Alapadatok
Év, oldalszám:1999, 14 oldal
Nyelv:magyar
Letöltések száma:46
Feltöltve:2010. március 26.
Méret:1 MB
Intézmény:
-
Megjegyzés:
Csatolmány:-
Letöltés PDF-ben:Kérlek jelentkezz be!
Értékelések
Nincs még értékelés. Legyél Te az első!




Tartalmi kivonat
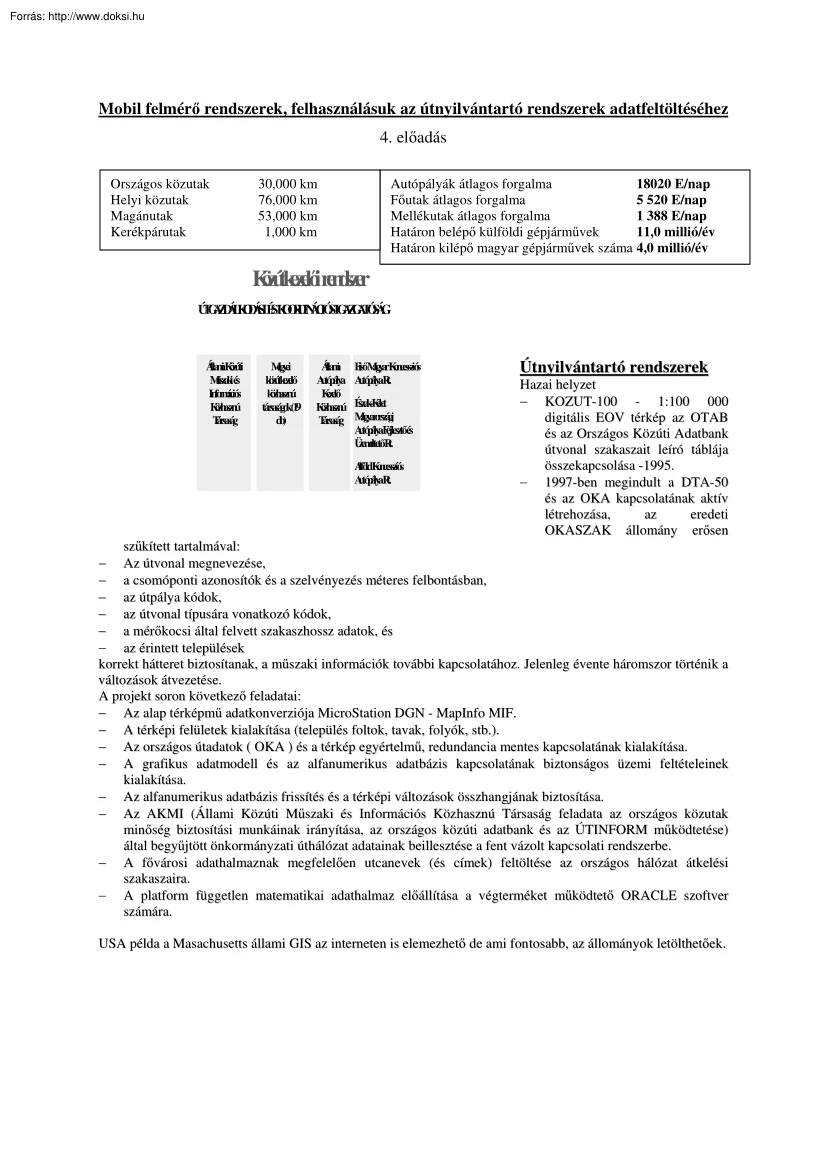
Mobil felmérő rendszerek, felhasználásuk az útnyilvántartó rendszerek adatfeltöltéséhez 4. előadás Országos közutak Helyi közutak Magánutak Kerékpárutak 30,000 km 76,000 km 53,000 km 1,000 km Autópályák átlagos forgalma 18020 E/nap Főutak átlagos forgalma 5 520 E/nap Mellékutak átlagos forgalma 1 388 E/nap Határon belépő külföldi gépjárművek 11,0 millió/év Határon kilépő magyar gépjárművek száma 4,0 millió/év Közútkezelőirendszer ÚTGAZDÁLKODÁSIÉSKOORDINÁCIÓSIGAZGATÓSÁG ÁllamiKözúti Műszakiés Információs Közhasznú Társaság Megyei közútkezelő közhasznú társaságok(19 db) Állami Autópálya Kezelő Közhasznú Társaság EisőMagyarKoncessziós AutópályaRt. Észak-Kelet Magyarországi AutópályaFejlesztőés ÜzemeltetőRt. AlfőldKoncesszíós AutópályaRt. Útnyilvántartó rendszerek Hazai helyzet KOZUT-10 0 - 1:100 000 KOZUT-100 digitális EOV térkép az OTAB és aazz Országos Közúti Adatbank
útvonal szakaszait leíró táblája összekapcsolása -1995. 1997-ben megindult a DTA-50 és az OKA kapcsolatának aktív létrehozása, az eredeti OKASZAK állomány erősen szűkített tartalmával tartalmával:: Az útvonal megnevezése, a csomóponti azonosítók és a szelvényezés méteres felbontásban, az útpálya kódok, az útvonal típusára vonatkozó kódok, a mérőkocsi által felvett szakaszhossz adatok, és az érintett települése k települések korrekt hátteret biztosítanak, a műszaki információk további kapcsolatához. Jelenleg évente háromszor történik a változások átvezetése. A projekt soron következő feladatai: Az alap térképmű adatkonverziója MicroStation DGN - MapInfo MIF. A térképi felületek kialakítása (település foltok, tavak, folyók, stb.) Az országos útadatok ( OKA ) és a térkép egyértelmű, redundancia mentes kapcsolatának kialakítása. A grafikus adatmodell és az
alfanumerikus adatbázis kapcsolatának biztonságos üzemi feltételeinek kialakítása. Az alfanumerikus adatbázis frissítés és a térképi változások összhangjának biztosítása. Az AKMI (Állami Közúti Műszaki és Információs Közhasznú Társaság feladata az országos közutak minőség biztosítási munkáinak irányítása, az országos közúti adatbank és az ÚTINFORM működtetése) által begyűjtött önkormányzati úthálózat adatainak beillesztése a fent vázolt kapcsolati rendszerbe. A fővárosi adathalmaznak megfelelően utcanevek (és címek) feltöltése az országos hálózat átkelési szakaszaira. A platform független matematikai adathalmaz előállítása a végterméket működtető ORACLE szoftver számára. USA példa a Masachusetts állami GIS az interneten is elemezhető de ami fontosabb, az állományok letölthetőek. A Masachusetts-i útréteg a USGS 1:100,000 DLG-k kiegészítve az útügyi igazgatóság (MHD)
vonalaival. Sok utat az MHD a városoktól kapott városi méretarányban. Minden objektumhoz hozzákapcsolták az MHD igen gazdag attribútum adatbázisát. A réteget a közeljövőben kicserélik az ortofotó program keretében meghatározott 1:5,000-es út tengelyvonalakkal, s ekkor az MHD nyilvántartás és utca attribútum adatok nagyobb méretarányú geometriai alaphoz fog csatlakozni. Az .AAT fájl a következő attribútumokat tartalmazza: megye kód) COUNTY-CODE: County Code (m A = Barnstable H = Hampshire B = Berkshire I = Middlesex C = Bristol J = Nantucket D = Dukes K = Norfolk E = Essex L = Plymouth F = Franklin M = Suffolk G = Hampden N = Worcester SERIAL NUMBER: útszegmens megyén belüli azonosítására CLASS: funkcionális és elérhetőségi osztályozás rajzolási célból. Classes are: 1 - Limited Access Highway 2 - Multi-lane Highway, not limited access 3 - Other numbered route 4 - Major road - connector 5 - Minor street or road 6 - Minor street or road 7 -
Track (from USGS DLGs) 8 - Trail (from USGS DLGs) ADMIN TYPE: Based on AUTO-RT-SIGN from MRD.INV file Types are: 1 - Interstate 2 - U.S Federal 3 - State 0 - Local road RT-NUMBER: Route number of the road type listed in ADMIN TYPE STREET NAME: Street name from the MRD.STREETS file LANES: Number of lanes on other side of divided highway; values greater than 1 indicate the road is divided; used in the coding of the CLASS item sávok, az osztály kódolásához * REDEFINED ITEMS átdefineált jellemzők CSN: County Code + Serial Number Used to uniquely identify any roadway segment within the entire state. Note: This item is the link to the road inventory file (mrd.inv) RT-POS1 The following seven items separate the characters in the RT-NUMBER item for plotting purposes. RT-POS2 RT-POS3 RT-POS4 RT-NUMBER3 RT-NUMBER2 RT-NUMBER1 The items for descriptions of street listings in the related file MHDRD.STREETS are: utcák leírása MHDRD.STREETS fájlban a következő mezőkkel CITY NUM: City
or Town Number Abington = 1 . Yarmouth = 351 RIN: Road Inventory Number. Used to uniquely identify any road within a given town STREET NAME: Street Name with Suffix FRM-ST-NUM: From RIN FRM-ST-NAME: From RIN name. Refers to either a road, a town or state line, a dead end, private property, or a cul-de-sac. TO-ST-NUM: To RIN TO-ST-NAME: To (RIN). See Item FRM-ST-NUM for description CITY RIN H: City or Town Number + Road Inventory Number (RIN). Used to uniquely identify any road within the entire state. Note: This item is the link to the road inventory file (mhdrdinv) OUTPUT: All fields The MHDRD.INV file stores information on the road inventory The items are: az útnyilvántartási fájl mezői 1 CITY NUM: City or Town Number Abington = 1 . Yarmouth = 351 város szám 2 RIN: Road Inventory Number. Uniquely identifies each road within a given town útnyilvántartási szám 3 FRM-ST-NUM: From Road Inventory Number (RIN) úttól szám xxxx = RIN Xxxx = Bordering town line, where X=1st
letter of bordering town name and xxx=CITY NUM 0000 = Dead end 00CT = CT state line 00NH = NH state line 00NY = NY state line 00RI = RI state line 00VT = VT state line 8888 = Private property 9999 = Cul-de-sac Note: From and To Road Inventory Number are for the entire road (RIN), not for the road segment (SERIAL NUMBER). 4 TO-ST-NUM: To Road Inventory Number (RIN) úthoz szám See Item # 3 (FRM-ST-NUM) for description 5 ADMIN SYS: Administrative System kezelő hivatal 1 = Massachusetts Highway Department 2 = City or town accepted road 3 = Metropolitan District Commission 4 = Massachusetts Turnpike Authority 5 = Massachusetts Port Authority 6 = State Park or Forest 7 = State institutional 8 = Federal Park or Forest 9 = County Institutional 0 = Unaccepted by city or town B = State college or university C = US Department of Defense D = US Army Corps of Engineers E = Federal Institutional F = Other Federal G = Federal Bureau of Indian Affairs H = Miscellaneous Bridges 6 FEDAID SYS:
National Highway System (NHS) Status 0 = Not on NHS 1 = NHS - Interstate 2 = NHS - Strategic Defense Highway System (STRAHNET) 3 = NHS - STRAHNET Connector 4 = NHS - Other 5 = NHS - Other - One-way pair 6 = NHS - Other truck route exclusion 7 = NHS connection to major intermodal terminal (proposed) 7 FEDAID-RT-NUM: Federal-Aid Route Number 8 FEDAID-UR-DESIG: Federal-Aid Urban/Rural Designation 1 = Urban city 2 = Urban town 5 = Rural town Note: A town may be partially urban and partially rural. 9 FUNC-CLASS: Functional Classification funkcionális osztályozás 0 = Local 1 = Interstate 2 = Rural principal arterial and Urban extensions 3 = Rural minor arterial and Urban extensions 4 = Other Urban principal arterial 5 = Urban minor arterial or Rural major collector 6 = Urban collector or Rural minor collector Note: Use urban/rural designation to interpret functional classification. 10 AUTO-RT-NUMBER: Auto Route Number autóút száma Interstate, US Highway, or State Numbered Highway
route number Note: If multiple routes exist on a section, the lowest number on the highest system is recorded (InterstateUSState); Other routes under hierarchy are listed in Item # 11 (ALT-RT-NUMBER). 11 ALT-RT-NUMBER: Alternate Route Number(s) All other routes under hierarchy of Item # 10 Note: Field begins and ends with a “+”, and routes are separated by “+”s. 12 D-SH-WID: Left Side Right Shoulder Width for DIVIDED Roadway Only bal nyom jobboldali padka szélessége Note: Width in feet. 13 D-SH-TYP: Left Side Right Shoulder Type for DIVIDED Roadway Only bal nyom jobboldali padka tipusa S = Stable - Unruttable compacted subgrade U = Unstable shoulder H = Hardened bituminous mix or penetration Note: Null = no left side right shoulder OR not a divided roadway OR no data. 14 DIV-L-SU-WID: Left Side Surface Width of Travel Lanes for DIVIDED Roadway Only bal nyom felület szélessége 0 = Not a divided roadway OR no data. Note: Width of traveled way in feet, excluding
shoulders/auxiliary lanes. 15 MED-WID: Median Width for DIVIDED Roadway Only 0 = Not a divided roadway OR No data közép szélesség Note: Width in feet; coded as 99, if over 100 feet. 16 DIV-L-NUM-TR-LA: Left Side Number of Travel Lanes for DIVIDED Roadway Only bal oldal nyomszáma 0 = Not a divided roadway OR No data 17 CURBS: Curbs szegélykövek 0 = None 1 = Left side only 2 = Right side only 3 = Both sides 4 = Along median only 5 = All curbs (divided highway) Note: For urban sections only. 18 L-SW-WID: Left Sidewalk Width bal járda szélesség 0 = No left sidewalk OR No data Note: For urban sections only; Width in feet. 19 R-SW-WID: Right Sidewalk Width jobb járda szélesség 0 = No right sidewalk OR No data Note: For urban sections only; Width in feet. 20 STREET-OPERATION: Street Operation út működés 0 = No data 1 = One-way traffic 2 = Two-way traffic 21 L-SH-WID: Median Shoulders Width for DIVIDED Roadway OR Left Shoulder Width for UNDIVIDED Roadway Note: Width in feet;
for DIVIDED roadways, median shoulders are assumed to have the same width. padka szélességek 22 L-SH-TYPE: Median Shoulders Type for DIVIDED Roadway OR Left Shoulder Type for UNDIVIDED Roadway See item # 14 (D-SH-TYP) for description Note: For DIVIDED roadways, median shoulders are assumed to have the same type. padka tipusok 23 SUR-WID: Right Side Surface Width for DIVIDED Roadway OR Surface Width for Entire UNDIVIDED Roadway 0 = No data Note: Coded as 99, if over 100 feet; Measurement of travelled way, excluding shoulders/auxiliary lanes. útpálya szélesség 24 SUR-TYP: Surface Type of Either DIVIDED or UNDIVIDED Roadway pálya felület tipusai 0 = No data 1 = Unimproved, graded earth, or soil surface road 2 = Gravel or stone road 3 = Brick road 4 = Block road 5 = Surface-treated road 6 = Bituminous concrete road 7 = Portland cement concrete road 8 = Composite road; flexible over rigid 9 = Composite road; rigid over flexible or rigid over rigid (‘white topping’) Note: For
both DIVIDED and UNDIVIDED roadways 25 R-SH-WID: Right Side Right Shoulder Width for DIVIDED Roadway OR Right Shoulder Width for UNDIVIDED Roadway Note: Width in feet. 26 R-SH-TYP: Right Side Right Shoulder Type for DIVIDED Roadway OR Right Shoulder Type for UNDIVIDED Roadway See Item # 14 (D-SH-TYP) for description 27 UNDIV-RRWY-#TRLA: Right Side Number of Travel Lanes for DIVIDED Roadway OR Total Number of Travel Lanes for UNDIVIDED Roadway 0 = No data 28 ACC CON: Access Control elérés irányítás 0 = No control 1 = Full control 2 = Partial control 29 TERRAIN: Terrain terep 0 = No data 1 = Level 2 = Rolling 3 = Mountainous 30 ROW-WID: Right of Way Width út jog szélesség 0 = No data Note: Width in feet. 31 SPEED LIMIT: Speed Limit sebesség korlátozás 0 = No data Note: Speed limit in miles per hour. 32 ODOM-READ: Cumulative Odometer Reading Note: In hundredths of a mile (xx.xx); This value does not represent section length. 33 URB-AREA: Urbanized Area urbanizált terület
URBANIZED AREAS A = Boston H = Pittsfield B = Brockton I = Providence-Pawtucket C = Fall River J = Springfield D = Fitchburg-Leominster K = Worcester E = Lawrence-Haverhill L = Taunton F = Lowell M = Hyannis G = New Bedford SMALL URBAN AREAS 1 = Athol R = Plymouth 5 = Spencer S = Greenfield 6 = Ware U = Southbridge O = North Adams V = Clinton-Lancaster Q = Gardner-Templeton Note: If NULL, roadway section is in RURAL area. 34 HPMS-CODE: HPMS Code 0 = Not an HPMS section nor on a road that has an HPMS section 1 = Not an HPMS section but is on a road that has an HPMS section 2 = An HPMS section 35 AUTO-RT-SIGN: Auto Route Signing autóút jelölések 0 = Roadway is not signed as a numbered auto route 1 = Roadway is signed as an Interstate route 36 37 38 39 40 41 42 43 44 2 = Roadway is signed as a US Highway route 3 = Roadway is signed as a State Numbered route Note: System hierarchy in Item # 10 (AUTO-RT-NUMBER) is used. SPECIAL FUN: Special Systems speciális rendszerek 0 =
Not an addition to the Interstate system 1 = Addition to Interstate system (23 U.SC 139(c)) 2 = Addition to Interstate system (23 U.SC 139(a))-approved before March 9, 1984 3 = Addition to Interstate system (23 U.SC 139(a))-approved on or after March 9, 1984 Note: Used to identify Special Highway System Categories. MEDIAN TYPE: Median Type for DIVIDED Roadway Only középrész tipusa 0 = None 1 = Curbed 2 = Positive barrier 3 = Unprotected TYPE URB LOC: Urban Location városi jelleg 0 = Not applicable (i.e, not a principal arterial nor in an urbanized area) 1 = Central Business District (CBD) 2 = High density business/commercial center (excluding CBD) 3 = Low density commercial 4 = High density residential (5,000 or more persons per square mile) 5 = Low density residential (less tan 5,000 persons per square mile) 6 = Other urban area, including undeveloped land TOLL RD: Toll fizetés 1 = Not a toll road 2 = A toll road COUNTY-CODE: County Code megye kód A = Barnstable H = Hampshire B
= Berkshire I = Middlesex C = Bristol J = Nantucket D = Dukes K = Norfolk E = Essex L = Plymouth F = Franklin M = Suffolk G = Hampden N = Worcester SERIAL NUMBER: Serial Number Uniquely identifies each roadway segment within a given county CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the section length file (MRD.FEET), the town-level and statewide coverages (MRDxxxs), and the arc length file (MRD.LENGTH) CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the section length file (MRD.FEET), the town-level (MRDs), and the arc length file (MRD.LENGTH) CITY RIN H: City or Town Number + Road Inventory Number (zero filled) Uniquely identifies each road within the entire state Note: This item is the link to the street listing file (MRD.STREETS) Az MRD.FEET fájl információt tartalmaz a
nyilvántartási szekciók hosszáról, a köverkező mezőkkel : 1 ODOM-READ: Cumulative Odometer Reading odométer leolvasás Note: In hundredths of a mile (xx.xx); This value does not represent section length (see below) 2 OD-LENGTH: Section Length (in hundredths of a mile) Note: In hundredths of a mile (xx.xx) szekció hossza százmérföldben 3 FT: Section Length (in feet) szekció hossza lábban 4 CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level coverages (MRDs), and the arc length file (MRD.LENGTH) 5 CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level coverages (MRDs), and the arc length file (MRD.LENGTH) Az MRD.LENGTH fájl tartalmaz információt a nyilvántartási ívhossakról, a mezők
a következők: 1 FREQUENCY: Number of arcs assigned to the particular CSN Note: Only arcs with arc-id less than 60,000 are included 2 LENGTH: Total length of arcs in meters assigned to the particular CSN Note: Only arcs with arc-id less than 60,000 are included 3 CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level (MRDs), and the arc length file (MRD.LENGTH) 4 CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level (MRDxxxs), and the arc length file (MRD.LENGTH) Mobil térképező rendszerek (angol elnevezéssel Mobile Mapping Systems vagy rövidítve MMS) a 80-as évek végén, 90-es évek elején jelentek meg északamerikai kisérleti műhelyekben, ipari-kisérleti alkalmazásukról az első
közlemények 199596-ra datálhatók . A rendszer mozgó szállítóeszközre erősített különbözö érzékelőkből álló együttes, mely képes a jármű pályájának folyamatos meghatározására, s egyben a szenzorok fajtájától függő, kiegészítő térbeli információ gyűjtésére. Egy furgont tehát felszerelünk helymeghatározó műszerekkel és digitális kamarákkal és a furgon 60 km/óra sebességgel haladva képes nem csak a saját pályáját, de a környező utcaképet is geometriailag korrekten kiértékelhető módon rögzíteni. Szenzorként rendszerint CCD kamarákat alkalmaznak, de helyettük alkalmazhatnak: - képalkotó lézert; - profilozó lézert; - impulzus radart és - ultrahangos érzékelőt is. A képalkotó lézer alkalmazása esetén a kép mellett a szenzortól mért távolságot is meghatározzák, ami növeli a meghatározás redundanciáját és pontosságát. A lézer profilméréskor távolságot és szöget mérnek (pld. vasúti
ürszelvény meghatározásához) Az impulzus radarok képesek az objektumok vastagságának meghatározására is, rendszerint a burkolati hibák földerítésére használják. Az ultrahangos érzékelők szintén poláris koordinátákat (távolságokat és szögeket) határoznak meg, utak hossz,és keresztszelvény méréseinél kerülnek alkalmazásra. Az érzékelők sora persze még folytatható volna (pld. az igen gyakran alkalmazott videó-kamerákkal) felsorolásunkban azonban csak azok szerepelnek, melyekből számítható helyzeti pontosság többé-kevésbé összhangban van a furgon pályájának meghatározási pontosságával. A kocsi folyamatos helymeghatározására vevőt és kiegészítő navigációs eszközökként vagy inerciális navigációs rendszert (angolul Inertial Navigation System - rövidítve INS) vagy kerékfordulatmérőket és pörgettyüs tájolókat használnak. Az INS-t használó mérőkocsik adatait is kiegészíthetik pld az ABS
blokkolásgátló rendszerek fordulatmérőivel. A felmérés eredményét egyelőre utófeldolgozási üzemmódban kapják meg, a jelenlegi kutatások jelenidejű adatszolgáltatást és az ehhez szükséges automatikus objektum kiértékelést célozzák meg. Felmerülhet a kérdés, hogy a nagyfelbontású terképészeti műholdak megjelenése után lesz-e szükség ilyen rendszerekre. Nyugodtan válaszolhatjuk, hogy igen, elsősorban köz-, és vasutak pályái és szerelvényei, valamint városi utcák és utcaképek felmérésekor. Ezeknél az objektumoknál ugyanis a felmérendő objektumok jelentős része a függőleges síkban helyezkedik el, s ezért a közel függőleges tengelyű légi és müholdas felvételeken nem látható. Inerciális navigációs rendszerek A 80-as évek elején az amerikai hadsereg számára gyártott inerciális navigációs rendszerek néhány tipusát felszabadították a polgári használat céljaira és a geodéták hozzáláttak annak a
vizsgálatához, hogy milyen feltételek mellett használhatók e rendszerek az alappontsűrítés automatizálására. Bár az alkalmazásra gyakorlati feladatokban már csak azért sem került sor, mivel a műszerek akkor még igen drágák voltak (kb. 500 000 $), az elmélet kidolgozása igen hasznosnak bizonyult napjaink korszerűbb (kisebb, pontosabb, olcsóbb) rendszerei alkalmazhatósága szempontjából. Az INR alpelvét legegyszerűbben úgy képzelhetjük el hogy létrehozunk egy háromdimenziós koordináta rendszert, mely a Földhöz képesti kezdeti helyzetét a jármű haladása közben nem változtatja meg, s az egyes tengelyekre szerelt gyorsulásmérők mérési eredményeit kétszeresen integrálva megkapjuk a jármű kezdeti helyzetéhez képest a megtett út koordináta vetületeit. A rendszer gyakorlati megvalósításához tehát biztosítani kell a koordináta tengelyek mozdulatlanságát ezt a feladatot giroszkópok végzik, a tengelyekre mechanikusan
gyorsulásmérőket kell szerelni, végül számítóegységet kell a rendszerhez kapcsolni a jelek gyűjtésére és kétszeres integrálására. A 60-as, 70-es években kialakított rendszerekben a tengelyek stabilizálására pörgettyűket használtak. A pörgettyű tengelye giroszkopikus merevséggel rendelkezik azaz az inerciális koordináta rendszerhez képest helyzetét nem változtatja. Az ábrán egyszerűsítve bemutattuk a korai rendszerekben alkalmazott himbás megoldások alapelvét. Az m motor gyors forgása következtében a t tengely párhuzamos az X koordináta tengely kezdeti helyzetével (az ábrán látható koordináta rendszert az a járműtesthez rögzítettük). Ha a gépkocsi elfordul a Z tengely körül úgy a b keret az ábrán látható csapágyakban szintén elfordul a- hoz képest és a t tengely helyzete nem változik. (A feltüntetett elrendezés kompenzálja a jármű Y tengely szerinti elfordulását is, az X menti elfordulás kompenzálására
azonban egy újabb himbával kellett volna még kiegészíteni az ábrát). Ahhoz, hogy a vázolt elrendezés céljainknak megfelelően működjön, azaz hogy a gyorsulást a kiindulástől a végpontig azonos tengely irányába mérje arra van szükség, hogy a b keretre mereven egy szerelőlapot erősítsünk, melyre szintén mereven felszereljük a gyorsulás mérőt. Mivel a navigáció hajók és repülők esetén igényli a jármű elfordulési szögeinek ismeretét is, az a testelfordulását a b kerethez képest szögadókkal mérték. A bemutatott leegyszerűsített vázlatból is látható, hogy a stabilizált tengelyekkel működő berendezések igen szabatos mechanikai kialakítást igényeltek (pld. súrlódásmentes csapágyak, szögadók, stb) és a finommechinika viszonylag lassabb fejlődése nem tette lehetővé, hogy a fenti megoldással pontos, olcsó és kisméretű rendszerek épülhessenek. Az ujabb lehetőségeket a gyorsabban fejlődő optika és
mikroelektronika szolgáltatták Az új tipusú analitikus rendszerek létrejöttét a strapdown (leszíjazott = rögzített) giroszkópok felfedezése tette lehetővé. A rögzített giroszkópnak nincs stabilizált tengelye, melyhez gyorsulásmérőt rögzíthetünk, ez a giroszkóp tulajdonképpen nagypontosságú szögsebességmérő, mely sebességértékek idő szerinti integrálásából meghatározható a kezdeti állapothoz viszonyított, a giroszkóp tengelye körül végzett elfordulás. Leggyakrabban lézer giroszkópokat alkalmaznak szögmérő egységként, de újabban szilárdtest megoldásokkal is találkozunk. A következő slájdon felvázoltunk egy lézer giroszkópot, míg a következő másodikon egy szilárdtest giroszkópot az u.n Murata féle girócsillagot A lézegiroszkóp alapelve azon az 1881-ben felfedezett törvényen alpul, hogy a mozgó testből kibocsájtott fény sebessége konstans marad az inerciális vonatkozási rendszerhez képest. Ha tehát
az ábrán látható optikai gyűrű nem forog, úgy a fénynek T=L/c időre van szüksége az L optikai hosszúságú gyűrű körbejárására, ahol c a fény terjedési sebessége. Ha azonban a gyűrű az óramutató járásának megfelelő irányban forog, úgy annak a fénysugárnak, mely szintén ebben az irányban járja körbe a gyűrüt Dt 1 idővel többre van szüksége a körbejáráshoz, míg annak a fénnyalábnak, mely az óramutató járásával ellentétesen halad a kör megtétele Dt 2 idővel kevesebbe kerül. Felírható, hogy a két nyaláb útkülönbsége: ahol A a fénysugarak által körbezárt terület, w I az inerciális referencia rendszerre vonatkozó szögsebesség. A klasszikus elv egyik viszonylag korszerű megvalósítási formája esetében a HE-NE lézert közvetlenül a fényútba szerelik, melyet három tükör T1,T2,T3 határol. A girószkóp testét olyan anyagból készítik, melynek gyakorlatilag nincs hőtágulása, az optikai út pontos
beszabályozását szolgáló elemekkel a fényút hosszát a hullámhossz n szeresére állítják, ahol n egész szám. Mivel ez a rendszer üregrezonátorként működik a végső leolvasás a formában jelenik meg, melyet az interferenciasávok vándorlásának számlálásából vezet le a detektor. A Murata féle girocsillag nyugalmi állapotában az alaplapot gerjesztő rezgések egyenesen terjednek a szimetrikus érzékelő lapok felé és így azok azonos feszültséget jeleznek. Ha a háromszöget elforgatjuk, úgy a hullámterjedés inerciális jellege következtében, a B lapra érkezik azoknak a rezgéseknek egy része is, melyek a C balfeléről indultak még abban a helyzetben, amikor a C vízszíntesen állt. A két érzékelőről levett feszültségek különbségéből a szögsebesség értéke számítható. Mí hullámterjedés in inerciális je jellegét ha használták ki ki a fi fizikusok, addig a gy gyorsulás mérők a Míg a gi giroszkópokban a hu tömeg
tehetetlenségén (Newton 2. törvényén) alapulnak. A legtöbb korszerű gyorsulásmérő az inga elvet kombinálja valamely piezoelektromos jellemzővel. járműbe Litton LN-100 gyorsulásmérő LN-100-as komplett inerciális rendszer az az amerikai légierő az F22-es repülőgépekbe es a Commanche helikopterekbe építi be. Mivel az analitikus inerciális navigációs rendszerekben nincsennek valódi inerciális tengelyek a mérési eredményeket számítással kell transzformálni a jármű ugy nevezett test koordináta rendszerébe, illetve a földrajzi helyi függőleges (n) koordinátarendszerbe, melyben a pont helyzetét a szélességgel j , hosszúsággal l és ellipszoid fele eletti magassággal h határozzuk meg. Szükség van még a jármű elfordulási értékeire: a q bukásra, z dőlésre és a elfordulásra illetve navigációs célokat sz szolgáló re rendszerekben a pi pillanatnyi ve vezérlési ad adatokra is is. első lépésében kalibrációs javításokkal
látják el a gyorsulásmérők és a giroszkópok outputját. második lépésben a test koordináta rendszerből (b) a navigációs számítására kerül koordináta rendszerbe (n) transzformáló mátrix sor. Ez a számítás a következő differenciál egyenlet numerikus megoldásán alapul: ahol az vektorból kialakított antimetrikus forma. Ugyanis, ha úgy (az egyenlet baloldalán a mátrix feletti pont a differenciálás jele). Az meghatározásához a navigációs rendszernek az inerciális rendszerre vonatkozó szögsebesség vektorát -t ki kell vonnunk vissszacsatolás formájában a mért inerciális szögsebesség vektorból -ből, azaz . A következő számítási lépésben a test koordinátában mért erőket (egységnyi tömegen mért gyorsulásokat) alakítja át a rendszer a navigációs koordináta rendszerbe: majd az átalakított értékeket betáplálja a navigációs kompjuterbe. A nehézségi erőtér és a Föld forgásából eredő Coriolis erő
hatásainak kompenzálása után két egymást követő integrálás eredményeképpen a rendszer kimenetén megkapjuk a v n sebességvektort és az r n helyzetvektort. A v n vagy a szélesség és hosszúság szerinti sebességkomponensek valamint a Föld forgássebessége alapján meghatározható, s ennek segítségével a már fentebb említett visszacsatoláshoz szükséges számítható. Mivel a mobil térképező rendszerekben az elfordulásoknak döntő szerepe van lássunk néhány további összefüggést a mért értékek és navigációs rendszerbe transzformáltjaik között. Induljunk ki a test koordinátata rendszer és az inerciális koordináta rendszer közti transzformációból: , ahol az i tengely körül j szöggel történő Az eddig még nem tárgyalt jelölések a következők: forgatás forgatási mátrixának transzponáltja, l 0 a t 0 időhöz tartozó földrajzi hosszúság, w ie a Föld forgási sebessége. Érdemes megjegyezni, hogy a transzformációs
mátrixok ortogonalitása miatt igaz, hogy, azaz a kiinduló és cél koordináta rendszert a transzformációs mátrix sorainak és oszlopainak felcserélésével megfordíthatjuk. Ha Ha differenciáljuk a kiinduló transzformációt a következő kifejezésekre jutunk: . Végül felírhatjuk, hogy mivel is egyenlő a giroszkópok által szolgáltatott mérési eredmény: Az Az . a helyi függőleges rendszer szögsebesség vektora az inerciális rendszerre vonatkoztatva, melyet a következő képlettel irhatunk le: kifejezésében szereplő mátrixok szorzatának sz szögsebesség vektort a navigációs szögek szerinti forgatási differenciálásával nyerhetjük az alábbiak szerint: Talán a bemutatott képletek egy kissé meg könnyítik annak az elképzelését, hogy hogyan lehet a másodpercenként 50 sz szögsebe ebesség értékből meghatározni a jármű és a Földhöz kapcsolt referencia rendszer forgatási mátrixát -t. Az inerciális rendszerek általában
az általunk (n) -betűvel jelölt földrajzi koordináta rendszerben dolgoznak. Természetes, hogy szükség esetén ujabb transzformációval át tudunk térni ebből a rendszerből valamely rögzített helyzetű térbeli vagy síkbeli koordináta rendszerbe is. Ha ilyen rendszerbe transzformáltunk azt a továbbiakban (m) indexszel jelöljük. Néhány megvalósult Mobil Térképező Rendszer Ha Ha az irodalmat tanulmányozzuk (kongresszusi kiadványokat, szakfolyóiratokat, Internet home page-eket) öt-hat létező rendszerről találunk információt. Ezek a VISAT (Video-Inercial-SATellite) rendszer , a GPSVanTM, a GPSVision, Road DAVe, a magyar Datakart Geodézia Kft. Satnav Van rendszere egy holland és egy német rendszer. Mivel viszonylag rréészletes leírással csak az első háromról re rendelkezem, ezeket fogom bemutatni. Irodalmi adatok alapján a legkomplettebbnek a kanadai Calgary Egyetem Geomatika tanszéke és a Quebec tartomány Laval városában működő GEOFIT
vállalat közös fejlesztése a VISAT tűnik. A következő szlájd négy ábráján először vázlatosan bemutatjuk a rendszert, majd a gépkocsit látjuk, ezután pedig a jobb és baloldali mérőtornyokat mutatjuk be. Amint az ábrákról látszik a GPS, INR és a CCD kamarák a furgon tetején helyezkednek el. A baloldali ábra második része bemutatja, a kamarák által felvett képpárt, míg a harmadik rész arra utal, hogy a képek feldolgozásával milyen objektumokkal gazdagodik a GIS. A jobboldali képen jól láthatók a gépkocsi és a rászerelt az érzékelő együttes. A VISAT rendszer egyik érdekessége, hogy a furgon tetejére rögzített érzékelő blokkokban 8 CCD kamara foglal helyet. Ez lehetővé teszi, hogy az objektumot mindig azokból a képekből értékeljék ki, melyek tartalmi illetve pontossági szempontból a legtöbbet nyújtanak. A CCD kamarák vezérlését külön egység hajtja végre. E kamarákon kívül egy videókamara is része a
rendszernek (a szerepéről nem sok szó esik a leírásokban), két L1/L2 GPS vevő, és egy INR gondoskodik a helyzetmeghatározásról, az ABS rendszer fordulatszámláló kimenetét az expozíciós időpontok kijelőlésére használják (meghatározott távolságokra és nem eltelt időre exponálnak). Az összes érzékelő egy pentium PC-hez van interfészelve, mely programozott megszakításokkal vezérli a különböző adatáramlatokat. A mérési eredmények feldolgozására szolgáló munkaállomásra telepített szoftver együttest GEOSTATIONnak nevezték. A szoftver a kiválasztott és kiértékelt objektumokat GIS struktúrában tárolja. Az 1997 végén kibocsájtott VISAT nevű feldolgozó programjuk már PC-n fut WINDOWS 95 alatt. Az inerciális navigációs rendszereknél tárgyaltakhoz képest két változást figyelhetünk meg. Megjelent a c-vel jelölt kamara koordináta rendszer, melynek kezdőpontja valamelyik kamara objektívjének vetítési középpontja,
másfelől az eddig n-nel jelölt földi koordináta rendszert az ábrán m-mel jelöltük arra utalva hogy a térképezést tetszőleges rendszerben végrehajthatjuk. Feladatunk az i indexű pont helyzetvektorának (derékszögű koordinátáinak) meghatározása a térképezés m , koordináta rendszerében: ahol rm i a meghatározandó pont keresett koordináta hármasa az m rendszerben, r INS m (t) az inerciális rendszer kezdőpontjának koordinátái az m rendszerben (tulajdonképpen ezeket az értékeket határozzuk meg az inerciális rendszer és a GPS integrálásából), (t) a fényképezés időpillanata, Rm b (t) a b kordináta rendszerből az m-be forgató forgatási mátrix (az előző pontban amikor a térképezés koordinátarendszere az n volt ezt a mátrixot Cn b nek neveztük), Rb c a kamara koordináta rendszer és a test koordináta rendszer közötti differenciális forgatási mátrix (a két koordináta rendszer tengelyeit igyekeznek párhuzamosan elhelyezni) -
elemeit a kalibráció során határozzák meg a mérés előtt, rc az objektum koordinátái a képkoordináta rendszerben, ab a c rendszer kezdőpontjának koordinátái a b rendszerben (szintén a kalibrálás során mérik), Si méretarány tényező, mely az egy pont - egy kamara viszonyra jellemző. A vektor egyenlet négy ismeretlent tartalmaz: rm i három koordinátáját és az Si méretarány tényezőt három egyenletben, a vektor egyenlet ugyanis három skaláris egyenletre bontható. Ha ugyanaz a pont N képen képződik le úgy a meghatározás szabadságfoka (3N-3-N). Ha tehát a kérdéses pont csak két képen van rajta úgy a meghatározás szabadságfoka 1. A rendszer 30 cm-es meghatározási pontosságot célzott meg, ehhez a GPS/INR helymeghatározást 10-15 cm-es pontossággal kell végezni, az INR szögértékei 1-5 pontosak, a kalibrálás során mért távolságok 2-5 mm hibával terheltek, a kalibrált szögértékek pedig 1-5 pontosak. A fotogrammetriai
kiértékelés pontossága 0.5 pixel A kisérleti mérések során 30 m-es maximális kamara - objektum távolság esetén a középhiba nem haladta meg vizszíntes értelemben a 16 cm-t, magassági értelemben pedig a 7 cm-t. A GPSvanTM rendszert az Ohio Állami Egyetem Térképészeti Központjában fejlesztették ki az elmúlt 5 évben. Amint az alsó ábrából látható a rendszer nem alkalmaz inerciális navigációs rendszert a GPS-szel nem mérhető helyek (alagutak, erdők, magas beépítésű városok, stb.) pozicionálására, e helyett a kerékfordulatszámok méréséből interpolálja két GPS mérési pont közé a helyzeti koordinátákat. A gépkocsi két db. 18 m-es bázison rögzített CCD kamarával van ellátva. Az ipari-kísérleti feladatokhoz 768x480 pixeles kamarákat használtak. Mivel ez a kamara viszonylag durva felbontásával már 10 m tárgytávolság esetén eleve 5-15 cm hibával terheli a mérést, kisérleteket végeztek 1000x1000 pixeles kamarákkal
is, melyekkel elérhető, hogy a felbontásból eredő hiba 5 m tárgytávolság esetén kevesebb mint 3 cm, 25 m tárgytávolság esetén pedig kevesebb mint 15 cm legyen. Mégis, az ipari mérések vizsgálata (több mint 9000 km vasúti váltó és egyéb vasúti jelölés felmérése) azt bizonyította, hogy az átlagosan 50 cm hiba főrészét kb. 30 cm-t a DR rendszer okozza A Lambda Tech. International GPSVision nevű rendszerének leírásából két olyan kérdésre is választ kapunk, melyekről az előző ismertetések hallgattak: milyen tipusú GPS észlelést alkalmaznak és milyen formában használják a Kalman szűrőt. Előbb azonban ismerjük meg a rendszer általános jellemzőit. Az első generációs GPSVision egység egy Trimble ProXL kód-fázis GPS vevőből, egy Liton LN-200 inerciális navigációs rendszerből, és két nagyfelbontású szines CCD kamarából áll. Lehetőség van más GPS alkalmazására is pld a Trimble SSI GPS vevőt használják ha a
pontmeghatározás pontossági igénye 10-20 cm. Másik érdekes tulajdonsága a rendszernek, hogy az érzékelők dobozba vannak szerelve és tetszés szerinti gépkocsira felerősíthetők. A rendszer a GPS távolságok kettős különbsége alapján működik. Ha i és j jelöl két műholdat, b az ismert bázis ponton álló GPS vevő helyét, r pedig a mozgó vevő helyét, tehát a mérőkocsit, akkor a mért távolságok különbségére felírható, hogy egyenlő a koordinátákból számolható távolságok különbségével. Jelöljük R-el az úgynevezett pseudo távolságokat, -val a koordinátákból számítható távolságokat (pld. ) akkor . Mivel a műholdak koordinátáit ismerjük, a bázis állomás koordinátáit szintúgy, a R értékeket megmértük, a kifejezésben csak az r három koordinátája az ismeretlen. A megoldáshoz tehát három kettős távolságkülönbségre van szükség, amihez legalább négy olyan szatellita szükséges, mely mind a mozgó,
mind a bázis állomásról észlelhető. A Kalman szűrő olyan matematikai eljárás, mely a dinamikus modell felhasználásával megbecsüli valamely k+1 időpontban a rendszer állapotát, és egybeveti ezt az értéket valmely pontos értékkel a kérdéses időpontban. A rendszer statisztikai tulajdonságai valamint a becsült és mért értékek eltérése alapján a módszer megjavítja a vizsgált szakaszra (a két mérés közé) eső előzetes értékeket és a folyamat folytatódik. A GPSVision decentralizált szűrő módszert alkalmaz, melynek az a lényege, hogy nem számolja ki a Kalman féle becsült értékeket hanem e helyett az inerciális rendszer outputját használja. A simítás javítása érdekében a szűrőeljárást mindkét irányba lefuttatják. A külső adtokkal ellátott képek kiértékelésére WINDOWS NT/95 alatt futó felhasználóbarát programrendszert is kidolgoztak. A rendszer lehetővé teszi a képek szemlélését, képpárok
összeválogatását és a felhasználó által kijelölt objektum szemiautomatikus kiértékelését. Gyalogosan használható INS+GPS pozicionáló rendszer 14 kg. 4 órára elég elemmel Az Inerciális Navigációs egység: 3 lézer gyűrű giro és 3 gyorsulásmérő, LEICA MX 9400 12 csatornás GPS, DAP PC9800 kézi vezérlő és adatgyűjtésre. navigációra Koordináta kiegyenlítés a helyzet megadások között. Mérés előtt az INS-t ismert alapponton 20 percig kell inicializálni (beállítani az Északi irányra). Fedett terepen automatikusan inerciális mérésre kapcsol. Ilyenkor legalább 2 óránként fix pont vagy DGPS. Ezen kívül az inerciális üzemmódban rendszeres megállás is kell. Kitűzéshez célszerű az INS és GPS szimultán alkalmazása
útvonal szakaszait leíró táblája összekapcsolása -1995. 1997-ben megindult a DTA-50 és az OKA kapcsolatának aktív létrehozása, az eredeti OKASZAK állomány erősen szűkített tartalmával tartalmával:: Az útvonal megnevezése, a csomóponti azonosítók és a szelvényezés méteres felbontásban, az útpálya kódok, az útvonal típusára vonatkozó kódok, a mérőkocsi által felvett szakaszhossz adatok, és az érintett települése k települések korrekt hátteret biztosítanak, a műszaki információk további kapcsolatához. Jelenleg évente háromszor történik a változások átvezetése. A projekt soron következő feladatai: Az alap térképmű adatkonverziója MicroStation DGN - MapInfo MIF. A térképi felületek kialakítása (település foltok, tavak, folyók, stb.) Az országos útadatok ( OKA ) és a térkép egyértelmű, redundancia mentes kapcsolatának kialakítása. A grafikus adatmodell és az
alfanumerikus adatbázis kapcsolatának biztonságos üzemi feltételeinek kialakítása. Az alfanumerikus adatbázis frissítés és a térképi változások összhangjának biztosítása. Az AKMI (Állami Közúti Műszaki és Információs Közhasznú Társaság feladata az országos közutak minőség biztosítási munkáinak irányítása, az országos közúti adatbank és az ÚTINFORM működtetése) által begyűjtött önkormányzati úthálózat adatainak beillesztése a fent vázolt kapcsolati rendszerbe. A fővárosi adathalmaznak megfelelően utcanevek (és címek) feltöltése az országos hálózat átkelési szakaszaira. A platform független matematikai adathalmaz előállítása a végterméket működtető ORACLE szoftver számára. USA példa a Masachusetts állami GIS az interneten is elemezhető de ami fontosabb, az állományok letölthetőek. A Masachusetts-i útréteg a USGS 1:100,000 DLG-k kiegészítve az útügyi igazgatóság (MHD)
vonalaival. Sok utat az MHD a városoktól kapott városi méretarányban. Minden objektumhoz hozzákapcsolták az MHD igen gazdag attribútum adatbázisát. A réteget a közeljövőben kicserélik az ortofotó program keretében meghatározott 1:5,000-es út tengelyvonalakkal, s ekkor az MHD nyilvántartás és utca attribútum adatok nagyobb méretarányú geometriai alaphoz fog csatlakozni. Az .AAT fájl a következő attribútumokat tartalmazza: megye kód) COUNTY-CODE: County Code (m A = Barnstable H = Hampshire B = Berkshire I = Middlesex C = Bristol J = Nantucket D = Dukes K = Norfolk E = Essex L = Plymouth F = Franklin M = Suffolk G = Hampden N = Worcester SERIAL NUMBER: útszegmens megyén belüli azonosítására CLASS: funkcionális és elérhetőségi osztályozás rajzolási célból. Classes are: 1 - Limited Access Highway 2 - Multi-lane Highway, not limited access 3 - Other numbered route 4 - Major road - connector 5 - Minor street or road 6 - Minor street or road 7 -
Track (from USGS DLGs) 8 - Trail (from USGS DLGs) ADMIN TYPE: Based on AUTO-RT-SIGN from MRD.INV file Types are: 1 - Interstate 2 - U.S Federal 3 - State 0 - Local road RT-NUMBER: Route number of the road type listed in ADMIN TYPE STREET NAME: Street name from the MRD.STREETS file LANES: Number of lanes on other side of divided highway; values greater than 1 indicate the road is divided; used in the coding of the CLASS item sávok, az osztály kódolásához * REDEFINED ITEMS átdefineált jellemzők CSN: County Code + Serial Number Used to uniquely identify any roadway segment within the entire state. Note: This item is the link to the road inventory file (mrd.inv) RT-POS1 The following seven items separate the characters in the RT-NUMBER item for plotting purposes. RT-POS2 RT-POS3 RT-POS4 RT-NUMBER3 RT-NUMBER2 RT-NUMBER1 The items for descriptions of street listings in the related file MHDRD.STREETS are: utcák leírása MHDRD.STREETS fájlban a következő mezőkkel CITY NUM: City
or Town Number Abington = 1 . Yarmouth = 351 RIN: Road Inventory Number. Used to uniquely identify any road within a given town STREET NAME: Street Name with Suffix FRM-ST-NUM: From RIN FRM-ST-NAME: From RIN name. Refers to either a road, a town or state line, a dead end, private property, or a cul-de-sac. TO-ST-NUM: To RIN TO-ST-NAME: To (RIN). See Item FRM-ST-NUM for description CITY RIN H: City or Town Number + Road Inventory Number (RIN). Used to uniquely identify any road within the entire state. Note: This item is the link to the road inventory file (mhdrdinv) OUTPUT: All fields The MHDRD.INV file stores information on the road inventory The items are: az útnyilvántartási fájl mezői 1 CITY NUM: City or Town Number Abington = 1 . Yarmouth = 351 város szám 2 RIN: Road Inventory Number. Uniquely identifies each road within a given town útnyilvántartási szám 3 FRM-ST-NUM: From Road Inventory Number (RIN) úttól szám xxxx = RIN Xxxx = Bordering town line, where X=1st
letter of bordering town name and xxx=CITY NUM 0000 = Dead end 00CT = CT state line 00NH = NH state line 00NY = NY state line 00RI = RI state line 00VT = VT state line 8888 = Private property 9999 = Cul-de-sac Note: From and To Road Inventory Number are for the entire road (RIN), not for the road segment (SERIAL NUMBER). 4 TO-ST-NUM: To Road Inventory Number (RIN) úthoz szám See Item # 3 (FRM-ST-NUM) for description 5 ADMIN SYS: Administrative System kezelő hivatal 1 = Massachusetts Highway Department 2 = City or town accepted road 3 = Metropolitan District Commission 4 = Massachusetts Turnpike Authority 5 = Massachusetts Port Authority 6 = State Park or Forest 7 = State institutional 8 = Federal Park or Forest 9 = County Institutional 0 = Unaccepted by city or town B = State college or university C = US Department of Defense D = US Army Corps of Engineers E = Federal Institutional F = Other Federal G = Federal Bureau of Indian Affairs H = Miscellaneous Bridges 6 FEDAID SYS:
National Highway System (NHS) Status 0 = Not on NHS 1 = NHS - Interstate 2 = NHS - Strategic Defense Highway System (STRAHNET) 3 = NHS - STRAHNET Connector 4 = NHS - Other 5 = NHS - Other - One-way pair 6 = NHS - Other truck route exclusion 7 = NHS connection to major intermodal terminal (proposed) 7 FEDAID-RT-NUM: Federal-Aid Route Number 8 FEDAID-UR-DESIG: Federal-Aid Urban/Rural Designation 1 = Urban city 2 = Urban town 5 = Rural town Note: A town may be partially urban and partially rural. 9 FUNC-CLASS: Functional Classification funkcionális osztályozás 0 = Local 1 = Interstate 2 = Rural principal arterial and Urban extensions 3 = Rural minor arterial and Urban extensions 4 = Other Urban principal arterial 5 = Urban minor arterial or Rural major collector 6 = Urban collector or Rural minor collector Note: Use urban/rural designation to interpret functional classification. 10 AUTO-RT-NUMBER: Auto Route Number autóút száma Interstate, US Highway, or State Numbered Highway
route number Note: If multiple routes exist on a section, the lowest number on the highest system is recorded (InterstateUSState); Other routes under hierarchy are listed in Item # 11 (ALT-RT-NUMBER). 11 ALT-RT-NUMBER: Alternate Route Number(s) All other routes under hierarchy of Item # 10 Note: Field begins and ends with a “+”, and routes are separated by “+”s. 12 D-SH-WID: Left Side Right Shoulder Width for DIVIDED Roadway Only bal nyom jobboldali padka szélessége Note: Width in feet. 13 D-SH-TYP: Left Side Right Shoulder Type for DIVIDED Roadway Only bal nyom jobboldali padka tipusa S = Stable - Unruttable compacted subgrade U = Unstable shoulder H = Hardened bituminous mix or penetration Note: Null = no left side right shoulder OR not a divided roadway OR no data. 14 DIV-L-SU-WID: Left Side Surface Width of Travel Lanes for DIVIDED Roadway Only bal nyom felület szélessége 0 = Not a divided roadway OR no data. Note: Width of traveled way in feet, excluding
shoulders/auxiliary lanes. 15 MED-WID: Median Width for DIVIDED Roadway Only 0 = Not a divided roadway OR No data közép szélesség Note: Width in feet; coded as 99, if over 100 feet. 16 DIV-L-NUM-TR-LA: Left Side Number of Travel Lanes for DIVIDED Roadway Only bal oldal nyomszáma 0 = Not a divided roadway OR No data 17 CURBS: Curbs szegélykövek 0 = None 1 = Left side only 2 = Right side only 3 = Both sides 4 = Along median only 5 = All curbs (divided highway) Note: For urban sections only. 18 L-SW-WID: Left Sidewalk Width bal járda szélesség 0 = No left sidewalk OR No data Note: For urban sections only; Width in feet. 19 R-SW-WID: Right Sidewalk Width jobb járda szélesség 0 = No right sidewalk OR No data Note: For urban sections only; Width in feet. 20 STREET-OPERATION: Street Operation út működés 0 = No data 1 = One-way traffic 2 = Two-way traffic 21 L-SH-WID: Median Shoulders Width for DIVIDED Roadway OR Left Shoulder Width for UNDIVIDED Roadway Note: Width in feet;
for DIVIDED roadways, median shoulders are assumed to have the same width. padka szélességek 22 L-SH-TYPE: Median Shoulders Type for DIVIDED Roadway OR Left Shoulder Type for UNDIVIDED Roadway See item # 14 (D-SH-TYP) for description Note: For DIVIDED roadways, median shoulders are assumed to have the same type. padka tipusok 23 SUR-WID: Right Side Surface Width for DIVIDED Roadway OR Surface Width for Entire UNDIVIDED Roadway 0 = No data Note: Coded as 99, if over 100 feet; Measurement of travelled way, excluding shoulders/auxiliary lanes. útpálya szélesség 24 SUR-TYP: Surface Type of Either DIVIDED or UNDIVIDED Roadway pálya felület tipusai 0 = No data 1 = Unimproved, graded earth, or soil surface road 2 = Gravel or stone road 3 = Brick road 4 = Block road 5 = Surface-treated road 6 = Bituminous concrete road 7 = Portland cement concrete road 8 = Composite road; flexible over rigid 9 = Composite road; rigid over flexible or rigid over rigid (‘white topping’) Note: For
both DIVIDED and UNDIVIDED roadways 25 R-SH-WID: Right Side Right Shoulder Width for DIVIDED Roadway OR Right Shoulder Width for UNDIVIDED Roadway Note: Width in feet. 26 R-SH-TYP: Right Side Right Shoulder Type for DIVIDED Roadway OR Right Shoulder Type for UNDIVIDED Roadway See Item # 14 (D-SH-TYP) for description 27 UNDIV-RRWY-#TRLA: Right Side Number of Travel Lanes for DIVIDED Roadway OR Total Number of Travel Lanes for UNDIVIDED Roadway 0 = No data 28 ACC CON: Access Control elérés irányítás 0 = No control 1 = Full control 2 = Partial control 29 TERRAIN: Terrain terep 0 = No data 1 = Level 2 = Rolling 3 = Mountainous 30 ROW-WID: Right of Way Width út jog szélesség 0 = No data Note: Width in feet. 31 SPEED LIMIT: Speed Limit sebesség korlátozás 0 = No data Note: Speed limit in miles per hour. 32 ODOM-READ: Cumulative Odometer Reading Note: In hundredths of a mile (xx.xx); This value does not represent section length. 33 URB-AREA: Urbanized Area urbanizált terület
URBANIZED AREAS A = Boston H = Pittsfield B = Brockton I = Providence-Pawtucket C = Fall River J = Springfield D = Fitchburg-Leominster K = Worcester E = Lawrence-Haverhill L = Taunton F = Lowell M = Hyannis G = New Bedford SMALL URBAN AREAS 1 = Athol R = Plymouth 5 = Spencer S = Greenfield 6 = Ware U = Southbridge O = North Adams V = Clinton-Lancaster Q = Gardner-Templeton Note: If NULL, roadway section is in RURAL area. 34 HPMS-CODE: HPMS Code 0 = Not an HPMS section nor on a road that has an HPMS section 1 = Not an HPMS section but is on a road that has an HPMS section 2 = An HPMS section 35 AUTO-RT-SIGN: Auto Route Signing autóút jelölések 0 = Roadway is not signed as a numbered auto route 1 = Roadway is signed as an Interstate route 36 37 38 39 40 41 42 43 44 2 = Roadway is signed as a US Highway route 3 = Roadway is signed as a State Numbered route Note: System hierarchy in Item # 10 (AUTO-RT-NUMBER) is used. SPECIAL FUN: Special Systems speciális rendszerek 0 =
Not an addition to the Interstate system 1 = Addition to Interstate system (23 U.SC 139(c)) 2 = Addition to Interstate system (23 U.SC 139(a))-approved before March 9, 1984 3 = Addition to Interstate system (23 U.SC 139(a))-approved on or after March 9, 1984 Note: Used to identify Special Highway System Categories. MEDIAN TYPE: Median Type for DIVIDED Roadway Only középrész tipusa 0 = None 1 = Curbed 2 = Positive barrier 3 = Unprotected TYPE URB LOC: Urban Location városi jelleg 0 = Not applicable (i.e, not a principal arterial nor in an urbanized area) 1 = Central Business District (CBD) 2 = High density business/commercial center (excluding CBD) 3 = Low density commercial 4 = High density residential (5,000 or more persons per square mile) 5 = Low density residential (less tan 5,000 persons per square mile) 6 = Other urban area, including undeveloped land TOLL RD: Toll fizetés 1 = Not a toll road 2 = A toll road COUNTY-CODE: County Code megye kód A = Barnstable H = Hampshire B
= Berkshire I = Middlesex C = Bristol J = Nantucket D = Dukes K = Norfolk E = Essex L = Plymouth F = Franklin M = Suffolk G = Hampden N = Worcester SERIAL NUMBER: Serial Number Uniquely identifies each roadway segment within a given county CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the section length file (MRD.FEET), the town-level and statewide coverages (MRDxxxs), and the arc length file (MRD.LENGTH) CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the section length file (MRD.FEET), the town-level (MRDs), and the arc length file (MRD.LENGTH) CITY RIN H: City or Town Number + Road Inventory Number (zero filled) Uniquely identifies each road within the entire state Note: This item is the link to the street listing file (MRD.STREETS) Az MRD.FEET fájl információt tartalmaz a
nyilvántartási szekciók hosszáról, a köverkező mezőkkel : 1 ODOM-READ: Cumulative Odometer Reading odométer leolvasás Note: In hundredths of a mile (xx.xx); This value does not represent section length (see below) 2 OD-LENGTH: Section Length (in hundredths of a mile) Note: In hundredths of a mile (xx.xx) szekció hossza százmérföldben 3 FT: Section Length (in feet) szekció hossza lábban 4 CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level coverages (MRDs), and the arc length file (MRD.LENGTH) 5 CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level coverages (MRDs), and the arc length file (MRD.LENGTH) Az MRD.LENGTH fájl tartalmaz információt a nyilvántartási ívhossakról, a mezők
a következők: 1 FREQUENCY: Number of arcs assigned to the particular CSN Note: Only arcs with arc-id less than 60,000 are included 2 LENGTH: Total length of arcs in meters assigned to the particular CSN Note: Only arcs with arc-id less than 60,000 are included 3 CSN ZF: County Code + Serial Number (zero filled) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level (MRDs), and the arc length file (MRD.LENGTH) 4 CSN H: County Code + Serial Number (with blanks) Uniquely identifies each roadway segment within the entire state Note: This item is the link to the road inventory file (MRD.INV), the town-level (MRDxxxs), and the arc length file (MRD.LENGTH) Mobil térképező rendszerek (angol elnevezéssel Mobile Mapping Systems vagy rövidítve MMS) a 80-as évek végén, 90-es évek elején jelentek meg északamerikai kisérleti műhelyekben, ipari-kisérleti alkalmazásukról az első
közlemények 199596-ra datálhatók . A rendszer mozgó szállítóeszközre erősített különbözö érzékelőkből álló együttes, mely képes a jármű pályájának folyamatos meghatározására, s egyben a szenzorok fajtájától függő, kiegészítő térbeli információ gyűjtésére. Egy furgont tehát felszerelünk helymeghatározó műszerekkel és digitális kamarákkal és a furgon 60 km/óra sebességgel haladva képes nem csak a saját pályáját, de a környező utcaképet is geometriailag korrekten kiértékelhető módon rögzíteni. Szenzorként rendszerint CCD kamarákat alkalmaznak, de helyettük alkalmazhatnak: - képalkotó lézert; - profilozó lézert; - impulzus radart és - ultrahangos érzékelőt is. A képalkotó lézer alkalmazása esetén a kép mellett a szenzortól mért távolságot is meghatározzák, ami növeli a meghatározás redundanciáját és pontosságát. A lézer profilméréskor távolságot és szöget mérnek (pld. vasúti
ürszelvény meghatározásához) Az impulzus radarok képesek az objektumok vastagságának meghatározására is, rendszerint a burkolati hibák földerítésére használják. Az ultrahangos érzékelők szintén poláris koordinátákat (távolságokat és szögeket) határoznak meg, utak hossz,és keresztszelvény méréseinél kerülnek alkalmazásra. Az érzékelők sora persze még folytatható volna (pld. az igen gyakran alkalmazott videó-kamerákkal) felsorolásunkban azonban csak azok szerepelnek, melyekből számítható helyzeti pontosság többé-kevésbé összhangban van a furgon pályájának meghatározási pontosságával. A kocsi folyamatos helymeghatározására vevőt és kiegészítő navigációs eszközökként vagy inerciális navigációs rendszert (angolul Inertial Navigation System - rövidítve INS) vagy kerékfordulatmérőket és pörgettyüs tájolókat használnak. Az INS-t használó mérőkocsik adatait is kiegészíthetik pld az ABS
blokkolásgátló rendszerek fordulatmérőivel. A felmérés eredményét egyelőre utófeldolgozási üzemmódban kapják meg, a jelenlegi kutatások jelenidejű adatszolgáltatást és az ehhez szükséges automatikus objektum kiértékelést célozzák meg. Felmerülhet a kérdés, hogy a nagyfelbontású terképészeti műholdak megjelenése után lesz-e szükség ilyen rendszerekre. Nyugodtan válaszolhatjuk, hogy igen, elsősorban köz-, és vasutak pályái és szerelvényei, valamint városi utcák és utcaképek felmérésekor. Ezeknél az objektumoknál ugyanis a felmérendő objektumok jelentős része a függőleges síkban helyezkedik el, s ezért a közel függőleges tengelyű légi és müholdas felvételeken nem látható. Inerciális navigációs rendszerek A 80-as évek elején az amerikai hadsereg számára gyártott inerciális navigációs rendszerek néhány tipusát felszabadították a polgári használat céljaira és a geodéták hozzáláttak annak a
vizsgálatához, hogy milyen feltételek mellett használhatók e rendszerek az alappontsűrítés automatizálására. Bár az alkalmazásra gyakorlati feladatokban már csak azért sem került sor, mivel a műszerek akkor még igen drágák voltak (kb. 500 000 $), az elmélet kidolgozása igen hasznosnak bizonyult napjaink korszerűbb (kisebb, pontosabb, olcsóbb) rendszerei alkalmazhatósága szempontjából. Az INR alpelvét legegyszerűbben úgy képzelhetjük el hogy létrehozunk egy háromdimenziós koordináta rendszert, mely a Földhöz képesti kezdeti helyzetét a jármű haladása közben nem változtatja meg, s az egyes tengelyekre szerelt gyorsulásmérők mérési eredményeit kétszeresen integrálva megkapjuk a jármű kezdeti helyzetéhez képest a megtett út koordináta vetületeit. A rendszer gyakorlati megvalósításához tehát biztosítani kell a koordináta tengelyek mozdulatlanságát ezt a feladatot giroszkópok végzik, a tengelyekre mechanikusan
gyorsulásmérőket kell szerelni, végül számítóegységet kell a rendszerhez kapcsolni a jelek gyűjtésére és kétszeres integrálására. A 60-as, 70-es években kialakított rendszerekben a tengelyek stabilizálására pörgettyűket használtak. A pörgettyű tengelye giroszkopikus merevséggel rendelkezik azaz az inerciális koordináta rendszerhez képest helyzetét nem változtatja. Az ábrán egyszerűsítve bemutattuk a korai rendszerekben alkalmazott himbás megoldások alapelvét. Az m motor gyors forgása következtében a t tengely párhuzamos az X koordináta tengely kezdeti helyzetével (az ábrán látható koordináta rendszert az a járműtesthez rögzítettük). Ha a gépkocsi elfordul a Z tengely körül úgy a b keret az ábrán látható csapágyakban szintén elfordul a- hoz képest és a t tengely helyzete nem változik. (A feltüntetett elrendezés kompenzálja a jármű Y tengely szerinti elfordulását is, az X menti elfordulás kompenzálására
azonban egy újabb himbával kellett volna még kiegészíteni az ábrát). Ahhoz, hogy a vázolt elrendezés céljainknak megfelelően működjön, azaz hogy a gyorsulást a kiindulástől a végpontig azonos tengely irányába mérje arra van szükség, hogy a b keretre mereven egy szerelőlapot erősítsünk, melyre szintén mereven felszereljük a gyorsulás mérőt. Mivel a navigáció hajók és repülők esetén igényli a jármű elfordulési szögeinek ismeretét is, az a testelfordulását a b kerethez képest szögadókkal mérték. A bemutatott leegyszerűsített vázlatból is látható, hogy a stabilizált tengelyekkel működő berendezések igen szabatos mechanikai kialakítást igényeltek (pld. súrlódásmentes csapágyak, szögadók, stb) és a finommechinika viszonylag lassabb fejlődése nem tette lehetővé, hogy a fenti megoldással pontos, olcsó és kisméretű rendszerek épülhessenek. Az ujabb lehetőségeket a gyorsabban fejlődő optika és
mikroelektronika szolgáltatták Az új tipusú analitikus rendszerek létrejöttét a strapdown (leszíjazott = rögzített) giroszkópok felfedezése tette lehetővé. A rögzített giroszkópnak nincs stabilizált tengelye, melyhez gyorsulásmérőt rögzíthetünk, ez a giroszkóp tulajdonképpen nagypontosságú szögsebességmérő, mely sebességértékek idő szerinti integrálásából meghatározható a kezdeti állapothoz viszonyított, a giroszkóp tengelye körül végzett elfordulás. Leggyakrabban lézer giroszkópokat alkalmaznak szögmérő egységként, de újabban szilárdtest megoldásokkal is találkozunk. A következő slájdon felvázoltunk egy lézer giroszkópot, míg a következő másodikon egy szilárdtest giroszkópot az u.n Murata féle girócsillagot A lézegiroszkóp alapelve azon az 1881-ben felfedezett törvényen alpul, hogy a mozgó testből kibocsájtott fény sebessége konstans marad az inerciális vonatkozási rendszerhez képest. Ha tehát
az ábrán látható optikai gyűrű nem forog, úgy a fénynek T=L/c időre van szüksége az L optikai hosszúságú gyűrű körbejárására, ahol c a fény terjedési sebessége. Ha azonban a gyűrű az óramutató járásának megfelelő irányban forog, úgy annak a fénysugárnak, mely szintén ebben az irányban járja körbe a gyűrüt Dt 1 idővel többre van szüksége a körbejáráshoz, míg annak a fénnyalábnak, mely az óramutató járásával ellentétesen halad a kör megtétele Dt 2 idővel kevesebbe kerül. Felírható, hogy a két nyaláb útkülönbsége: ahol A a fénysugarak által körbezárt terület, w I az inerciális referencia rendszerre vonatkozó szögsebesség. A klasszikus elv egyik viszonylag korszerű megvalósítási formája esetében a HE-NE lézert közvetlenül a fényútba szerelik, melyet három tükör T1,T2,T3 határol. A girószkóp testét olyan anyagból készítik, melynek gyakorlatilag nincs hőtágulása, az optikai út pontos
beszabályozását szolgáló elemekkel a fényút hosszát a hullámhossz n szeresére állítják, ahol n egész szám. Mivel ez a rendszer üregrezonátorként működik a végső leolvasás a formában jelenik meg, melyet az interferenciasávok vándorlásának számlálásából vezet le a detektor. A Murata féle girocsillag nyugalmi állapotában az alaplapot gerjesztő rezgések egyenesen terjednek a szimetrikus érzékelő lapok felé és így azok azonos feszültséget jeleznek. Ha a háromszöget elforgatjuk, úgy a hullámterjedés inerciális jellege következtében, a B lapra érkezik azoknak a rezgéseknek egy része is, melyek a C balfeléről indultak még abban a helyzetben, amikor a C vízszíntesen állt. A két érzékelőről levett feszültségek különbségéből a szögsebesség értéke számítható. Mí hullámterjedés in inerciális je jellegét ha használták ki ki a fi fizikusok, addig a gy gyorsulás mérők a Míg a gi giroszkópokban a hu tömeg
tehetetlenségén (Newton 2. törvényén) alapulnak. A legtöbb korszerű gyorsulásmérő az inga elvet kombinálja valamely piezoelektromos jellemzővel. járműbe Litton LN-100 gyorsulásmérő LN-100-as komplett inerciális rendszer az az amerikai légierő az F22-es repülőgépekbe es a Commanche helikopterekbe építi be. Mivel az analitikus inerciális navigációs rendszerekben nincsennek valódi inerciális tengelyek a mérési eredményeket számítással kell transzformálni a jármű ugy nevezett test koordináta rendszerébe, illetve a földrajzi helyi függőleges (n) koordinátarendszerbe, melyben a pont helyzetét a szélességgel j , hosszúsággal l és ellipszoid fele eletti magassággal h határozzuk meg. Szükség van még a jármű elfordulási értékeire: a q bukásra, z dőlésre és a elfordulásra illetve navigációs célokat sz szolgáló re rendszerekben a pi pillanatnyi ve vezérlési ad adatokra is is. első lépésében kalibrációs javításokkal
látják el a gyorsulásmérők és a giroszkópok outputját. második lépésben a test koordináta rendszerből (b) a navigációs számítására kerül koordináta rendszerbe (n) transzformáló mátrix sor. Ez a számítás a következő differenciál egyenlet numerikus megoldásán alapul: ahol az vektorból kialakított antimetrikus forma. Ugyanis, ha úgy (az egyenlet baloldalán a mátrix feletti pont a differenciálás jele). Az meghatározásához a navigációs rendszernek az inerciális rendszerre vonatkozó szögsebesség vektorát -t ki kell vonnunk vissszacsatolás formájában a mért inerciális szögsebesség vektorból -ből, azaz . A következő számítási lépésben a test koordinátában mért erőket (egységnyi tömegen mért gyorsulásokat) alakítja át a rendszer a navigációs koordináta rendszerbe: majd az átalakított értékeket betáplálja a navigációs kompjuterbe. A nehézségi erőtér és a Föld forgásából eredő Coriolis erő
hatásainak kompenzálása után két egymást követő integrálás eredményeképpen a rendszer kimenetén megkapjuk a v n sebességvektort és az r n helyzetvektort. A v n vagy a szélesség és hosszúság szerinti sebességkomponensek valamint a Föld forgássebessége alapján meghatározható, s ennek segítségével a már fentebb említett visszacsatoláshoz szükséges számítható. Mivel a mobil térképező rendszerekben az elfordulásoknak döntő szerepe van lássunk néhány további összefüggést a mért értékek és navigációs rendszerbe transzformáltjaik között. Induljunk ki a test koordinátata rendszer és az inerciális koordináta rendszer közti transzformációból: , ahol az i tengely körül j szöggel történő Az eddig még nem tárgyalt jelölések a következők: forgatás forgatási mátrixának transzponáltja, l 0 a t 0 időhöz tartozó földrajzi hosszúság, w ie a Föld forgási sebessége. Érdemes megjegyezni, hogy a transzformációs
mátrixok ortogonalitása miatt igaz, hogy, azaz a kiinduló és cél koordináta rendszert a transzformációs mátrix sorainak és oszlopainak felcserélésével megfordíthatjuk. Ha Ha differenciáljuk a kiinduló transzformációt a következő kifejezésekre jutunk: . Végül felírhatjuk, hogy mivel is egyenlő a giroszkópok által szolgáltatott mérési eredmény: Az Az . a helyi függőleges rendszer szögsebesség vektora az inerciális rendszerre vonatkoztatva, melyet a következő képlettel irhatunk le: kifejezésében szereplő mátrixok szorzatának sz szögsebesség vektort a navigációs szögek szerinti forgatási differenciálásával nyerhetjük az alábbiak szerint: Talán a bemutatott képletek egy kissé meg könnyítik annak az elképzelését, hogy hogyan lehet a másodpercenként 50 sz szögsebe ebesség értékből meghatározni a jármű és a Földhöz kapcsolt referencia rendszer forgatási mátrixát -t. Az inerciális rendszerek általában
az általunk (n) -betűvel jelölt földrajzi koordináta rendszerben dolgoznak. Természetes, hogy szükség esetén ujabb transzformációval át tudunk térni ebből a rendszerből valamely rögzített helyzetű térbeli vagy síkbeli koordináta rendszerbe is. Ha ilyen rendszerbe transzformáltunk azt a továbbiakban (m) indexszel jelöljük. Néhány megvalósult Mobil Térképező Rendszer Ha Ha az irodalmat tanulmányozzuk (kongresszusi kiadványokat, szakfolyóiratokat, Internet home page-eket) öt-hat létező rendszerről találunk információt. Ezek a VISAT (Video-Inercial-SATellite) rendszer , a GPSVanTM, a GPSVision, Road DAVe, a magyar Datakart Geodézia Kft. Satnav Van rendszere egy holland és egy német rendszer. Mivel viszonylag rréészletes leírással csak az első háromról re rendelkezem, ezeket fogom bemutatni. Irodalmi adatok alapján a legkomplettebbnek a kanadai Calgary Egyetem Geomatika tanszéke és a Quebec tartomány Laval városában működő GEOFIT
vállalat közös fejlesztése a VISAT tűnik. A következő szlájd négy ábráján először vázlatosan bemutatjuk a rendszert, majd a gépkocsit látjuk, ezután pedig a jobb és baloldali mérőtornyokat mutatjuk be. Amint az ábrákról látszik a GPS, INR és a CCD kamarák a furgon tetején helyezkednek el. A baloldali ábra második része bemutatja, a kamarák által felvett képpárt, míg a harmadik rész arra utal, hogy a képek feldolgozásával milyen objektumokkal gazdagodik a GIS. A jobboldali képen jól láthatók a gépkocsi és a rászerelt az érzékelő együttes. A VISAT rendszer egyik érdekessége, hogy a furgon tetejére rögzített érzékelő blokkokban 8 CCD kamara foglal helyet. Ez lehetővé teszi, hogy az objektumot mindig azokból a képekből értékeljék ki, melyek tartalmi illetve pontossági szempontból a legtöbbet nyújtanak. A CCD kamarák vezérlését külön egység hajtja végre. E kamarákon kívül egy videókamara is része a
rendszernek (a szerepéről nem sok szó esik a leírásokban), két L1/L2 GPS vevő, és egy INR gondoskodik a helyzetmeghatározásról, az ABS rendszer fordulatszámláló kimenetét az expozíciós időpontok kijelőlésére használják (meghatározott távolságokra és nem eltelt időre exponálnak). Az összes érzékelő egy pentium PC-hez van interfészelve, mely programozott megszakításokkal vezérli a különböző adatáramlatokat. A mérési eredmények feldolgozására szolgáló munkaállomásra telepített szoftver együttest GEOSTATIONnak nevezték. A szoftver a kiválasztott és kiértékelt objektumokat GIS struktúrában tárolja. Az 1997 végén kibocsájtott VISAT nevű feldolgozó programjuk már PC-n fut WINDOWS 95 alatt. Az inerciális navigációs rendszereknél tárgyaltakhoz képest két változást figyelhetünk meg. Megjelent a c-vel jelölt kamara koordináta rendszer, melynek kezdőpontja valamelyik kamara objektívjének vetítési középpontja,
másfelől az eddig n-nel jelölt földi koordináta rendszert az ábrán m-mel jelöltük arra utalva hogy a térképezést tetszőleges rendszerben végrehajthatjuk. Feladatunk az i indexű pont helyzetvektorának (derékszögű koordinátáinak) meghatározása a térképezés m , koordináta rendszerében: ahol rm i a meghatározandó pont keresett koordináta hármasa az m rendszerben, r INS m (t) az inerciális rendszer kezdőpontjának koordinátái az m rendszerben (tulajdonképpen ezeket az értékeket határozzuk meg az inerciális rendszer és a GPS integrálásából), (t) a fényképezés időpillanata, Rm b (t) a b kordináta rendszerből az m-be forgató forgatási mátrix (az előző pontban amikor a térképezés koordinátarendszere az n volt ezt a mátrixot Cn b nek neveztük), Rb c a kamara koordináta rendszer és a test koordináta rendszer közötti differenciális forgatási mátrix (a két koordináta rendszer tengelyeit igyekeznek párhuzamosan elhelyezni) -
elemeit a kalibráció során határozzák meg a mérés előtt, rc az objektum koordinátái a képkoordináta rendszerben, ab a c rendszer kezdőpontjának koordinátái a b rendszerben (szintén a kalibrálás során mérik), Si méretarány tényező, mely az egy pont - egy kamara viszonyra jellemző. A vektor egyenlet négy ismeretlent tartalmaz: rm i három koordinátáját és az Si méretarány tényezőt három egyenletben, a vektor egyenlet ugyanis három skaláris egyenletre bontható. Ha ugyanaz a pont N képen képződik le úgy a meghatározás szabadságfoka (3N-3-N). Ha tehát a kérdéses pont csak két képen van rajta úgy a meghatározás szabadságfoka 1. A rendszer 30 cm-es meghatározási pontosságot célzott meg, ehhez a GPS/INR helymeghatározást 10-15 cm-es pontossággal kell végezni, az INR szögértékei 1-5 pontosak, a kalibrálás során mért távolságok 2-5 mm hibával terheltek, a kalibrált szögértékek pedig 1-5 pontosak. A fotogrammetriai
kiértékelés pontossága 0.5 pixel A kisérleti mérések során 30 m-es maximális kamara - objektum távolság esetén a középhiba nem haladta meg vizszíntes értelemben a 16 cm-t, magassági értelemben pedig a 7 cm-t. A GPSvanTM rendszert az Ohio Állami Egyetem Térképészeti Központjában fejlesztették ki az elmúlt 5 évben. Amint az alsó ábrából látható a rendszer nem alkalmaz inerciális navigációs rendszert a GPS-szel nem mérhető helyek (alagutak, erdők, magas beépítésű városok, stb.) pozicionálására, e helyett a kerékfordulatszámok méréséből interpolálja két GPS mérési pont közé a helyzeti koordinátákat. A gépkocsi két db. 18 m-es bázison rögzített CCD kamarával van ellátva. Az ipari-kísérleti feladatokhoz 768x480 pixeles kamarákat használtak. Mivel ez a kamara viszonylag durva felbontásával már 10 m tárgytávolság esetén eleve 5-15 cm hibával terheli a mérést, kisérleteket végeztek 1000x1000 pixeles kamarákkal
is, melyekkel elérhető, hogy a felbontásból eredő hiba 5 m tárgytávolság esetén kevesebb mint 3 cm, 25 m tárgytávolság esetén pedig kevesebb mint 15 cm legyen. Mégis, az ipari mérések vizsgálata (több mint 9000 km vasúti váltó és egyéb vasúti jelölés felmérése) azt bizonyította, hogy az átlagosan 50 cm hiba főrészét kb. 30 cm-t a DR rendszer okozza A Lambda Tech. International GPSVision nevű rendszerének leírásából két olyan kérdésre is választ kapunk, melyekről az előző ismertetések hallgattak: milyen tipusú GPS észlelést alkalmaznak és milyen formában használják a Kalman szűrőt. Előbb azonban ismerjük meg a rendszer általános jellemzőit. Az első generációs GPSVision egység egy Trimble ProXL kód-fázis GPS vevőből, egy Liton LN-200 inerciális navigációs rendszerből, és két nagyfelbontású szines CCD kamarából áll. Lehetőség van más GPS alkalmazására is pld a Trimble SSI GPS vevőt használják ha a
pontmeghatározás pontossági igénye 10-20 cm. Másik érdekes tulajdonsága a rendszernek, hogy az érzékelők dobozba vannak szerelve és tetszés szerinti gépkocsira felerősíthetők. A rendszer a GPS távolságok kettős különbsége alapján működik. Ha i és j jelöl két műholdat, b az ismert bázis ponton álló GPS vevő helyét, r pedig a mozgó vevő helyét, tehát a mérőkocsit, akkor a mért távolságok különbségére felírható, hogy egyenlő a koordinátákból számolható távolságok különbségével. Jelöljük R-el az úgynevezett pseudo távolságokat, -val a koordinátákból számítható távolságokat (pld. ) akkor . Mivel a műholdak koordinátáit ismerjük, a bázis állomás koordinátáit szintúgy, a R értékeket megmértük, a kifejezésben csak az r három koordinátája az ismeretlen. A megoldáshoz tehát három kettős távolságkülönbségre van szükség, amihez legalább négy olyan szatellita szükséges, mely mind a mozgó,
mind a bázis állomásról észlelhető. A Kalman szűrő olyan matematikai eljárás, mely a dinamikus modell felhasználásával megbecsüli valamely k+1 időpontban a rendszer állapotát, és egybeveti ezt az értéket valmely pontos értékkel a kérdéses időpontban. A rendszer statisztikai tulajdonságai valamint a becsült és mért értékek eltérése alapján a módszer megjavítja a vizsgált szakaszra (a két mérés közé) eső előzetes értékeket és a folyamat folytatódik. A GPSVision decentralizált szűrő módszert alkalmaz, melynek az a lényege, hogy nem számolja ki a Kalman féle becsült értékeket hanem e helyett az inerciális rendszer outputját használja. A simítás javítása érdekében a szűrőeljárást mindkét irányba lefuttatják. A külső adtokkal ellátott képek kiértékelésére WINDOWS NT/95 alatt futó felhasználóbarát programrendszert is kidolgoztak. A rendszer lehetővé teszi a képek szemlélését, képpárok
összeválogatását és a felhasználó által kijelölt objektum szemiautomatikus kiértékelését. Gyalogosan használható INS+GPS pozicionáló rendszer 14 kg. 4 órára elég elemmel Az Inerciális Navigációs egység: 3 lézer gyűrű giro és 3 gyorsulásmérő, LEICA MX 9400 12 csatornás GPS, DAP PC9800 kézi vezérlő és adatgyűjtésre. navigációra Koordináta kiegyenlítés a helyzet megadások között. Mérés előtt az INS-t ismert alapponton 20 percig kell inicializálni (beállítani az Északi irányra). Fedett terepen automatikusan inerciális mérésre kapcsol. Ilyenkor legalább 2 óránként fix pont vagy DGPS. Ezen kívül az inerciális üzemmódban rendszeres megállás is kell. Kitűzéshez célszerű az INS és GPS szimultán alkalmazása
 Mesterházy Attila 1974. január 30-án született Pécsen. 1980-1988 között a Hriszto Botev Általános Iskolába, 1988-1992 között a Lovassy László Gimnáziumba járt; mindkettőt Veszprémben végezte el. 1992-től a Budapesti Közgazdaságtudományi Egyetemre járt, ahol 1997-ben kitüntetéses közgazdasági oklevelet szerzett Nemzetközi kapcsolatok főszakirányon, Európa, illetve
Mesterházy Attila 1974. január 30-án született Pécsen. 1980-1988 között a Hriszto Botev Általános Iskolába, 1988-1992 között a Lovassy László Gimnáziumba járt; mindkettőt Veszprémben végezte el. 1992-től a Budapesti Közgazdaságtudományi Egyetemre járt, ahol 1997-ben kitüntetéses közgazdasági oklevelet szerzett Nemzetközi kapcsolatok főszakirányon, Európa, illetve