbeli (torz) négyszögeket kapunk. Zérus menetemelkedésnél síknégyszögek keletkeznek, amelyek egy poliéderfelületet alkotnak. A forgásfelületek generálásánál a meridiángörbe adott számú pontját forgatjuk el a tengely körül egyenlő szögértékekkel Ezáltal minden pont a körpálya helyett szabályos sokszöget ír le. Az a négy pont, amely a meridiánpoligon két szomszédos csúcspontjából két egymás utáni szögelfordulással áll elő, egy síknégyszöget alkot Ha tehát az egész
meridiánpoligonnak az adott szögtartomány egy egyenletes felosztásához tartozó szögértékkel való elforgatott helyzeteit állítjuk elő, akkor a forgásfelületet egymáshoz csatlakozó síklapokból álló poliéderfelülettel helyettesítjük. Az általános hengerfelület előállításánál a vezérgörbét helyettesítő poligon csúcspontjaiba toljuk el az alkotóvektort, és az alkotóegyeneseknek csak ezen vektor által meghatározott szakaszát tekintjük a felülethez tartozónak. Két szomszédos alkotószakasz a megfelelő végpontjaikat összekötő poligonélekkel együtt egy paralelogrammát alkot. A felületet ezekkel az egymáshoz csatlakozó síklapokkal helyettesítjük. Hasonlóképpen közelítjük az általános kúpfelületnek a vezérgörbe és a csúcspont közé eső darabját egy poliéderfelülettel Itt az alappoligon élei és a kúp csúcspontja határozzák meg az egymáshoz csatlakozó háromszöglapokat A felületeket helyettesítő
poliéderfelületek annál jobban közelítik a felület alakját, minél sűrűbb felosztást veszünk a felületet meghatározó görbéken, ill. szögtartományon A felosztások sűrítésével, azaz a pont- és lapszám növelésével növekszik a felületet leíró adatmennyiség és a számítási idő is. A felület egyértelmű numerikus leírásához ugyanis a közelítő poliéderfelület minden csúcspontját, élét és lapját meg kell határozni. 14 5 A MEGJELENÍTÉS MÓDSZEREI 5.1 MERŐLEGES NÉZETEK EGYMÁSRA MERŐLEGES KÉPSÍKOKON Valamely alakzatról készített egy merőleges vetület nem ad elegendő információt az alakzat formájáról és különböző irányú méreteiről. Az ábrázoló geometriai és műszaki szerkesztéseknek egyik alapvető módszere, hogy egymásra merőleges képsíkokat veszünk fel, azokra az alakzatokat merőlegesen vetítjük, és két vagy több egymáshoz kapcsolt (rendezett) vetületen szerkesztünk. 5.2 AXONOMETRIKUS
LEKÉPEZÉSEK Az axonometrikus leképezés olyan párhuzamos vetítés, ahol a képszerkesztés az alakzathoz rögzített derékszögű koordináta-rendszer vetületéhez kapcsolva történik. A képsík, amelyre az alakzatot a koordináta-rendszerével együtt vagy merőlegesen, vagy ferdén, de egymással párhuzamos vetítősugarakkal vetítjük. A képet a vetítősugarak képsíkkal párhuzamos döféspontjai alkotják 5.21 ORTOGONÁLIS AXONOMETRIA Ortogonális axonometrikus vetítés esetén a koordinátatengelyek vetületét úgy kell megadnunk, hogy egymással páronként tompa szöget zárjanak be. Ezek a vetületek azzal a kikötéssel együtt, hogy a vetítés iránya a képsíkra merőleges, meghatározzák a tengelyek egységszakaszainak q x , q y , q z vetületeit, amelyet tengelyirányú rövidüléseknek nevezünk 5.1 ábra: Pont ortogonális axonometrikus leképezése A vetítés numerikus elvégzése azt jelenti, hogy kiszámítjuk a pont vetületének
koordinátáit a képsíkhoz rendelt koordináta-rendszerben. A P(x,y,z) pont vetületének az e 1 , e 2 bázisra vonatkozó (u,v) koordinátái: u=–q x ⋅xcosα+q y ⋅cosβ+c 1 v=q z z–q x ⋅xcosα–q y ⋅sinβ+c 2 ahol a q x , q y , q z a rövidülések értékei rendre a következők: 15 qx = qy = qz = 1 + ctg 2α ctg 2α + ctgα ⋅ ctgβ 1 cosβ 1 + ctgα ⋅ tanβ ctgα ⋅ ctgβ − 1 ctgα ⋅ ctgβ A vetítőegyenesek az e 3 bázisvektorral párhuzamosak. A CAD-rendszerekben az ortogonális axonometrikus leképezés meghatározásának gyakori módja, hogy az alakzat koordináta-rendszerében adjuk meg a vetítőirányt, amely meghatározza a rá merőleges képsíkot. FERDESZÖGŰ AXONOMETRIA Ha ferdeszögű (klinogonális) axonometriában szerkesztünk, akkor a tengelykereszt képét és a tengelyeken az egység vetületét is előírhatjuk. Ekkor a vetítés iránya nem merőleges a képsíkra 5.22 5.3 CENTRÁLIS PROJEKCIÓ A centrális projekciónál
(perspektív leképezésnek is nevezik) abból a helyzetből indulunk ki, hogy a képsík a koordináta-rendszer xy-síkja, a vetítési középpont pedig, amelyen mindegyik vetítőegyenes áthalad, a z tengelyen helyezkedik el a képsíktól t távolságra. Ezt a helyzetet elérhetjük általános helyzetű képsík esetén, ha egy olyan bázistranszformációt hajtunk végre, amely által az új koordináta-rendszer xy-síkja a képsíkra kerül. Ezután szükség lehet még egy eltolásra, ha a centrum nincs rajta a z tengelyen. 5.2 ábra: Pont centrális vetülete A P(x,y,z) pont centrális leképezéssel kapott vetületét P’ jelöli. P’-nek az e 1 , e 2 bázisra vonatkozó (u,v) koordinátáit hasonló háromszögek segítségével számítjuk ki, amely szerint t t u= x, v= y t−z t−z A vetítés irányát minden P pontra a CP egyenes irányvektora adja meg. 16 6 A CAD-RENDSZEREK FELÉPÍTÉSE ÉS TÍPUSAI Annak érdekében, hogy a mérnöki tervezés különböző
műveleteit számítógéppel végezhessük el, a művelet tárgyát olyan rendezett adathalmazzal kell leírni, amely a számítógép számára közvetlenül érthető. Az ilyen módon definiált alakzatot számítógépi modellnek, a meghatározó adathalmazt adatrendszernek vagy adatstruktúrának, a modell előállítását pedig modellezésnek nevezik A CAD-rendszerek (Computer Aided Design) a számítógépi geometriai modellezésre szolgáló grafikus rendszerek, amelyek tartalmazzák a számítógéphez csatolt grafikus eszközök működtetéséhez szükséges eljárásokat, a felhasználó által tervezett geometriai alakzatok numerikus leírására és a geometriai manipulációk elvégzésére szolgáló algoritmusokat, az alakzatokról készített képek előállítását és feldolgozását végző utasításokat, továbbá más grafikus vagy gyártó rendszerek számára adatbázisokat készítő eljárásokat. felhasználó utasítások szintje adatbázis eljárások
szintje eszközök szintje operációs rendszer input eszközök output eszközök 6.1 ábra: A grafikus rendszer szoftverrétegei Bármennyire is sokfélék a grafikus rendszerek, szerkezetükben három egymásra épülő réteget különböztetünk meg: eszközszint, az eljárások szintje és az utasítások szintje. Az eszközszint (device level) tartalmazza az input és output eszközöket aktiváló (driver) és az azokhoz való adatátvitelt végző eljárásokat. Ilyenek az eszközparaméterek standard és aktuális értékeinek lekérdezését végző input eljárások Tartalmaz továbbá egyszerű rajzoló eljárásokat és képelemek attribútumainak beállítását végző eljárásokat Az eszközszinthez tartozó grafikus eljárásokat tartalmazó programcsomagok adott számítógép-konfigurációkra és programozási nyelvekre készülnek. Az eljárásszint (procedural level) összetettebb grafikai és geometriai problémák megoldására és az adatbázis
kezelésére szolgáló algoritmusokat tartalmaz. Ez a szoftverréteg eszközfüggetlen, de függ a programozási nyelvtől, és tartalmaz az alkalmazásokra irányuló elemeket is. A legfelső szint, amelyet az utasítások szintjének (functional level) nevezünk, a speciális alkalmazási célokra szolgáló grafikus és geometriai szerkesztőeljárásokat tartalmazza. Ez a 17 réteg jelenik meg a felhasználó számára CAD-rendszerként, amely ideális esetben eszközfüggetlen, és használatához nem szükségesek programozási ismeretek. 6.1 A SZÁMÍTÓGÉPI GEOMETRIAI MODELLEZÉS MŰVELETEI input adatok definíció geometriai műveletek modellfile leképezés modellfile képfile segédfile-ok 6.2 ábra: A geometriai modellezés műveletei Az első fázis a modellek definiálása. Ennek eredményeként létrejön a modell numerikus leírására szolgáló adatrendszer, amelyet egy név szerint hívható modellfile tartalmaz. A modellek definiálásának módja a
különböző CAD-rendszerekben eltérő Egyes esetekben a képernyőn grafikus segédeszközökkel való képmanipulációk szükségesek a modellek generálásához, más esetekben numerikus bemenő adatok és speciális parancsnyelven kiadott utasítások szükségesek. Ezek mind programozástechnikai különbségek Tartalmilag különböznek egymástól a következő definiálási módszerek: Meghatározott alakú alaptestek, illetve felületek generálása szabadon választható méreteik megadásával. Ezek a rendszer építőelemei, amelyek lehetnek egyszerű vagy összetettebb geometriai alakzatok. Előírt transzformációval valamely síkidomból való modellgenerálás. A transzformáció lehet egyenes vagy görbe mentén való eltolás, így keletkeznek a transzlációs felületek, vagy lehet tengely körüli forgatás, amelynek eredményeként forgásfelületek, ill. forgástestek állnak elő Egyes rendszerek megengednek más generátorokat is (pl. csavarmozgás)
Adott ponthalmazra vagy vonalseregre való felület illesztése, ahol a modell egyértelmű meghatározásához vagy a rendszer, vagy a felhasználó választ peremfeltételeket, amelyek többnyire különböző érintővektorok. Így állnak elő a foltokból öszszerakott ún szabad formájú felületek A közvetlenül csúcspontokból, élekből és lapokból való építkezés. Vetületekből való modellkonstrukció. A második műveletcsoportba tartoznak a geometriai manipulációk, amelyek egy vagy több, már definiált modellen működnek, és egy új modellt eredményeznek. Ezek lényegében három csoportra oszthatók: Transzformációk, amelyek egy modellen hatnak, és definiálásukhoz bemenő adatként a transzformációk paramétereinek értékeit is meg kell adni. Építkezés több modellből. Ennél a műveletnél a felhasználó a szerkesztendő modell (globális) koordináta-rendszerében elhelyezi az egyes részeket, vagyis azokat saját
(lokális) koordináta-rendszerükkel pozícionálja. Ezután a rendszer összefűzi a részmodellek adatrendszereit, ami gyakorlatilag koordináta-transzformációkat és a 18 pontok, élek, lapok átszámozását jelenti. Az így keletkező összetett, nem feltétlenül összefüggő alakzat a további műveletek számára egyetlen modellfile-ként szerepel. Két vagy több modellen végzett halmazműveletekkel (Boole-műveletek) való modellszerkesztés. Ezek a halmazműveletek alakzatok egyesítésének (unió), közös részének (metszet) és két alakzat különbségének meghatározását jelentik A halmazműveletekkel definiált modell adatrendszerének a komponensek adataiból való előállítása nagyon számításigényes művelet a fellépő új csúcspontok, élek és lapok miatt. Minden alakzatra működő általános megoldás nem létezik, de több CADrendszer tartalmaz síklapokkal határolt testekre kidolgozott algoritmusokat A geometriai manipulációk
elvégzésével párhuzamosan célszerű a bemenő adatokat és a műveleteket segédfile-okba kiírni, mert ezáltal a szerkesztések reprodukálhatók és könnyen módosíthatók. Ezek a segédfile-ok többnyire szerkeszthető szövegfile-ok A harmadik műveletcsoportba tartoznak a leképezések, amelyek eredményeként a vetítendő modell adatrendszeréből és a vetítés paramétereinek input értékeiből előáll a modell képe. A kép egy kétdimenziós geometriai alakzat, amelynek adatait, vagyis a képelemeknek a képernyő koordináta-rendszerére vonatkozó koordinátáit és egyéb attribútumait a rendszer képfile-ba írja ki. Ez lényegében kétféleképpen történhet: vagy a vetületként előálló képelemek adatai kerülnek a képfile-ba, vagy a képernyő felbontásának megfelelően az összes képpont aktuális jellemző értéke íródik ki a további feldolgozás eszközeitől és céljától függően 6.2 MODELLEZÉS DISZKRÉT ÉS ANALITIKUS MÓDSZEREKKEL
A CAD-rendszereket többféle szempont szerint osztályozhatjuk. Az általunk definiálható modellek dimenziószáma szerint vannak 2D-s, 2,5D-s és 3D-s rendszerek. A 2D-s rajzoló rendszerekben csak síkbeli alakzatok értelmezhetők. A 2,5D-s rendszerek hengeres alakzatokat képesek kezelni, ahol az összes alkotó iránya megegyezik, ezért a modelleket az alaplapjuk és a magasság számértéke egyértelműen definiálja A 3D-s rendszerek viszont térbeli struktúrákkal működnek. Ettől a felosztástól függetlenül a CAD-rendszereket két csoportra lehet osztani aszerint, hogy a modellek leírása diszkrét vagy analitikus adatrendszerrel történik-e. 6.21 MODELLEZÉS DISZKRÉT ADATRENDSZERREL Diszkrét adatokból áll a poliéderek adatrendszere, amelyben az alakzat minden pontja, éle, és lapja fel van sorolva. A különböző CAD-renszerekben a poliéder adatrendszerek a topológiai adatok szerkezetében különböznek egymástól. A poliédereken működő
algoritmusok hatékonysága nagyrészt attól függ, hogy milyen gyorsan lehet az aktuális adatrendszerből a szükséges topológiai információkat összegyűjteni. Egy egészen másfajta adatrendszer az „oktáns-fa”, melynek lényege, hogy a térbeli alakzatot kockákból építik fel, amelyeknek méretét addig finomítják, amennyire azt az alakzat megkívánja. Az összes kockát egy fa alakú gráfba rendezik, amelyet azután különböző szerkesztő és leképező algoritmusok feldolgoznak. A diszkrét adatrendszerek általában igen terjedelmesek, bizonyos eljárások programozására nagyon célszerűek, de nem alkalmasak görbevonalú felületek egzakt leírására. 6.22 MODELLEZÉS ANALITIKUS RENDSZEREKKEL Analitikus leírási módot, azaz függvényekkel való előállítást használnak sima görbék és felületek numerikus definiálására. Az adatrendszer az alappontok (kontrollpontok) halmazát és a konkrét függvényt tartalmazza, amely az adott
ponthalmazból és peremfeltételekből a kívánt görbét, ill. felületet generálja Ez a generálás kétféleképpen történhet Az interpolációnál a görbe, ill felület áthalad az 19 adott pontokon, az approximációnál általában nem halad át, de bizonyos értelemben közel halad az adott pontokhoz. Mindkét szerkesztési módra sokféle, a gyakorlatban is jól bevált megoldás született. A modelleket leíró spline-függvényeknek legtöbbször a paraméteres előállítását használják: görbék megadására egyparaméteres, felületek megadására kétparaméteres függvényeket. Az Hermit-féle harmadfokú vektorspline interpolációs feladat megoldására alkalmas. Ha csak két alappontot adunk meg a p 0 és p 1 helyvektorokkal és peremfeltételként e pontokban két vektort, a p’ 0 ill. p’ 1 vektorokat, akkor az r(t)=p 0 ⋅(1-3t2+2t3)+p 1 ⋅(3t2-2t3)+p’ 0 (t-2t2+t3)+p’ 1 ⋅(–t2+t3), (0≤t≤1) vektorfüggvény egy olyan görbét ír le,
amelynek kezdőpontja p 0 , végpontja p 1 és ezekben a pontokban az érintővektorai p’ 0 ill. p’ 1 A görbét tekinthetjük egy mozgó pont pályájának, amely a t=0 időpillanatban p’ 0 sebességgel indul a p 0 pontból és p’ 1 sebességgel érkezik a p 1 pontba. A t paraméter tehát ebben a felfogásban az időt jelenti, és az r(t) helyvektor adja meg, hogy hol van a pont a t időpillanatban. A görbe alakját a két érintővektor hosszának változása úgy befolyásolja, hogy rövidebb vektorokkal laposabb görbét kapunk. Ha a két alappont távolságához képes viszonylag hosszú érintőket írunk elő, vagyis a mozgó pont nagy sebességgel futja be a görbét, akkor a görbe hurok alakot vehet fel Több alappontra illeszkedő köbös Hermit-spline meghatározásához az alappontok helyvektorait, továbbá az első és utolsó pontbeli érintővektorokat kell megadni. Ezekből az adatokból ívenként (szegmensenként) előállítható egy olyan görbe, ahol a
szegmenseket leíró vektorfüggvény alakja a fentivel megegyezik, és az egész görbe sima, vagyis a görbeívek közös érintővel csatlakoznak az alappontokban, továbbá a görbület is folytonos lesz. A Bézier-féle harmadfokú vektorspline az egyik legegyszerűbb megoldás görbe approximációjára. Egy ív meghatározásához négy kontrollpontot kell helyvektoraival megadni Legyenek ezek p 0 , p 1 , p 2 , p 3 Az r(t)=(1–t3)p 0 +3t(1–t)2p 1 +3t2(1–t)p 2 +t3p 3 , (0≤t≤1) vektorfüggvény olyan görbeívet ad meg, amely áthalad az első (p 0 ) és utolsó (p 3 ) pontokon, és jól követi a négy pont által meghatározott karakterisztikus poligon alakját úgy, hogy annak első és utolsó éle érinti a görbét. 6.3 ábra: Bézier-görbék A kontrollpontok függvényszorzóit súlyfüggvényeknek nevezzük. 20 Több pont megadása esetén úgy állíthatunk elő harmadfokú Bézier-ívekből sima görbét, hogy a csatlakozó szegmensek karakterisztikus
poligonjainak két szomszédos élét egy egyenesen választjuk. A Bézier-spline-ok jól alkalmazhatók görbék számítógépes feldolgozására, mert a meghatározó pontok kényelmesen definiálhatók, a görbe alakja jól elképzelhető, és a polinom függvények könnyen számíthatók. Hátránya, hogy egy pont megváltoztatása után az egész görbét újra kell számítani. Sokkal rugalmasabban kezelhető a B-spline görbe, amely szintén alappontokkal és súlyfüggvényekkel van definiálva, továbbá egyaránt alkalmas interpolációra és approximációra. Bizonyos módon választott további, ún. „fantompontokkal” ugyanis el lehet érni, hogy a görbe áthaladjon kiválasztott alappontokon Legfőbb előnyei, hogy akárhány pontot adunk meg, nem kell szegmensekben gondolkodnunk, mert azokat a függvény generálja, továbbá egy pont meghatározása esetén nem kell az egész görbét újra számítani, hanem harmadfokú esetben csak a szóban forgó pont körüli
négy paraméterintervallumon. Felületeket kétparaméteres vektorfüggvényekkel lehet leírni. Egy kétparaméteres bikubikus (minkét változóban harmadfokú) vektorfüggvény általános alakja a következő: r(u,v)=x(u,v)i+ y(u,v)j+ z(u,v)k ahol mindegyik koordinátafüggvény egy s(u,v)=a 00 +a 01 v+a 02 v2+a 03 v3 +a 10 u+a 11 uv+a 12 uv2+a 13 uv3 +a 20 u2+a 21 u2v+a 22 u2v2+a 23 u2v3 +a 30 u3+a 31 u3v+a 32 u3v2+au3v3 kétváltozós polinom természetesen különböző együtthatókkal. A felületábrázolásnak jól bevált módszere a paramétervonalak hálózatának megrajzolása. A paramétervonalak az u=u 0 és a v=v 0 egyeneseknek az r(u,v) leképezéssel keletkező képei (u 0 ,v 0 ) állandók. Ezek felületi görbék, amelyeknek egyparaméteres vektoregyenlete r(u 0 ,v), ill. r(u,v 0 ) A bikubikus felületdarabokkal kapcsolatban felmerülő gyakorlati kérdés az is, hogy milyen adatokkal célszerű definiálni. Az algebrai együtthatók értékeinek közvetlen
megadása lenne egy definiálási mód, ami tervezési feladatokban nem célszerű. Ehelyett a felületdarabokat ponthalmazzal és esetleg még peremfeltételekkel határozzák meg. A ponthalmazt azután a generált felület interpolálja vagy approximálja. Ezen kívül szokásos eljárás még egy adott görbeseregre való felület illesztése is. Az alkalmazásokban előforduló felületek általában nem írhatók le egyetlen vektorfüggvénnyel, ezért azokat egy alkalmas felosztással több, egymáshoz jól csatlakozó foltból szerkesztik. 6.3 ADATRENDSZEREK SZERKEZETE, DRÓTVÁZAS MODELLEK, FELÜLET- ÉS TESTMODELLEK Az adatrendszerek szerkezeti felépítése lényegében háromféle lehet: Drótvázas vagy más néven élmodelleket generálnak a 2D-s rajzoló rendszerek, a 2,5D-s tervező rendszerek és a régi fejlesztésű 3D-s főként poliédermodellező rendszerek. Ezek a rendszerek minden modellt az éleivel írnak le, ami térbeli alakzatok esetén természetesen
nem kielégítő Emiatt a ma használatos CADrendszerekben a drótvázas modell csak munka közbeni segédábrák, ideiglenes vázlatok előállítására szolgál Az összes él vetületét tartalmazó drótvázas ábrák elkészítéséhez ugyanis elegendő a csúcspontok vetületét meghatározni, ami nagy modellekre is gyorsan elvégezhető Felületmodell áll elő, ha felületi adatstruktúra írja le a rendszer által generált modell határoló felületét, amely síklapokból áll a poliédermodellek, és pontokból áll a szabad formájú felületek esetén. Ezek az adatrendszerek a felületelemeket meghatá- 21 rozó topológiai adatokat tartalmazzák, és a térbeli alakzatokat mindig egyértelműen meghatározzák. A testmodelleket vagy más néven térfogatmodelleket tipikusan olyan rendszerek állítják elő, ahol csak előre definiált primitívekből lehet szerkeszteni. A testmodell egy összetett alakzatot egy speciális szerkezetű gráffal ír le, ahol a
fa egyélű csúcsaiban a primitívek, a csomópontokban pedig a szerkesztésekhez szükséges geometriai manipulációk, azaz halmazműveletek és transzformációk vannak. Ez a struktúra numerikusan tömören leírható, és a modellt mint ponthalmazt egyértelműen állítja elő. Mivel a különböző szerkezetű adatrendszereken más-más algoritmusok működnek hatékonyan, ezért a fejlettebb CAD-rendszerek ún. hibrid modelleket állítanak elő Ez azt jelenti, hogy az alakzatok definiálásakor létrehozzák az alakzatot reprezentáló felületmodellt és testmodellt is, és a különböző operációkat a megfelelő adatrendszereken hajtják végre. Az egyik adatrendszerről a másikra áttérés ugyanis matematikailag nem mindig lehetséges, de ha megoldható is, nagyon számításigényes eljárás. 6.4 A LÁTHATÓSÁG SZERINT VALÓ ÁBRÁZOLÁS ELJÁRÁSAI Egy térbeli alakzatról készített szemléletes kép megkülönbözteti az alakzat látható részeit a nem
láthatóktól, vagy csak a látható éleket tartalmazza. A láthatóság eldöntéséhez minden esetben a modellen és a képernyőn (képtérben) is vizsgálatokat kell elvégezni, de hogy mi látszik, csak a térben dönthető el. A láthatósági problémák eldöntésére nem létezik egy mindenkor érvényes legjobb algoritmus, mert a számítási módszerek függenek egyrészt az adatrendszer típusától és szerkezetétől, másrészt attól, hogy vonalas vagy raszteres képet állítanak elő. Legegyszerűbb a konvex poliéderek látható éleinek és lapjainak a kiválasztása paralel projekció esetén. Láthatók ugyanis a szemlélő felé forduló lapok élei Ezeket a lapokat a kifelé irányított normálvektoroknak a vetítősugarakkal bezárt szöge szerint lehet kiválasztani. Ha ez a szög tompaszög, akkor a szóban forgó lap és az élei látszanak, ha hegyesszög, akkor a lap nem látszik, de a látható lapokhoz csatlakozó élei igen. Ezt a vizsgálatot a nem
konvex alakzatok láthatóságának eldöntésére kidolgozott algoritmusok is elvégzik a biztosan nem látható élek kiszűrésére. Görbevonalú felületekkel határolt alakzatok ábrázolásánál gyakori módszer, hogy az alakzatot egy közelítő poliéderrel helyettesítik, és a poliédert ábrázolják. 6.5 A GRAFIKUS RENDSZEREK KÖZÖTTI ÁTVITEL KÉRDÉSEI A számítógépi modelleket leíró adatrendszerek különbözősége miatt az egyik CADrendszerrel szerkesztett modell adatait egy másik CAD-rendszer általában közvetlenül nem tudja beolvasni és értelmezni. E nehézségek elkerülésére készülnek az adatkonvertáló interfész programcsomagok, amelyek nemzetközi normáknak megfelelő adatrendszerrel írnak le bizonyos számítógépi modelleket. Így ha két CAD-rendszer rendelkezik ugyanazzal az interfésszel, akkor közöttük azok a modellek átvihetők, amelyeket az interfész tartalmaz. A modellt definiáló információk egységes leírására
szolgáló adatfile-ok szerkezetének kérdését, ami a számítógépi modelleknek a grafikus rendszerektől való függetlenségét célozza, elválasztották az alapszoftver kérdésétől. Ezen elképzelés szerint a modellező rendszer által generált adatrendszert az interfészben rögzített formában egy ún. neutrális modellfile tartalmazza, a képet definiáló grafikus információkat pedig a grafikus alapszoftver segítségével létrehozott neutrális képfile tartalmazza. A gyakorlatban a CAD-rendszerek között, továbbá egyes CAD-rendszerek és felhasználói rendszerek kötött sokszor speciális, a szóban forgó modellekre fejlesztett adatkonvertáló programokkal végzik el az adatátvitelt. Gyakori megoldás az is, hogy közvetlenül és széleskörűen 22 elterjedt szerkesztőrendszerhez készítenek interfészt a modelladatok, ill. képfile-ok további feldolgozására. 23 7 CAD-KÖRNYEZET Az alkalmazások szempontjából felmerülő alapkérdés,
hogy hogyan lehet egy CADrendszerrel létrehozott geometriai modellt a gyártó rendszerekkel feldolgozni. A gyártási folyamatokhoz szükséges geometriai információk átvitelére a gyártási folyamatba integrált modellező és megmunkáló rendszer közötti interfész szolgál A különböző felhasználói rendszerek számára más-más geometriai információk szükségesek, amelyeket maguk is további geometriai számításokkal egészítenek ki 7.1 CAD-RENDSZER FELÜLETMEGMUNKÁLÓ NC-GÉPEK A számítógéppel vezérelt NC (Numeric Control) gépek a szerszámfejnek a felület mentén való mozgatásával állítják elő a tervezett munkadarabot. A szerszámpálya kiszámításához szükséges a megmunkálandó felület és a tervezett felület numerikus leírása, továbbá a szerszámfej mérete, mozgási szabadságfoka és különböző technológiai adatok. Ilyen számításokra az analitikusan leírt felületmodellek alkalmasak, a szerszámpálya ekkor felületi
görbe vagy görbesereg. A szerszámfejnek a munkadarabhoz való illesztése annál rugalmasabb, minél nagyobb a térbeli mozgási szabadságfoka, amit azzal jellemeznek, hogy hány különböző irányban mozgatható el. 7.2 CAD-RENDSZER VÉGESELEM-RENDSZEREK Ha egy síkbeli lemezmodell vagy egy térbeli modell belső pontjaiban bizonyos fizikai jellemzőket (hőeloszlás, erőeloszlás, feszültség stb.) kell meghatározni, amelyek adott környezeti behatásokra (melegítés, megterhelés, hajlítás stb) keletkeznek, akkor célszerű a modellt egyszerű alakú, viszonylag kisméretű, ismert fizikai tulajdonságú elemi részek halmazával helyettesíteni, és a szükséges számításokat ezekre elvégezni. Ezt a módszert nevezik végeselem módszernek, amellyel egy gyártmány használhatóságát vizsgálják meg. A végeselem analízist vagy egy elkészített mintadarabon, vagy a CAD-rendszerek felhasználásával egy számítógépi modellen végzik el. A CAD-rendszerek
integrálásával a gyártmány vizsgálata a következő elemekből áll: 1. a számítógépi modell előállítása 2. az elemi részekkel való közelítés (végeselem-háló generálása) 3. a fizikai behatások, anyagi tulajdonságok, peremfeltételek megadása 4. a kívánt fizikai értékek kiszámítása minden elemre 5. az eredmények szemléltetése Ha a modellező rendszer nem tartalmazza a végeselem-háló generálását, akkor azt egy ún. preprocesszor végzi el, amely a modelladatokat valamilyen interfészen keresztül kapja, és az elemi részek halmazát adja tovább. A 3 és a 4 fázist a végeselem-rendszer végzi el, amely vagy képes az eredmények grafikus megjelenítésére, vagy azt egy ún. posztprocesszor végzi el. Összetett modellekre a végeselem-háló elkészítése sokkal gazdaságosabban oldható meg, ha nemcsak a modell adatstruktúrája, hanem szerkesztési módja is ismert. Ezért több olyan CAD-rendszert is kifejlesztettek, amelyek a modell
definiálásával egyidejűleg a végeselemhálót is generálják, sőt bizonyos fizikai jelenségekre vonatkozó végeselem-analízist is el tudnak végezni. 7.3 CAD-RENDSZER ROBOTSZIMULÁLÓ RENDSZEREK Az ipari robotok számítógéppel való megtervezése lényegében geometriai és kinematikai számításokból áll. A munkadarabot és az azt megmunkáló robotot, ill ezek számítógépi modelljeit egy ún gyártócellában helyezik el A munkadarab geometriai adatait, amelyeket egy CAD-rendszer szolgáltat a megfelelő interfészen keresztül, a megmunkálás szimulálásához 24 még további geometriai és gyártástechnológiai adatokkal egészítik ki. A robot mint számítógépi modell leírásához a geometriai adatokon kívül még lehetséges mozgásokat, ill mozgássorozatokat és technológiai jellemzőket is megadnak Ha a munkadarab és a robot modellje már a gyártócellában van, a megmunkálási folyamat megtervezése, vagyis a szimulált robot által
elvégzendő műveletsor kiszámítása következik. A tervezett mozgások minden időpillanatában meg kell határozni a robot szerszámfejeinek a munkadarabhoz viszonyított kölcsönös térbeli helyzeteit az optimális pályagörbék kialakítására. A robot által végzett mozgások egy részének sorrendjét a robot szerkezete és a gyártási folyamat meghatározza, de az egész kinematikai láncnak egy adott tényező szerint való optimalizálása a robotszimulálás egyik legfontosabb művelete. A számítógéppel vezérelt gyártási folyamatban részt vevő CAD-rendszert és a rá épülő megmunkáló rendszert összefoglalóan CAM-rendszernek (Computer Aided Manufactoring) nevezik. 25 TARTALOMJEGYZÉK 1 DERÉKSZÖGŰ KOORDINÁTA-RENDSZEREK 1 1.1 DESCARTES-FÉLE KOORDINÁTÁK 1.2 KOORDINÁTATRANSZFORMÁCIÓK 1.21 A KOORDINÁTA RENDSZER ELTOLÁSA 1.22 A KOORDINÁTA-RENDSZER ELFORGATÁSA 1.23 A HOSSZEGYSÉGEK MEGVÁLTOZTATÁSA A KOORDINÁTATENGELYEKEN (SKÁLÁZÁS)
1.24 ÖSSZETETT TRANSZFORMÁCIÓK 1.3 HOMOGÉN KOORDINÁTÁK 1 1 1 2 2 3 3 2 5 TÉRBELI ALAKZATOK TRANSZFORMÁCIÓI 2.1 LINEÁRIS TARNSZFORMÁCIÓK, PONTTRANSZFORMÁCIÓK 2.2 EGYENES KÖRÜLI FORGATÁS 2.3 SÍKRA VONATKOZÓ TÜKRÖZÉS 2.4 NYÚJTÁS, ZSUGORÍTÁS A KOORDINÁTATENGELYEK IRÁNYÁBAN 2.5 MERŐLEGES VETÍTÉS 2.51 VETÍTÉS A KOORDINÁTASÍKOKRA 2.52 MERŐLEGES VETÍTÉS ORIGÓN ÁTHALADÓ ÁLTALÁNOS HELYZETŰ SÍKRA 2.6 PONTTRANSZFORMÁCIÓK FELÍRÁSA HOMOGÉN KOORDINÁTÁKKAL 5 5 6 7 7 7 7 9 FELÜLETEK MEGHATÁROZÓ ADATAI ÉS ELŐÁLLÍTÁSA 10 3 3.1 3.2 3.3 3.4 3.5 CSAVARFELÜLETEK FORGÁSFELÜLETEK ÁLTALÁNOS HENGERFELÜLETEK ÁLTALÁNOS KÚPFELÜLETEK ÖSSZETETT ALAKZATOK SZERKESZTÉSE 10 10 11 11 11 4 A KÖZELÍTŐ POLIÉDEREK ADATRENDSZERE 13 5 A MEGJELENÍTÉS MÓDSZEREI 14 5.1 MERŐLEGES NÉZETEK EGYMÁSRA MERŐLEGES KÉPSÍKOKON 5.2 AXONOMETRIKUS LEKÉPEZÉSEK 5.21 ORTOGONÁLIS AXONOMETRIA 5.22 FERDESZÖGŰ AXONOMETRIA 5.3 CENTRÁLIS
PROJEKCIÓ 14 14 14 15 15 6 16 6.1 A CAD-RENDSZEREK FELÉPÍTÉSE ÉS TÍPUSAI A SZÁMÍTÓGÉPI GEOMETRIAI MODELLEZÉS MŰVELETEI 17 26 6.2 MODELLEZÉS DISZKRÉT ÉS ANALITIKUS MÓDSZEREKKEL 6.21 MODELLEZÉS DISZKRÉT ADATRENDSZERREL 6.22 MODELLEZÉS ANALITIKUS RENDSZEREKKEL 6.3 ADATRENDSZEREK SZERKEZETE, DRÓTVÁZAS MODELLEK, FELÜLET- ÉS 18 18 18 TESTMODELLEK 6.4 A LÁTHATÓSÁG SZERINT VALÓ ÁBRÁZOLÁS ELJÁRÁSAI 6.5 A GRAFIKUS RENDSZEREK KÖZÖTTI ÁTVITEL KÉRDÉSEI 20 21 21 7 23 7.1 7.2 7.3 CAD-KÖRNYEZET CAD-RENDSZER FELÜLETMEGMUNKÁLÓ NC-GÉPEK CAD-RENDSZER VÉGESELEM-RENDSZEREK CAD-RENDSZER ROBOTSZIMULÁLÓ RENDSZEREK TARTALOMJEGYZÉK 23 23 23 25
rendszerbeli koordinátákat, amit koordináta-transzformációnak nevezünk. 1.21 A KOORDINÁTA RENDSZER ELTOLÁSA k k P O’(c1,c2,c3) O i i j j 1.2 ábra: A koordináta rendszer eltolása Toljuk el a koordináta rendszer kezdőpontját egy O’ pontba. Ekkor az O' P =x’i+y’j+z’k helyvektorra O' P = OP – OO' teljesül, ahol OP a P pont helyvektora, OO' pedig az új origó helyvektora az eredeti koordináta-rendszerben. Ha a P pont koordinátái a régi rendszerben (x,y,z), az O’ ponté pedig (c 1 ,c 2 ,c 3 ), akkor a koordináta-transzformációt az x’=x-c 1 , y’=y–c 2 , z’=z–c 3 egyenletek adják meg. 2 1.22 A KOORDINÁTA-RENDSZER ELFORGATÁSA Válasszunk három új, egymásra páronként merőleges jobbrendszert alkotó egységvektort bázisvektornak, miközben az origó helyben marad. Legyenek e 1 , e 2 , e 3 az új koordinátaegységvektorok a régi bázisban a következőképpen kifejezve: e m =a 1m i+a 2m j+a 3m k m=1,2,3 Az
együtthatókat egy mátrixba írjuk, amelyet a bázistranszformáció mátrixának nevezünk: a 11 a 12 a 13 A = a 21 a 22 a 23 a 31 a 32 a 33 vagy tömörebb formában írva: A = [e1 e2 e3 ] . Ha a P pont koordinátáit az eredeti i, j, k bázisban (x,y,z), az új e 1 , e 2 , e 3 bázisban pedig (u,v,w) jelöli, akkor OP = ue 1 +ve 2 +we 3 =u(a 11 i+a 21 j+a 31 k)+v(a 12 i+a 22 j+a 32 k)+w(a 13 i+a 23 j+a 33 k) másrészt OP =xi+yj+zk Az i, j, k vektorok együtthatóinak összehasonlításával x=a 11 u+a 12 v+a 13 w y=a 21 u+a 22 v+a 23 w z=a 31 u+a 32 v+a 33 w adódik. Tömörebb formában: u x y = A⋅ v w z Mivel a bázistranszformáció mátrixának determinánsa az e 1 , e 2 , e 3 oszlopvektorok lineáris függetlensége miatt nem zérus, létezik az inverze. Az inverz pedig az oszlopvektorok ortonormáltsága miatt a mátrix transzponáltja, ezért a pont koordinátái
az új rendszerben az x u v = A* ⋅ y z w egyenletekkel számíthatók ki, ahol A* az A transzponáltját jelöli. 1.23 A HOSSZEGYSÉGEK MEGVÁLTOZTATÁSA A KOORDINÁTATENGELYEKEN (SKÁLÁZÁS) Legyen az új koordináta-rendszer kezdőpontja ugyanaz mint az eredetié, a koordináta egységvektorok pedig az i, j, k vektorokkal egyirányúak. Ekkor e 2 =q y j, e 3 =q z k, q x >0, q y >0, q z >0. e 1 =q x i, Kiszámítjuk az i, j, k rendszerben adott P(x,y,z) pont koordinátáit az új koordináta rendszerben. Mivel OP = ue 1 +ve 2 +we 3 =uq x i+vq y j+wq z k) a régi és az új koordináták között a következő összefüggéseket kapjuk x=q x u, y=q y v, z=q z w 3 1.24 ÖSSZETETT TRANSZFORMÁCIÓK Általános esetben, ha a koordináta-rendszert eltoljuk, elforgatjuk és a tengelyeken a léptéket is megváltoztatjuk, a koordináta-transzformációt e transzformációk egymás után való
elvégzésével számíthatjuk ki. Az új koordináta-rendszerből a régibe való átszámításra az q x u c1 x y = A ⋅ q v + c y 2 q z w c3 z egyenleteket kapjuk, ahol az A mátrix oszlopaiban az új bázisvektoroknak az eredeti bázisra vonatkozó koordinátái állnak. Az u, v, w innen úgy számítható ki, hogy c 1 , c 2 , c 3 mindkét oldalból való kivonása után mindkét oldalt az A-1=A* mátrixszal balról megszorozzuk, majd a megfelelő q x , q y , q z tényezőkkel átszorzunk. 1.3 HOMOGÉN KOORDINÁTÁK x3 * P V y x P * V O x1 x2 1.3 ábra: A sík pontjainak homogén koordinátái Csatoljunk az x, y derékszögű koordináta-rendszerhez egy olyan térbeli derékszögű koordináta-rendszert, amelynek x 1 , x 2 tengelyei az x, y tengelyekkel párhuzamosak, x 3 tengelyének az egységpontja pedig az eredeti x, y koordináta-rendszer kezdőpontja. Az
xy-sík bármely P pontját megadhatjuk az O ponton áthaladó OP egyenessel, vagy ami ugyanaz, az OP* egyenessel úgy, hogy az egyenesnek az xy-síkkal alkotott döféspontja jelöli ki a szóban forgó pontot. Minden olyan egyenes pedig, amely az xy-síkot metszi, megadható egy olyan OP * (x 1 ,x 2 ,x 3 ) vektorral, amelyre x 3 ≠0. Ezt az [x 1 ,x 2 ,x 3 ] koordinátahármast a P pont homogén koordinátáinak nevezzük. A pont homogén koordinátáit egy zérustól különböző λ számmal megszorozhatjuk, hiszen a (λx 1 ,λx 2 ,λx 3 ) koordinátájú vektor ugyanazt az egyenest, és ezáltal ugyanazt a P pontot határozza meg, mint az (x 1 ,x 2 ,x 3 ) koordinátájú vektor Az x 1 , x 2 , x 3 koordináta-rendszer x 1 , x 2 síkjában adott OV * (v 1 ,v 2 ,0) vektor egyenese nem metszi az xy-síkot. Az ilyen [v 1 ,v 2 ,0] homogén koordinátahármasnak az xy-sík (v 1 ,v 2 ) vektorát tudjuk megfeleltetni. Ha ezzel a (v 1 ,v 2 ) vektorral párhuzamos egyenesekhez egy
„ideális pontot” (V) rendelünk, akkor azt mondjuk, hogy [v 1 ,v 2 ,0] ennek a V ideális pontnak a homogén koordinátái. Két egyeneshez akkor és csak akkor rendeljük ugyanazt az ideális pontot, ha két egyenes párhuzamos. Ily módon az ideális pontokkal kibővített sík bármely két egyenesének egyetlen közös pontja van. A sík ideális pontjainak összessége a sík ideális egyenesét alkotja Az ideális pontokkal kibővített euklideszi síkot projektív síknak nevezik. A zérusvektor nem határoz meg egyenest, ezért egy pont homogén koordinátáinak mindegyike nem lehet 0. Egyébként minden számhármas egyetlen pontot határoz meg, az [x 1 ,x 2 ,0] 4 típusúak ideális, az [x 1 ,x 2 ,x 3 ] (x 3 ≠0) típusúak pedig „közönséges” pontokat. Az ideális pontoknak nincsenek Descartes-féle koordinátái, a közönséges pontok homogén és Descartes-féle koordinátáira x 1 :x 2 :x 3 =x:y:1 teljesül. 5 2 TÉRBELI ALAKZATOK TRANSZFORMÁCIÓI
2.1 LINEÁRIS TARNSZFORMÁCIÓK, PONTTRANSZFORMÁCIÓK A háromdimenziós vektortérnek olyan A leképezéseiről van szó, amelyek minden v vektorhoz egy egyértelműen meghatározott Av „képteret” rendelnek és lineárisak, vagyis két tetszőleges u, v vektorra és tetszőleges c valós számra A(u+v)=A(u)+A(v) A(cu)=cA(u) teljesül. Írjuk fel a lineáris leképezést egy e 1 , e 2 , e 3 bázisban Ha v=xe 1 +ye 2 +ze 3 , akkor a fenti tulajdonság miatt Av=xAe 1 +yAe 2 +zAe 3 Legyen Ae i =a 1i e 1 +a 2i e 2 +a 3i e 3 (i=1,2,3) hiszen a bázisvektorok képe is vektor, ezért felírhatók e 1 , e 2 , e 3 lineáris kombinációjaként. Innen Av=x(a 11 e 1 +a 21 e 2 +a 31 e 3 )+y(a 12 e 1 +a 22 e 2 +a 32 e 3 )+z(a 13 e 1 +a 23 e 2 +a 33 e 3 ) adódik. Rendezzük a jobb oldalt e 1 , e 2 , e 3 szerint, az együtthatók éppen az Av vektor koordinátái lesznek: x’=a 11 x+a 12 y+a 13 z y’=a 21 x+a 22 y+a 23 z z’=a 31 x+a 32 y+a 33 z Ebből azt látjuk, hogy az A lineáris
leképezésnek az adott e 1 , e 2 , e 3 bázisban egy mátrix felel meg: a 11 a 12 a 13 A = a 21 a 22 a 23 a 31 a 32 a 33 A mátrix oszlopaiban a bázisvektorok képei állnak. Megfordítva az teljesül, hogy minden 3x3-as mátrix egy adott bázisban a háromdimenziós vektorok terén egy lineáris leképezés mátrixának tekinthető. Az eddigiekből következik, hogy egy lineáris leképezés mátrixát egy adott bázisban fel tudjuk írni, ha ismerjük a bázisvektorok képét. A mátrix ismeretében pedig bármely további vektor képe meghatározható. Ha egy vektor képére újabb lineáris transzformációt alkalmazunk, vagyis v’=Av és v’’=Bv’, akkor v’’=B(Av) összetett transzformáció mátrixa a BA szorzatmátrix. Ezt a tényt úgy is megfogalmazhatjuk, hogy lineáris transzformációk szorzata ismét lineáris transzformáció. Invertálhatónak nevezzük a lineáris transzformációt, ha kölcsönösen egyértelmű
megfeleltetést létesít a vektortér és a képtér elemei között. Ezzel ekvivalens, hogy Av=0 egyenletből v=0 következik. Az ilyen transzformációnak van inverze, amelynek mátrixa A-1 Az invertálható lineáris transzformáció mátrixának oszlopvektorai lineárisan független vektorok Ha egy lineáris transzformáció nem invertálható, akkor elfajulónak nevezzük. Az elfajuló transzformáció képterének dimenziója kisebb mint 3. 2.2 EGYENES KÖRÜLI FORGATÁS Forgassuk el a tér pontjait a koordináta-rendszer z tengelye körül pozitív irányban ϕ szöggel. Ezután számítsuk ki a koordináta-egységvektorok elforgatottjának koordinátáit: 6 y ϕ j Fi Fj ϕ z x i 2.1 ábra: Forgatás a z tengely körül Fi=cos ϕ i+sin ϕ j Fj=-sin ϕ i+cos ϕ j Fk=k Ezért cos ϕ F = sin ϕ 0 − sin ϕ cos ϕ 0 0 0 1 2.3 SÍKRA VONATKOZÓ TÜKRÖZÉS Tükrözzük a tér pontjait egy olyan α síkra, amely a z tengelyt
tartalmazza, és az xzkoordinátasíkkal ϕ szöget alkot. Ha a transzformáció mátrixát T jelöli, Tk=k teljesül, mivel a z tengely tükörképe önmaga. Ti j α ϕ ϕ 90°–2 ϕ Tj 2.2 ábra: Tükrözés azα síkra Ti=cos2 ϕ i+sin2 ϕ j Tj=sin2 ϕ i–cos2 ϕ j Ezért i 7 cos 2ϕ sin 2ϕ 0 F = sin 2ϕ − cos 2ϕ 0 0 0 1 A síkra vonatkozó tükrözés ortogonális irányításváltó transzformáció, amely egy ortonormált jobbsodrású bázist ortonormált balsodrásúba visz át. A mátrix inverze a transzponáltja és determinánsának értéke –1 2.4 NYÚJTÁS, ZSUGORÍTÁS A KOORDINÁTATENGELYEK IRÁNYÁBAN Ezt a transzformációt úgy definiáljuk, hogy egy tetszőleges P(x,y,z) pont koordinátáit rendre megszorozzuk a q 1 >0, q 2 >0 és q 3 >0 nyújtási tényezőkkel. A transzformáció mátrixát megkapjuk, ha oszlopaiba a megnyújtott bázisvektorokat írjuk, azaz q1 0 0 N = 0 q 2 0 0
0 q3 Ha q 1 = q 2 =q 3 =q, akkor speciális esetként az origó középpontú q arányú hasonlósági leképezésről van szó, amelynek mátrixa q 0 0 H = 0 q 0 0 0 q 2.5 MERŐLEGES VETÍTÉS 2.51 VETÍTÉS A KOORDINÁTASÍKOKRA Vetítsük a tér pontjait az xy-koordinátasíkra. Mivel az i és j bázisvektorok vetülete önmaga, a k vetülete pedig zérus vektor, a vetítés mátrixa a következő: 1 0 0 Vxy = 0 1 0 0 0 0 Hasonlóképpen írhatjuk fel az yz-koordinátasíkra való x-irányú vetítés 0 0 0 Vyz = 0 1 0 0 0 1 mátrixát és az xz-koordinátasíkra való y-irányú vetítés 1 0 0 Vxz = 0 0 0 0 0 0 mátrixát. 2.52 MERŐLEGES VETÍTÉS ORIGÓN ÁTHALADÓ ÁLTALÁNOS HELYZETŰ SÍKRA Ezt a feladatot visszavezethetjük az xy-koordinátasíkra való merőleges vetítésre úgy, hogy először elforgatjuk a koordináta rendszert olyan
helyzetbe, hogy az xy-sík az adott általános 8 helyzetű síkba kerüljön. Ebben a helyzetben végrehajtjuk a z tengely irányából való vetítést, majd visszatérünk az eredeti koordináta rendszerbe. Az általános helyzetű képsík állását a rá merőleges vetítési irány megadásával határozzuk meg. A vetítési irányt két szöggel adjuk meg: a z tengellyel bezárt szög legyen ϑ , az xy-síkra való merőleges vetületének az x tengelylyel bezárt szöge legyen ϕ . Ezek a szögek tulajdonképpen a vetítési irány egységvektorának polárkoordinátái. A vetítési iránnyal ellentétes irányú egységvektor lesz az e 3 új bázisvektora 2.3 ábra: Merőleges vetítés az [e 1 ,e 2 ] síkra Megállapítható, hogy e 3 =sin ϑ cos ϕ i+ sin ϑ sin ϕ j+cos ϑ k. Az e 3 -ra merőleges képsíkban az új koordináta-egységvektorokat szabadon választhatjuk meg. A koordináta-transzformáció mátrixa a következő: − sin ϕ − cos ϑ cos ϕ sin ϑ
cos ϕ A = cos ϕ − cos ϑ sin ϕ sin ϑ sin ϕ 0 sin ϑ cos ϑ Mivel A ortogonális mátrix, A-1=A*. Az e 1 és e 2 bázisvektorok síkjára való merőleges vetítés mátrixa az e 1 , e 2 , e 3 bázisban 1 0 0 V = 0 1 0 0 0 0 Egy tetszőlegyes P pont koordinátáit az e 1 , e 2 , e 3 bázisban az x * A ⋅ y z mátrixszorzással kapjuk. Ezekre az új koordinátákra kell alkalmazni a V mátrixú vetítést, majd az A bázistranszformációval visszaszámolni a vetület koordinátáit az eredeti koordinátarendszerbe. Ha P vetületét P’(x’,y’,z’) jelöli, akkor x x' y' = A⋅ V ⋅ A* ⋅ y z z' A képsík koordináta-rendszerében, amelynek koodrináta-egységvektorai e 1 és e 2 , az e 3 pedig az a vetítési irányt adja meg, a tárgy körüljárása az e 2 körüli ϕ szöggel való
forgatást, a 9 vetítési iránynak az [e 2 ,e 3 ] síkban történő változtatása pedig e 1 körüli ϑ szöggel való forgatást jelenti. 2.6 PONTTRANSZFORMÁCIÓK FELÍRÁSA HOMOGÉN KOORDINÁTÁKKAL A homogén koordináták segítségével olyan transzformációk mátrixát írhatjuk fel, amelyek egy, az origót helyben hagyó lineáris transzformáció és egy eltolás egymás utáni végrehajtásának felelnek meg. Ezeket affin transzformációknak nevezik Végezzük el a háromdimenziós euklideszi térben a (d x ,d y ,d z ) vektorral való eltolást. A P(x,y,z) pont képe ekkor az x’=x+ d x , y’=y+ d y , z’=z+ d z koordinátájú pont lesz. Homogén koordinátákkal ugyanez az eltolás a d x x x' 1 y' 1 d y y = ⋅ z' 1 d z z 1 1 1 mátrixszorzással írható fel. Az A transzformáció mátrixa homogén
koordináta-rendszerben 0 kA 0 0 0 0 0 k alakú lesz, ezért az A transzformáció és az eltolás kompozíciója a d1 d A d 2 4 d3 0 0 0 d 4 mátrixszal számítható ki, melyre d x :d y :d z :1= d 1 :d 2 :d 3 :d 4 A homogén koordináták használatának egyik előnye, hogy az eltolás is mátrixszorzással számítható ki. Másik előnye az, hogy a numerikus számolás kiegyensúlyozottabbá tehető az adatok kedvezőtlen nagyságrendje esetén. 10 3 FELÜLETEK MEGHATÁROZÓ ADATAI ÉS ELŐÁLLÍTÁSA 3.1 CSAVARFELÜLETEK Egy pont csavarmozgást végez, ha egy tengely körül állandó szögsebességgel forog, és ugyanakkor a tengely irányában állandó sebességgel halad. A pont pályagörbéje hengeres csavarvonal, amelynek tetszőleges pontja az x(t)=acost, y(t)=asint, z(t)=ct, (–∞<t<+∞) koordinátafüggvényekkel adható meg. A t változó az elfordulás szöge, a a
henger sugara, c pedig az 1 radián szögelforduláshoz tartozó menetemelkedés. A csavarvonal menetmagassága c2π. A csavarmozgást végző szakasz csavarfelületen mozog 3.1 ábra: Hengeres csavarvonal A csavarfelületek alakja nagyon változatos aszerint, hogy a szakasz a csavarmozgás tengelyéhez viszonyítva milyen helyzetű. Ha a szakasz egyenese a tengelyre merőleges, akkor laposmenetű, egyébként élesmenetű csavarfelületen mozog. Ha a csavar felülete metszi a tengelyt, akkor zárt, egyébként nyitott csavarfelület keletkezik 3.2 FORGÁSFELÜLETEK 3.2 ábra: Forgásfelület származtatása Egy forgásfelület meghatározásához egy forgástengelyt és egy meridiángörbét kell megadni úgy, hogy a meridiángörbe és a tengely ugyanabban a síkban legyen, és a görbe ne metssze a tengelyt. Ha a meridiángörbe minden pontját a tengely körül egy meghatározott szöggel elforgatjuk, forgásfelületet kapunk. A teljes forgásfelület a t forgásszög [0,2π]
intervallumához tartozik, ekkor a meridiángörbe minden pontja egy tengelyre merőleges síkú kört ír le 11 3.3 ÁLTALÁNOS HENGERFELÜLETEK Az általános hengerfelületet vezérgörbéje és alkotóvektora határozza meg. A vezérgörbe egy tetszőleges síkgörbe, és az alkotó nem párhuzamos a görbe síkjával. 3.3 ábra: Általános hengerfelület Ezekből az adatokból a felületet úgy állítjuk elő, hogy a vezérgörbe minden pontján át az alkotóval párhuzamos egyenest húzunk. Így végtelen hengerfelületet kapunk Ha a vezérgörbe sokszög, akkor a hengerfelület származtatásával egy végtelen hasáb palástjához jutunk. Ha a vezérgörbe kör és az alkotóvektor merőleges a kör síkjára, akkor egyenes körhengerfelületet kapunk. A szokásos értelemben ha hengerről beszélünk, nem a végtelen hengerfelületre gondolunk, hanem annak a két vezérgörbe közé eső darabjára A lezáró véglapok azonban nem tartoznak a hengerfelülethez. 3.4
ÁLTALÁNOS KÚPFELÜLETEK 3.4 ábra: Általános kúpfelület Az általános kúpfelületet vezérgörbéje és csúcspontja határozza meg. A vezérgörbe egy tetszőleges síkgörbe, és a csúcspont a görbe síkján kívül van. Ezekből az adatokból a felületet úgy állítjuk elő, hogy a vezérgörbe minden pontján át a csúcsponton áthaladó egyenest illesztünk. Így egy végtelen kettős kúpfelület keletkezik Ha a vezérgörbe sokszög, akkor ez a felületszármaztatás gúlapalástot eredményez Ha a vezérgörbe kör és a csúcspont a kör középpontján át a kör síkjára állított merőlegesen van, akkor forgáskúpfelületet kapunk 3.5 ÖSSZETETT ALAKZATOK SZERKESZTÉSE Az összetett alakzat szerkesztése abból áll, hogy a már definiált komponenseket egy előre megválasztott koordináta-rendszerben megfelelően pozícionáljuk, és az alakzathoz rendeljük. Az előre megválasztott koordináta-rendszer lesz az eredményül kapott összetett alakzat
koordináta-rendszere. Ezt nevezzük globális koordináta-rendszernek Minden komponensnek van saját koordináta-rendszere, amelyben definiáltuk. Ezt lokális koordináta-rendszernek nevez- 12 zük. Ha egy komponenst a globális koordináta-rendszerben forgatással és eltolással a megfelelő helyre teszünk, akkor lokális koordináta-rendszerének kezdőpontját és bázisvektorait kell megadnunk a globális koordináta-rendszerbeli koordinátáival. A szóban forgó komponensnek az alakzathoz való rendelése azt jelenti, hogy ki kell számítani a komponens pontjainak új, a globális koordináta-rendszerre vonatkozó koordinátáit, vagyis koordináta-transzformációt kell elvégezni. Ha a két koordináta-rendszer bázisvektorai megegyeznek, akkor a koordinátatranszformáció eltolás 13 4 A KÖZELÍTŐ POLIÉDEREK ADATRENDSZERE Ha a felületek származtatásánál a meghatározó görbéket (meridiángörbe, vezérgörbe) poligonnak tekintjük, és csak a poligon
csúcsaira végezzük el a felületet előállító geometriai műveleteket, akkor nem kapjuk meg a felület minden pontját, csak egy, a felületen elhelyezkedő ponthalmazt vagy szakaszsereget. A csavarfelületnek nem állítjuk elő az összes alkotóegyenesét, csak a csavarmozgás egyenlő szögelfordulásaihoz tartozó alkotószakaszokat. Ha ezeknek az azonos csavarvonalon fekvő végpontjait egyenes szakaszokkal összekötjük, akkor egymáshoz csatlakozó térbeli (torz) négyszögeket kapunk. Zérus menetemelkedésnél síknégyszögek keletkeznek, amelyek egy poliéderfelületet alkotnak. A forgásfelületek generálásánál a meridiángörbe adott számú pontját forgatjuk el a tengely körül egyenlő szögértékekkel Ezáltal minden pont a körpálya helyett szabályos sokszöget ír le. Az a négy pont, amely a meridiánpoligon két szomszédos csúcspontjából két egymás utáni szögelfordulással áll elő, egy síknégyszöget alkot Ha tehát az egész
meridiánpoligonnak az adott szögtartomány egy egyenletes felosztásához tartozó szögértékkel való elforgatott helyzeteit állítjuk elő, akkor a forgásfelületet egymáshoz csatlakozó síklapokból álló poliéderfelülettel helyettesítjük. Az általános hengerfelület előállításánál a vezérgörbét helyettesítő poligon csúcspontjaiba toljuk el az alkotóvektort, és az alkotóegyeneseknek csak ezen vektor által meghatározott szakaszát tekintjük a felülethez tartozónak. Két szomszédos alkotószakasz a megfelelő végpontjaikat összekötő poligonélekkel együtt egy paralelogrammát alkot. A felületet ezekkel az egymáshoz csatlakozó síklapokkal helyettesítjük. Hasonlóképpen közelítjük az általános kúpfelületnek a vezérgörbe és a csúcspont közé eső darabját egy poliéderfelülettel Itt az alappoligon élei és a kúp csúcspontja határozzák meg az egymáshoz csatlakozó háromszöglapokat A felületeket helyettesítő
poliéderfelületek annál jobban közelítik a felület alakját, minél sűrűbb felosztást veszünk a felületet meghatározó görbéken, ill. szögtartományon A felosztások sűrítésével, azaz a pont- és lapszám növelésével növekszik a felületet leíró adatmennyiség és a számítási idő is. A felület egyértelmű numerikus leírásához ugyanis a közelítő poliéderfelület minden csúcspontját, élét és lapját meg kell határozni. 14 5 A MEGJELENÍTÉS MÓDSZEREI 5.1 MERŐLEGES NÉZETEK EGYMÁSRA MERŐLEGES KÉPSÍKOKON Valamely alakzatról készített egy merőleges vetület nem ad elegendő információt az alakzat formájáról és különböző irányú méreteiről. Az ábrázoló geometriai és műszaki szerkesztéseknek egyik alapvető módszere, hogy egymásra merőleges képsíkokat veszünk fel, azokra az alakzatokat merőlegesen vetítjük, és két vagy több egymáshoz kapcsolt (rendezett) vetületen szerkesztünk. 5.2 AXONOMETRIKUS
LEKÉPEZÉSEK Az axonometrikus leképezés olyan párhuzamos vetítés, ahol a képszerkesztés az alakzathoz rögzített derékszögű koordináta-rendszer vetületéhez kapcsolva történik. A képsík, amelyre az alakzatot a koordináta-rendszerével együtt vagy merőlegesen, vagy ferdén, de egymással párhuzamos vetítősugarakkal vetítjük. A képet a vetítősugarak képsíkkal párhuzamos döféspontjai alkotják 5.21 ORTOGONÁLIS AXONOMETRIA Ortogonális axonometrikus vetítés esetén a koordinátatengelyek vetületét úgy kell megadnunk, hogy egymással páronként tompa szöget zárjanak be. Ezek a vetületek azzal a kikötéssel együtt, hogy a vetítés iránya a képsíkra merőleges, meghatározzák a tengelyek egységszakaszainak q x , q y , q z vetületeit, amelyet tengelyirányú rövidüléseknek nevezünk 5.1 ábra: Pont ortogonális axonometrikus leképezése A vetítés numerikus elvégzése azt jelenti, hogy kiszámítjuk a pont vetületének
koordinátáit a képsíkhoz rendelt koordináta-rendszerben. A P(x,y,z) pont vetületének az e 1 , e 2 bázisra vonatkozó (u,v) koordinátái: u=–q x ⋅xcosα+q y ⋅cosβ+c 1 v=q z z–q x ⋅xcosα–q y ⋅sinβ+c 2 ahol a q x , q y , q z a rövidülések értékei rendre a következők: 15 qx = qy = qz = 1 + ctg 2α ctg 2α + ctgα ⋅ ctgβ 1 cosβ 1 + ctgα ⋅ tanβ ctgα ⋅ ctgβ − 1 ctgα ⋅ ctgβ A vetítőegyenesek az e 3 bázisvektorral párhuzamosak. A CAD-rendszerekben az ortogonális axonometrikus leképezés meghatározásának gyakori módja, hogy az alakzat koordináta-rendszerében adjuk meg a vetítőirányt, amely meghatározza a rá merőleges képsíkot. FERDESZÖGŰ AXONOMETRIA Ha ferdeszögű (klinogonális) axonometriában szerkesztünk, akkor a tengelykereszt képét és a tengelyeken az egység vetületét is előírhatjuk. Ekkor a vetítés iránya nem merőleges a képsíkra 5.22 5.3 CENTRÁLIS PROJEKCIÓ A centrális projekciónál
(perspektív leképezésnek is nevezik) abból a helyzetből indulunk ki, hogy a képsík a koordináta-rendszer xy-síkja, a vetítési középpont pedig, amelyen mindegyik vetítőegyenes áthalad, a z tengelyen helyezkedik el a képsíktól t távolságra. Ezt a helyzetet elérhetjük általános helyzetű képsík esetén, ha egy olyan bázistranszformációt hajtunk végre, amely által az új koordináta-rendszer xy-síkja a képsíkra kerül. Ezután szükség lehet még egy eltolásra, ha a centrum nincs rajta a z tengelyen. 5.2 ábra: Pont centrális vetülete A P(x,y,z) pont centrális leképezéssel kapott vetületét P’ jelöli. P’-nek az e 1 , e 2 bázisra vonatkozó (u,v) koordinátáit hasonló háromszögek segítségével számítjuk ki, amely szerint t t u= x, v= y t−z t−z A vetítés irányát minden P pontra a CP egyenes irányvektora adja meg. 16 6 A CAD-RENDSZEREK FELÉPÍTÉSE ÉS TÍPUSAI Annak érdekében, hogy a mérnöki tervezés különböző
műveleteit számítógéppel végezhessük el, a művelet tárgyát olyan rendezett adathalmazzal kell leírni, amely a számítógép számára közvetlenül érthető. Az ilyen módon definiált alakzatot számítógépi modellnek, a meghatározó adathalmazt adatrendszernek vagy adatstruktúrának, a modell előállítását pedig modellezésnek nevezik A CAD-rendszerek (Computer Aided Design) a számítógépi geometriai modellezésre szolgáló grafikus rendszerek, amelyek tartalmazzák a számítógéphez csatolt grafikus eszközök működtetéséhez szükséges eljárásokat, a felhasználó által tervezett geometriai alakzatok numerikus leírására és a geometriai manipulációk elvégzésére szolgáló algoritmusokat, az alakzatokról készített képek előállítását és feldolgozását végző utasításokat, továbbá más grafikus vagy gyártó rendszerek számára adatbázisokat készítő eljárásokat. felhasználó utasítások szintje adatbázis eljárások
szintje eszközök szintje operációs rendszer input eszközök output eszközök 6.1 ábra: A grafikus rendszer szoftverrétegei Bármennyire is sokfélék a grafikus rendszerek, szerkezetükben három egymásra épülő réteget különböztetünk meg: eszközszint, az eljárások szintje és az utasítások szintje. Az eszközszint (device level) tartalmazza az input és output eszközöket aktiváló (driver) és az azokhoz való adatátvitelt végző eljárásokat. Ilyenek az eszközparaméterek standard és aktuális értékeinek lekérdezését végző input eljárások Tartalmaz továbbá egyszerű rajzoló eljárásokat és képelemek attribútumainak beállítását végző eljárásokat Az eszközszinthez tartozó grafikus eljárásokat tartalmazó programcsomagok adott számítógép-konfigurációkra és programozási nyelvekre készülnek. Az eljárásszint (procedural level) összetettebb grafikai és geometriai problémák megoldására és az adatbázis
kezelésére szolgáló algoritmusokat tartalmaz. Ez a szoftverréteg eszközfüggetlen, de függ a programozási nyelvtől, és tartalmaz az alkalmazásokra irányuló elemeket is. A legfelső szint, amelyet az utasítások szintjének (functional level) nevezünk, a speciális alkalmazási célokra szolgáló grafikus és geometriai szerkesztőeljárásokat tartalmazza. Ez a 17 réteg jelenik meg a felhasználó számára CAD-rendszerként, amely ideális esetben eszközfüggetlen, és használatához nem szükségesek programozási ismeretek. 6.1 A SZÁMÍTÓGÉPI GEOMETRIAI MODELLEZÉS MŰVELETEI input adatok definíció geometriai műveletek modellfile leképezés modellfile képfile segédfile-ok 6.2 ábra: A geometriai modellezés műveletei Az első fázis a modellek definiálása. Ennek eredményeként létrejön a modell numerikus leírására szolgáló adatrendszer, amelyet egy név szerint hívható modellfile tartalmaz. A modellek definiálásának módja a
különböző CAD-rendszerekben eltérő Egyes esetekben a képernyőn grafikus segédeszközökkel való képmanipulációk szükségesek a modellek generálásához, más esetekben numerikus bemenő adatok és speciális parancsnyelven kiadott utasítások szükségesek. Ezek mind programozástechnikai különbségek Tartalmilag különböznek egymástól a következő definiálási módszerek: Meghatározott alakú alaptestek, illetve felületek generálása szabadon választható méreteik megadásával. Ezek a rendszer építőelemei, amelyek lehetnek egyszerű vagy összetettebb geometriai alakzatok. Előírt transzformációval valamely síkidomból való modellgenerálás. A transzformáció lehet egyenes vagy görbe mentén való eltolás, így keletkeznek a transzlációs felületek, vagy lehet tengely körüli forgatás, amelynek eredményeként forgásfelületek, ill. forgástestek állnak elő Egyes rendszerek megengednek más generátorokat is (pl. csavarmozgás)
Adott ponthalmazra vagy vonalseregre való felület illesztése, ahol a modell egyértelmű meghatározásához vagy a rendszer, vagy a felhasználó választ peremfeltételeket, amelyek többnyire különböző érintővektorok. Így állnak elő a foltokból öszszerakott ún szabad formájú felületek A közvetlenül csúcspontokból, élekből és lapokból való építkezés. Vetületekből való modellkonstrukció. A második műveletcsoportba tartoznak a geometriai manipulációk, amelyek egy vagy több, már definiált modellen működnek, és egy új modellt eredményeznek. Ezek lényegében három csoportra oszthatók: Transzformációk, amelyek egy modellen hatnak, és definiálásukhoz bemenő adatként a transzformációk paramétereinek értékeit is meg kell adni. Építkezés több modellből. Ennél a műveletnél a felhasználó a szerkesztendő modell (globális) koordináta-rendszerében elhelyezi az egyes részeket, vagyis azokat saját
(lokális) koordináta-rendszerükkel pozícionálja. Ezután a rendszer összefűzi a részmodellek adatrendszereit, ami gyakorlatilag koordináta-transzformációkat és a 18 pontok, élek, lapok átszámozását jelenti. Az így keletkező összetett, nem feltétlenül összefüggő alakzat a további műveletek számára egyetlen modellfile-ként szerepel. Két vagy több modellen végzett halmazműveletekkel (Boole-műveletek) való modellszerkesztés. Ezek a halmazműveletek alakzatok egyesítésének (unió), közös részének (metszet) és két alakzat különbségének meghatározását jelentik A halmazműveletekkel definiált modell adatrendszerének a komponensek adataiból való előállítása nagyon számításigényes művelet a fellépő új csúcspontok, élek és lapok miatt. Minden alakzatra működő általános megoldás nem létezik, de több CADrendszer tartalmaz síklapokkal határolt testekre kidolgozott algoritmusokat A geometriai manipulációk
elvégzésével párhuzamosan célszerű a bemenő adatokat és a műveleteket segédfile-okba kiírni, mert ezáltal a szerkesztések reprodukálhatók és könnyen módosíthatók. Ezek a segédfile-ok többnyire szerkeszthető szövegfile-ok A harmadik műveletcsoportba tartoznak a leképezések, amelyek eredményeként a vetítendő modell adatrendszeréből és a vetítés paramétereinek input értékeiből előáll a modell képe. A kép egy kétdimenziós geometriai alakzat, amelynek adatait, vagyis a képelemeknek a képernyő koordináta-rendszerére vonatkozó koordinátáit és egyéb attribútumait a rendszer képfile-ba írja ki. Ez lényegében kétféleképpen történhet: vagy a vetületként előálló képelemek adatai kerülnek a képfile-ba, vagy a képernyő felbontásának megfelelően az összes képpont aktuális jellemző értéke íródik ki a további feldolgozás eszközeitől és céljától függően 6.2 MODELLEZÉS DISZKRÉT ÉS ANALITIKUS MÓDSZEREKKEL
A CAD-rendszereket többféle szempont szerint osztályozhatjuk. Az általunk definiálható modellek dimenziószáma szerint vannak 2D-s, 2,5D-s és 3D-s rendszerek. A 2D-s rajzoló rendszerekben csak síkbeli alakzatok értelmezhetők. A 2,5D-s rendszerek hengeres alakzatokat képesek kezelni, ahol az összes alkotó iránya megegyezik, ezért a modelleket az alaplapjuk és a magasság számértéke egyértelműen definiálja A 3D-s rendszerek viszont térbeli struktúrákkal működnek. Ettől a felosztástól függetlenül a CAD-rendszereket két csoportra lehet osztani aszerint, hogy a modellek leírása diszkrét vagy analitikus adatrendszerrel történik-e. 6.21 MODELLEZÉS DISZKRÉT ADATRENDSZERREL Diszkrét adatokból áll a poliéderek adatrendszere, amelyben az alakzat minden pontja, éle, és lapja fel van sorolva. A különböző CAD-renszerekben a poliéder adatrendszerek a topológiai adatok szerkezetében különböznek egymástól. A poliédereken működő
algoritmusok hatékonysága nagyrészt attól függ, hogy milyen gyorsan lehet az aktuális adatrendszerből a szükséges topológiai információkat összegyűjteni. Egy egészen másfajta adatrendszer az „oktáns-fa”, melynek lényege, hogy a térbeli alakzatot kockákból építik fel, amelyeknek méretét addig finomítják, amennyire azt az alakzat megkívánja. Az összes kockát egy fa alakú gráfba rendezik, amelyet azután különböző szerkesztő és leképező algoritmusok feldolgoznak. A diszkrét adatrendszerek általában igen terjedelmesek, bizonyos eljárások programozására nagyon célszerűek, de nem alkalmasak görbevonalú felületek egzakt leírására. 6.22 MODELLEZÉS ANALITIKUS RENDSZEREKKEL Analitikus leírási módot, azaz függvényekkel való előállítást használnak sima görbék és felületek numerikus definiálására. Az adatrendszer az alappontok (kontrollpontok) halmazát és a konkrét függvényt tartalmazza, amely az adott
ponthalmazból és peremfeltételekből a kívánt görbét, ill. felületet generálja Ez a generálás kétféleképpen történhet Az interpolációnál a görbe, ill felület áthalad az 19 adott pontokon, az approximációnál általában nem halad át, de bizonyos értelemben közel halad az adott pontokhoz. Mindkét szerkesztési módra sokféle, a gyakorlatban is jól bevált megoldás született. A modelleket leíró spline-függvényeknek legtöbbször a paraméteres előállítását használják: görbék megadására egyparaméteres, felületek megadására kétparaméteres függvényeket. Az Hermit-féle harmadfokú vektorspline interpolációs feladat megoldására alkalmas. Ha csak két alappontot adunk meg a p 0 és p 1 helyvektorokkal és peremfeltételként e pontokban két vektort, a p’ 0 ill. p’ 1 vektorokat, akkor az r(t)=p 0 ⋅(1-3t2+2t3)+p 1 ⋅(3t2-2t3)+p’ 0 (t-2t2+t3)+p’ 1 ⋅(–t2+t3), (0≤t≤1) vektorfüggvény egy olyan görbét ír le,
amelynek kezdőpontja p 0 , végpontja p 1 és ezekben a pontokban az érintővektorai p’ 0 ill. p’ 1 A görbét tekinthetjük egy mozgó pont pályájának, amely a t=0 időpillanatban p’ 0 sebességgel indul a p 0 pontból és p’ 1 sebességgel érkezik a p 1 pontba. A t paraméter tehát ebben a felfogásban az időt jelenti, és az r(t) helyvektor adja meg, hogy hol van a pont a t időpillanatban. A görbe alakját a két érintővektor hosszának változása úgy befolyásolja, hogy rövidebb vektorokkal laposabb görbét kapunk. Ha a két alappont távolságához képes viszonylag hosszú érintőket írunk elő, vagyis a mozgó pont nagy sebességgel futja be a görbét, akkor a görbe hurok alakot vehet fel Több alappontra illeszkedő köbös Hermit-spline meghatározásához az alappontok helyvektorait, továbbá az első és utolsó pontbeli érintővektorokat kell megadni. Ezekből az adatokból ívenként (szegmensenként) előállítható egy olyan görbe, ahol a
szegmenseket leíró vektorfüggvény alakja a fentivel megegyezik, és az egész görbe sima, vagyis a görbeívek közös érintővel csatlakoznak az alappontokban, továbbá a görbület is folytonos lesz. A Bézier-féle harmadfokú vektorspline az egyik legegyszerűbb megoldás görbe approximációjára. Egy ív meghatározásához négy kontrollpontot kell helyvektoraival megadni Legyenek ezek p 0 , p 1 , p 2 , p 3 Az r(t)=(1–t3)p 0 +3t(1–t)2p 1 +3t2(1–t)p 2 +t3p 3 , (0≤t≤1) vektorfüggvény olyan görbeívet ad meg, amely áthalad az első (p 0 ) és utolsó (p 3 ) pontokon, és jól követi a négy pont által meghatározott karakterisztikus poligon alakját úgy, hogy annak első és utolsó éle érinti a görbét. 6.3 ábra: Bézier-görbék A kontrollpontok függvényszorzóit súlyfüggvényeknek nevezzük. 20 Több pont megadása esetén úgy állíthatunk elő harmadfokú Bézier-ívekből sima görbét, hogy a csatlakozó szegmensek karakterisztikus
poligonjainak két szomszédos élét egy egyenesen választjuk. A Bézier-spline-ok jól alkalmazhatók görbék számítógépes feldolgozására, mert a meghatározó pontok kényelmesen definiálhatók, a görbe alakja jól elképzelhető, és a polinom függvények könnyen számíthatók. Hátránya, hogy egy pont megváltoztatása után az egész görbét újra kell számítani. Sokkal rugalmasabban kezelhető a B-spline görbe, amely szintén alappontokkal és súlyfüggvényekkel van definiálva, továbbá egyaránt alkalmas interpolációra és approximációra. Bizonyos módon választott további, ún. „fantompontokkal” ugyanis el lehet érni, hogy a görbe áthaladjon kiválasztott alappontokon Legfőbb előnyei, hogy akárhány pontot adunk meg, nem kell szegmensekben gondolkodnunk, mert azokat a függvény generálja, továbbá egy pont meghatározása esetén nem kell az egész görbét újra számítani, hanem harmadfokú esetben csak a szóban forgó pont körüli
négy paraméterintervallumon. Felületeket kétparaméteres vektorfüggvényekkel lehet leírni. Egy kétparaméteres bikubikus (minkét változóban harmadfokú) vektorfüggvény általános alakja a következő: r(u,v)=x(u,v)i+ y(u,v)j+ z(u,v)k ahol mindegyik koordinátafüggvény egy s(u,v)=a 00 +a 01 v+a 02 v2+a 03 v3 +a 10 u+a 11 uv+a 12 uv2+a 13 uv3 +a 20 u2+a 21 u2v+a 22 u2v2+a 23 u2v3 +a 30 u3+a 31 u3v+a 32 u3v2+au3v3 kétváltozós polinom természetesen különböző együtthatókkal. A felületábrázolásnak jól bevált módszere a paramétervonalak hálózatának megrajzolása. A paramétervonalak az u=u 0 és a v=v 0 egyeneseknek az r(u,v) leképezéssel keletkező képei (u 0 ,v 0 ) állandók. Ezek felületi görbék, amelyeknek egyparaméteres vektoregyenlete r(u 0 ,v), ill. r(u,v 0 ) A bikubikus felületdarabokkal kapcsolatban felmerülő gyakorlati kérdés az is, hogy milyen adatokkal célszerű definiálni. Az algebrai együtthatók értékeinek közvetlen
megadása lenne egy definiálási mód, ami tervezési feladatokban nem célszerű. Ehelyett a felületdarabokat ponthalmazzal és esetleg még peremfeltételekkel határozzák meg. A ponthalmazt azután a generált felület interpolálja vagy approximálja. Ezen kívül szokásos eljárás még egy adott görbeseregre való felület illesztése is. Az alkalmazásokban előforduló felületek általában nem írhatók le egyetlen vektorfüggvénnyel, ezért azokat egy alkalmas felosztással több, egymáshoz jól csatlakozó foltból szerkesztik. 6.3 ADATRENDSZEREK SZERKEZETE, DRÓTVÁZAS MODELLEK, FELÜLET- ÉS TESTMODELLEK Az adatrendszerek szerkezeti felépítése lényegében háromféle lehet: Drótvázas vagy más néven élmodelleket generálnak a 2D-s rajzoló rendszerek, a 2,5D-s tervező rendszerek és a régi fejlesztésű 3D-s főként poliédermodellező rendszerek. Ezek a rendszerek minden modellt az éleivel írnak le, ami térbeli alakzatok esetén természetesen
nem kielégítő Emiatt a ma használatos CADrendszerekben a drótvázas modell csak munka közbeni segédábrák, ideiglenes vázlatok előállítására szolgál Az összes él vetületét tartalmazó drótvázas ábrák elkészítéséhez ugyanis elegendő a csúcspontok vetületét meghatározni, ami nagy modellekre is gyorsan elvégezhető Felületmodell áll elő, ha felületi adatstruktúra írja le a rendszer által generált modell határoló felületét, amely síklapokból áll a poliédermodellek, és pontokból áll a szabad formájú felületek esetén. Ezek az adatrendszerek a felületelemeket meghatá- 21 rozó topológiai adatokat tartalmazzák, és a térbeli alakzatokat mindig egyértelműen meghatározzák. A testmodelleket vagy más néven térfogatmodelleket tipikusan olyan rendszerek állítják elő, ahol csak előre definiált primitívekből lehet szerkeszteni. A testmodell egy összetett alakzatot egy speciális szerkezetű gráffal ír le, ahol a
fa egyélű csúcsaiban a primitívek, a csomópontokban pedig a szerkesztésekhez szükséges geometriai manipulációk, azaz halmazműveletek és transzformációk vannak. Ez a struktúra numerikusan tömören leírható, és a modellt mint ponthalmazt egyértelműen állítja elő. Mivel a különböző szerkezetű adatrendszereken más-más algoritmusok működnek hatékonyan, ezért a fejlettebb CAD-rendszerek ún. hibrid modelleket állítanak elő Ez azt jelenti, hogy az alakzatok definiálásakor létrehozzák az alakzatot reprezentáló felületmodellt és testmodellt is, és a különböző operációkat a megfelelő adatrendszereken hajtják végre. Az egyik adatrendszerről a másikra áttérés ugyanis matematikailag nem mindig lehetséges, de ha megoldható is, nagyon számításigényes eljárás. 6.4 A LÁTHATÓSÁG SZERINT VALÓ ÁBRÁZOLÁS ELJÁRÁSAI Egy térbeli alakzatról készített szemléletes kép megkülönbözteti az alakzat látható részeit a nem
láthatóktól, vagy csak a látható éleket tartalmazza. A láthatóság eldöntéséhez minden esetben a modellen és a képernyőn (képtérben) is vizsgálatokat kell elvégezni, de hogy mi látszik, csak a térben dönthető el. A láthatósági problémák eldöntésére nem létezik egy mindenkor érvényes legjobb algoritmus, mert a számítási módszerek függenek egyrészt az adatrendszer típusától és szerkezetétől, másrészt attól, hogy vonalas vagy raszteres képet állítanak elő. Legegyszerűbb a konvex poliéderek látható éleinek és lapjainak a kiválasztása paralel projekció esetén. Láthatók ugyanis a szemlélő felé forduló lapok élei Ezeket a lapokat a kifelé irányított normálvektoroknak a vetítősugarakkal bezárt szöge szerint lehet kiválasztani. Ha ez a szög tompaszög, akkor a szóban forgó lap és az élei látszanak, ha hegyesszög, akkor a lap nem látszik, de a látható lapokhoz csatlakozó élei igen. Ezt a vizsgálatot a nem
konvex alakzatok láthatóságának eldöntésére kidolgozott algoritmusok is elvégzik a biztosan nem látható élek kiszűrésére. Görbevonalú felületekkel határolt alakzatok ábrázolásánál gyakori módszer, hogy az alakzatot egy közelítő poliéderrel helyettesítik, és a poliédert ábrázolják. 6.5 A GRAFIKUS RENDSZEREK KÖZÖTTI ÁTVITEL KÉRDÉSEI A számítógépi modelleket leíró adatrendszerek különbözősége miatt az egyik CADrendszerrel szerkesztett modell adatait egy másik CAD-rendszer általában közvetlenül nem tudja beolvasni és értelmezni. E nehézségek elkerülésére készülnek az adatkonvertáló interfész programcsomagok, amelyek nemzetközi normáknak megfelelő adatrendszerrel írnak le bizonyos számítógépi modelleket. Így ha két CAD-rendszer rendelkezik ugyanazzal az interfésszel, akkor közöttük azok a modellek átvihetők, amelyeket az interfész tartalmaz. A modellt definiáló információk egységes leírására
szolgáló adatfile-ok szerkezetének kérdését, ami a számítógépi modelleknek a grafikus rendszerektől való függetlenségét célozza, elválasztották az alapszoftver kérdésétől. Ezen elképzelés szerint a modellező rendszer által generált adatrendszert az interfészben rögzített formában egy ún. neutrális modellfile tartalmazza, a képet definiáló grafikus információkat pedig a grafikus alapszoftver segítségével létrehozott neutrális képfile tartalmazza. A gyakorlatban a CAD-rendszerek között, továbbá egyes CAD-rendszerek és felhasználói rendszerek kötött sokszor speciális, a szóban forgó modellekre fejlesztett adatkonvertáló programokkal végzik el az adatátvitelt. Gyakori megoldás az is, hogy közvetlenül és széleskörűen 22 elterjedt szerkesztőrendszerhez készítenek interfészt a modelladatok, ill. képfile-ok további feldolgozására. 23 7 CAD-KÖRNYEZET Az alkalmazások szempontjából felmerülő alapkérdés,
hogy hogyan lehet egy CADrendszerrel létrehozott geometriai modellt a gyártó rendszerekkel feldolgozni. A gyártási folyamatokhoz szükséges geometriai információk átvitelére a gyártási folyamatba integrált modellező és megmunkáló rendszer közötti interfész szolgál A különböző felhasználói rendszerek számára más-más geometriai információk szükségesek, amelyeket maguk is további geometriai számításokkal egészítenek ki 7.1 CAD-RENDSZER FELÜLETMEGMUNKÁLÓ NC-GÉPEK A számítógéppel vezérelt NC (Numeric Control) gépek a szerszámfejnek a felület mentén való mozgatásával állítják elő a tervezett munkadarabot. A szerszámpálya kiszámításához szükséges a megmunkálandó felület és a tervezett felület numerikus leírása, továbbá a szerszámfej mérete, mozgási szabadságfoka és különböző technológiai adatok. Ilyen számításokra az analitikusan leírt felületmodellek alkalmasak, a szerszámpálya ekkor felületi
görbe vagy görbesereg. A szerszámfejnek a munkadarabhoz való illesztése annál rugalmasabb, minél nagyobb a térbeli mozgási szabadságfoka, amit azzal jellemeznek, hogy hány különböző irányban mozgatható el. 7.2 CAD-RENDSZER VÉGESELEM-RENDSZEREK Ha egy síkbeli lemezmodell vagy egy térbeli modell belső pontjaiban bizonyos fizikai jellemzőket (hőeloszlás, erőeloszlás, feszültség stb.) kell meghatározni, amelyek adott környezeti behatásokra (melegítés, megterhelés, hajlítás stb) keletkeznek, akkor célszerű a modellt egyszerű alakú, viszonylag kisméretű, ismert fizikai tulajdonságú elemi részek halmazával helyettesíteni, és a szükséges számításokat ezekre elvégezni. Ezt a módszert nevezik végeselem módszernek, amellyel egy gyártmány használhatóságát vizsgálják meg. A végeselem analízist vagy egy elkészített mintadarabon, vagy a CAD-rendszerek felhasználásával egy számítógépi modellen végzik el. A CAD-rendszerek
integrálásával a gyártmány vizsgálata a következő elemekből áll: 1. a számítógépi modell előállítása 2. az elemi részekkel való közelítés (végeselem-háló generálása) 3. a fizikai behatások, anyagi tulajdonságok, peremfeltételek megadása 4. a kívánt fizikai értékek kiszámítása minden elemre 5. az eredmények szemléltetése Ha a modellező rendszer nem tartalmazza a végeselem-háló generálását, akkor azt egy ún. preprocesszor végzi el, amely a modelladatokat valamilyen interfészen keresztül kapja, és az elemi részek halmazát adja tovább. A 3 és a 4 fázist a végeselem-rendszer végzi el, amely vagy képes az eredmények grafikus megjelenítésére, vagy azt egy ún. posztprocesszor végzi el. Összetett modellekre a végeselem-háló elkészítése sokkal gazdaságosabban oldható meg, ha nemcsak a modell adatstruktúrája, hanem szerkesztési módja is ismert. Ezért több olyan CAD-rendszert is kifejlesztettek, amelyek a modell
definiálásával egyidejűleg a végeselemhálót is generálják, sőt bizonyos fizikai jelenségekre vonatkozó végeselem-analízist is el tudnak végezni. 7.3 CAD-RENDSZER ROBOTSZIMULÁLÓ RENDSZEREK Az ipari robotok számítógéppel való megtervezése lényegében geometriai és kinematikai számításokból áll. A munkadarabot és az azt megmunkáló robotot, ill ezek számítógépi modelljeit egy ún gyártócellában helyezik el A munkadarab geometriai adatait, amelyeket egy CAD-rendszer szolgáltat a megfelelő interfészen keresztül, a megmunkálás szimulálásához 24 még további geometriai és gyártástechnológiai adatokkal egészítik ki. A robot mint számítógépi modell leírásához a geometriai adatokon kívül még lehetséges mozgásokat, ill mozgássorozatokat és technológiai jellemzőket is megadnak Ha a munkadarab és a robot modellje már a gyártócellában van, a megmunkálási folyamat megtervezése, vagyis a szimulált robot által
elvégzendő műveletsor kiszámítása következik. A tervezett mozgások minden időpillanatában meg kell határozni a robot szerszámfejeinek a munkadarabhoz viszonyított kölcsönös térbeli helyzeteit az optimális pályagörbék kialakítására. A robot által végzett mozgások egy részének sorrendjét a robot szerkezete és a gyártási folyamat meghatározza, de az egész kinematikai láncnak egy adott tényező szerint való optimalizálása a robotszimulálás egyik legfontosabb művelete. A számítógéppel vezérelt gyártási folyamatban részt vevő CAD-rendszert és a rá épülő megmunkáló rendszert összefoglalóan CAM-rendszernek (Computer Aided Manufactoring) nevezik. 25 TARTALOMJEGYZÉK 1 DERÉKSZÖGŰ KOORDINÁTA-RENDSZEREK 1 1.1 DESCARTES-FÉLE KOORDINÁTÁK 1.2 KOORDINÁTATRANSZFORMÁCIÓK 1.21 A KOORDINÁTA RENDSZER ELTOLÁSA 1.22 A KOORDINÁTA-RENDSZER ELFORGATÁSA 1.23 A HOSSZEGYSÉGEK MEGVÁLTOZTATÁSA A KOORDINÁTATENGELYEKEN (SKÁLÁZÁS)
1.24 ÖSSZETETT TRANSZFORMÁCIÓK 1.3 HOMOGÉN KOORDINÁTÁK 1 1 1 2 2 3 3 2 5 TÉRBELI ALAKZATOK TRANSZFORMÁCIÓI 2.1 LINEÁRIS TARNSZFORMÁCIÓK, PONTTRANSZFORMÁCIÓK 2.2 EGYENES KÖRÜLI FORGATÁS 2.3 SÍKRA VONATKOZÓ TÜKRÖZÉS 2.4 NYÚJTÁS, ZSUGORÍTÁS A KOORDINÁTATENGELYEK IRÁNYÁBAN 2.5 MERŐLEGES VETÍTÉS 2.51 VETÍTÉS A KOORDINÁTASÍKOKRA 2.52 MERŐLEGES VETÍTÉS ORIGÓN ÁTHALADÓ ÁLTALÁNOS HELYZETŰ SÍKRA 2.6 PONTTRANSZFORMÁCIÓK FELÍRÁSA HOMOGÉN KOORDINÁTÁKKAL 5 5 6 7 7 7 7 9 FELÜLETEK MEGHATÁROZÓ ADATAI ÉS ELŐÁLLÍTÁSA 10 3 3.1 3.2 3.3 3.4 3.5 CSAVARFELÜLETEK FORGÁSFELÜLETEK ÁLTALÁNOS HENGERFELÜLETEK ÁLTALÁNOS KÚPFELÜLETEK ÖSSZETETT ALAKZATOK SZERKESZTÉSE 10 10 11 11 11 4 A KÖZELÍTŐ POLIÉDEREK ADATRENDSZERE 13 5 A MEGJELENÍTÉS MÓDSZEREI 14 5.1 MERŐLEGES NÉZETEK EGYMÁSRA MERŐLEGES KÉPSÍKOKON 5.2 AXONOMETRIKUS LEKÉPEZÉSEK 5.21 ORTOGONÁLIS AXONOMETRIA 5.22 FERDESZÖGŰ AXONOMETRIA 5.3 CENTRÁLIS
PROJEKCIÓ 14 14 14 15 15 6 16 6.1 A CAD-RENDSZEREK FELÉPÍTÉSE ÉS TÍPUSAI A SZÁMÍTÓGÉPI GEOMETRIAI MODELLEZÉS MŰVELETEI 17 26 6.2 MODELLEZÉS DISZKRÉT ÉS ANALITIKUS MÓDSZEREKKEL 6.21 MODELLEZÉS DISZKRÉT ADATRENDSZERREL 6.22 MODELLEZÉS ANALITIKUS RENDSZEREKKEL 6.3 ADATRENDSZEREK SZERKEZETE, DRÓTVÁZAS MODELLEK, FELÜLET- ÉS 18 18 18 TESTMODELLEK 6.4 A LÁTHATÓSÁG SZERINT VALÓ ÁBRÁZOLÁS ELJÁRÁSAI 6.5 A GRAFIKUS RENDSZEREK KÖZÖTTI ÁTVITEL KÉRDÉSEI 20 21 21 7 23 7.1 7.2 7.3 CAD-KÖRNYEZET CAD-RENDSZER FELÜLETMEGMUNKÁLÓ NC-GÉPEK CAD-RENDSZER VÉGESELEM-RENDSZEREK CAD-RENDSZER ROBOTSZIMULÁLÓ RENDSZEREK TARTALOMJEGYZÉK 23 23 23 25
 When reading, most of us just let a story wash over us, getting lost in the world of the book rather than paying attention to the individual elements of the plot or writing. However, in English class, our teachers ask us to look at the mechanics of the writing.
When reading, most of us just let a story wash over us, getting lost in the world of the book rather than paying attention to the individual elements of the plot or writing. However, in English class, our teachers ask us to look at the mechanics of the writing.