A doksi online olvasásához kérlek jelentkezz be!
A doksi online olvasásához kérlek jelentkezz be!
Nincs még értékelés. Legyél Te az első!





Tartalmi kivonat
Rugalmasságtani egyenletek Tevékenység: Olvassa el a bekezdést! Gyűjtse ki, majd tanulja meg a rugalmasságtani feladat adattípusait és a keresett mennyiségek nevét! Tartalom: Test szilárdságtani állapotának jellemzői: - u = u ( x, y, z ) elmozdulási vektormező, - A = A ( x, y, z ) alakváltozási tenzormező, - F = F ( x, y, z ) feszültségi tenzormező, - u = u ( x, y, z ) fajlagos alakváltozási energia (skalár) mező. A továbbiakban azokat az általános összefüggéseket írjuk fel, melyek kapcsolatot teremtenek az előbb felsorolt állapotjellemzők között lineárisan rugalmas alakváltozások esetén. Ezek a rugalmasságtani egyenletek. A rugalmasságtani feladat kitűzése: Adott: - a test méretei és alakja, - a test anyagának viselkedésére jellemző mennyiségek, - a test terhelése és megtámasztása. Keresett: - az u = u ( x, y, z ) elmozdulási vektormező, - az A = A ( x, y, z ) alakváltozási tenzormező, - az F = F ( x, y,
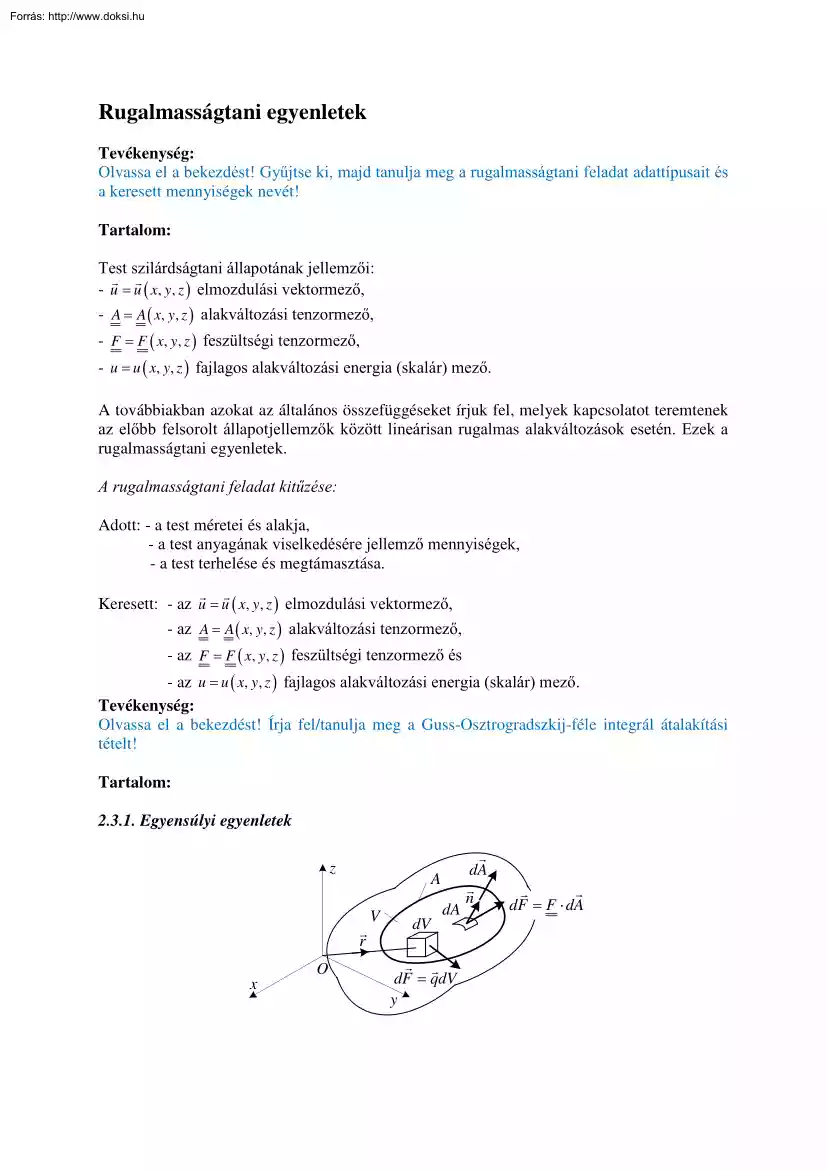
z ) feszültségi tenzormező és - az u = u ( x, y, z ) fajlagos alakváltozási energia (skalár) mező. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg a Guss-Osztrogradszkij-féle integrál átalakítási tételt! Tartalom: 2.31 Egyensúlyi egyenletek z A r O x V dV dA dF = qdV y dA n dF= F ⋅ dA Ragadjunk ki a rugalmas test belsejéből egy olyan V térfogatot, amely teljesen a test belsejében van. A V környezetének mechanikai hatásait erőkkel esszük figyelembe: - a V elemi térfogatára ható erő: dF = qdV és - a V elemi felületére ható erő: dF = ρdA =⋅ F n dA dA A V testrész egyensúlyban van: F = 0= ∫ qdV + ∫ F ⋅ ndA. (V ) ( A) A Gauss 1-Osztrogradszkij 2-féle integrál-átalakítási tétel szerint: ∫ F ⋅ ndA = ( A) ∫ F ⋅ ∇dV . (V ) A tétel nemcsak ⋅ skaláris szorzás, hanem × vektoriális és diadikus szorzás esetén is
érvényes. Ezt felhasználva: = 0 ∫ q dV + ∫ F ⋅ ∇dV . Átrendezve: ∫( (V ) (V ) q + F ⋅ ∇ dV = 0 . ) (V ) Az integrál bármely V térfogat választása esetén nulla, ez pedig csak akkor lehetséges, ha az integrandusz nulla. F ⋅∇ + q =0 . Ezt az összefüggést (vektoregyenletet) nevezzük egyensúlyi egyenletnek. Az egyensúlyi egyenletek skaláris alakja DDKR-ben: σx τ yx τ zx τ xy σy τ zy ∂ τ xz ∂x qx 0 ∂ 0 . τ yz + q y = ∂y σ z qz 0 ∂ ∂z Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg a skaláris egyenleteket! Tartalom: Elvégezve a szorzásokat az egyensúlyi egyenletek skaláris alakja: ∂σ x ∂τ xy ∂τ xz + + + qx = 0, ∂x ∂y ∂z ∂τ yx ∂x + ∂σ y ∂y + ∂τ yz ∂z + qy = 0, ∂τ zx ∂τ zy
∂σ z 0. + + + qz = ∂x ∂y ∂z Az egyensúlyi egyenletek a térfogati terhelés és a feszültségi állapot közötti összefüggést adják meg. 1 2 Carl Friedrich Gauss (1777-1855) német matematikus. Mihail Vasziljevics Osztrogradszkij (1801-1862) orosz matematikus. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg az elmozdulásmező, forgató tenzor, alakváltozási tenzor matematikai alakját! Tartalom: 3.32 Kinematikai egyenletek Ez a pont a kinematikai egyenletek kis alakváltozások esetén érvényes alakját vezeti le. A kinematikai egyenletek (geometriai egyenletek, kompatibilitási egyenletek) uQ = u ∆u adják meg az elmozdulásmező és Q alakváltozási mező közötti kapcsolatot. uP Az alakváltozási mező koordinátái nem dr függetlenek egymástól: az elmozdulásmező koordinátáiból uP P származtathatók megadott szabályok szerint. Vizsgáljuk meg az ábrán P -vel jelölt pont elemi környeztében lévő Q
pont elmozdulását: dr = dx ex + dy e y + dz ez , u =u ( x, y, z ) =u ( x, y, z ) ex + v( x, y , z ) e y + w( x, y , z ) ez . Az elmozdulásmező hely szerinti megváltozása: ∆u = uQ − u P = u − u P . Fejezzük ki az előző egyenletből u -t, majd a jobb oldalt fejtsük sorba: ∂u ∂u ∂u u= uP + dx + dy + dz + ∂x P ∂y P ∂z P .) ( . magasabb rendű tagok Az elmozdulásmező hely szerinti megváltozása lineáris közelítés esetén: ∂u ∂u ∂u dx dy + dz = ∆u ≈ du . + ∂x P e ⋅ dr ∂y P ∂z P e ⋅ dr e y ⋅ dr x z A jobb oldalon álló tagokból kiemelve r -t: ∂u ∂u ∂u du = ⋅ dr =D ⋅ dr , ex + ey + ez ∂y ∂z ∂x D − az elmozdulásmező derivált tenzora Az
elmozdulásmező derivált tenzora: ∂u ∂u ∂u D = ex + u ∇. ey + ez = ∂x ∂y ∂z A derivált tenzor felbontása szimmetrikus és ferde szimmetrikus részre: D= ( ) ( ) 1 1 T T D + D + D − D = A + Ψ. 2 2 A szimmetrikus rész a A az alakváltozási tenzor, mely az elemi környezet alakváltozására jellemző. A ferde szimmetrikus rész a Ψ forgató tenzor, amely az elemi környezet merevtestszerű szögelfordulását jellemzi. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg az alakváltozási tenzor előállítására szolgáló összefüggést és a hat skaláris egyenletet! Tartalom: Az alakváltozási tenzor előállítására szolgáló = A ( ) 1 1 T D + D= (u ∇ + ∇ u ) 2 2 összefüggést kinematikai (vagy geometriai) egyenletnek nevezzük. A kinematikai egyenlet ebben a formájában csak kis alakváltozások esetén érvényes. A kinematikai tenzoregyenletnek megfelelő
skalár egyenletek: ∂v εy = , ∂y ∂u ∂v γ xy = γ yx = + , ∂y ∂x ∂v ∂w γ yz = γ zy = + , ∂z ∂y ∂w εz = , ∂z ∂u ∂w γ xz =γzx = ∂ + ∂ . x z ∂u εx = , ∂x A kinematikai egyenletek az elmozdulásmező és az alakváltozási mező koordinátái között teremtenek kapcsolatot. Tevékenység: Olvassa el a bekezdést! Tanulja meg az általános Hooke törvényt, az izotróp fogalom jelentését! Írja fel és tanulja meg az általános Hooke törvény két alakját! Írja fel és tanulja meg az általános Hooke törvény két alakjához tartozó skaláris egyenleteket! Tartalom: 2.33 Anyagegyenletek - általános Hooke-törvény a) Általános Hooke-törvény izotróp anyagokra Izotróp: az anyagi viselkedés iránytól független. Izotróp anyagokra az általános Hooke 3 törvény két lehetséges alakja: ν ν 1 F 2G A + AI E . F − + ν FI E
, = 1 − 2ν 2G 1 A fenti egyenletekben a G csúsztató rugalmassági modulus és a ν Poisson-tényező anyagjellemzők, E az egységtenzor, FI a feszültségi tenzor első skalár invariánsa, AI = A pedig az alakváltozási tenzor első skalár invariánsa: FI = σ x + σ y + σ z , AI = ε x + ε y + ε z . ν Az = F 2G A + AI E tenzoregyenlet az alábbi skalár egyenleteket tartalmazza: 1 − 2ν ν σ = εx + ε y + εz , 2G ε x + x 1 − 2 ν ( 3 Robert Hooke (1635-1703) angol természettudós. ) ν σ = εx + ε y + εz , 2G ε y + y 1 − 2ν ν = σ z 2G ε z + εx + ε y + εz , 1 − 2ν τ xy = G γ xy , τ yz = G γ yz , τ xz = G γ xz . ( ) ( ) ν 1 F− FI E tenzoregyenlet az alábbi skalár egyenleteket tartalmazza: 2G 1+ ν ν 1 = εx σx − σx + σ y + σz , 2G 1+ ν ν 1 = εy σy
− σx + σ y + σz , 2G 1+ ν ν 1 = εz σz − σx + σ y + σz , 2G 1+ ν τ xy τ yz τ γ xy = , γ yz = , γ xz =xz . G G G E A 2G = összefüggés felhasználásával az előbbi egyenletrendszer első három egyenlete 1+ ν Az A = ( ) ( ) ( ) átrendezhető: ν ν 1 1+ ν σx − σx + σ y + σ= σx − σx + σ y + σ= z z E 2G 1+ ν 1+ ν 1 ν ν = σx - σ y - σz . E E E ν ν 1 Hasonló gondolatmenettel: ε y =− σ x + σ y − σ z , E E E ν ν 1 ε z =− σ x − σ y + σ z . E E E = εx ( ) ( ) Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg az általános Hooke törvény izotóp anyagra vonatkozó mátrix alakját! Tartalom: Ezt felhasználva az izotóp anyagra vonatkozó Hooke-törvény mátrix alakban is felírható: 1 E ν ε x − E ε y − ν εz E = γ xy
0 γ yz γ xz 0 0 ν E 1 E ν − E − ν E ν − E 1 E − 0 0 0 0 0 0 0 0 1 G 0 0 0 0 1 G 0 0 0 0 0 0 σx σy 0 σz τ , 0 xy τ yz 0 τ xz 1 G vagy tömören ε = S σ = C −1 σ, σ = C ε, ahol ε az alakváltozási jellemzők oszlopmátrixa (oszlopvektora), σ a feszültségek oszlopmátrixa (oszlopvektora), S =C −1 az anyagjellemzők mátrixa. Tevékenység: Olvassa el a bekezdést! Tanulja meg ortotróp fogalom jelentését! Gyűjtse ki és tanulja meg a kompozitok jellemzőit! Tartalom: b) Általános Hooke törvény ortotróp anyagokra Ortotrópia: az anizotrópia (iránytól függő anyagi viselkedés) olyan speciális esete, amikor az anyag viselkedése egymásra merőleges irányokban vett anyagjellemzőkkel leírható. Ez az eset a műszaki
gyakorlatban sokszor előfordul, például egyes szálerősített műanyagok (kompozit anyagok) esetén. A kompozitok többféle, eltérő tulajdonságú anyagból összetett, összeépített anyagok. A kompozitok egy 3 szálak speciális fajtája a szálerősített műanyag. mátrix A szálerősített műanyagok általában jobb mechanikai tulajdonságokkal rendelkeznek, mint alkotórészeik. Előnyük, hogy lényegesen kisebb önsúly 2 esetén érhető el velük ugyanaz a 1 szilárdság és merevség, mint a hagyományos (pl. acél) szerkezeti anyagoknál. Az ábrán egyirányban futó szálakkal erősített anyag látható. A szálak anyaga lehet pl grafit vagy üveg, míg a mátrix (az ágyazó anyag) polimer, kerámia, fém stb. Valóság: a szálak és a mátrix anyaga eltérő tulajdonságú, ezért az anyag nem homogén. Kompozit makroszkópikus mechanikai modellje: homogén, anizotróp anyag. Az anyag az 1, 2,3 irányban különböző tulajdonságokat mutat. Az 1, 2,3 az
anyag természetes (szálirányhoz illeszkedő) koordinátarendszere. Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg az általános Hooke törvény ortotróp anyagra vonatkozó mátrix alakját! Tanulja meg a mátrix elemeinek a jelölését, mechanikai jelentésüket! Tartalom: Az általános Hooke törvény ortotróp anyagra: 1 E 1 ν12 − ε1 E1 ε 2 − ν13 ε3 E1 = γ12 0 γ 23 γ13 0 0 vagy tömören ε = S σ = C −1 σ, ν 21 E2 − ν 31 E3 0 0 1 E2 − ν 32 E3 0 0 ν 23 E2 1 E3 0 0 0 0 1 G12 0 0 0 0 1 G23 0 0 0 0 − − 0 0 σ1 σ 0 2 σ3 , τ 0 12 τ23 τ 0 13 1 G13 σ = C ε. E1 , E2 , E3 az 1, 2,3 irányhoz tartozó
rugalmassági modulusok, G12 , G23 , G13 a csúsztató rugalmassági modulusok, ν12 , ν 23 , . a Poisson tényezők Pl: ν12 az 1 irányú húzáshoz tartozó 2 irányú nyúlást adja meg. Mivel az U alakváltozási energia mindig pozitív mennyiség, ezért az anyagállandók −1 S = C mátrixa szimmetrikus. Ezért: ν 21 ν12 = , E2 E1 ν 32 ν 23 = , E3 E2 ν13 ν 31 = . E1 E3 A lineárisan rugalmas ortotróp anyag 9 független anyagállandóval jellemezhető: E1 , E2 , E3 , G12 , G23 , G13 , ν12 , ν 23 , ν13 . Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg ortotróp anyagra vonatkozó a Hooke törvényt az x, y, z koordinátarendszerben! Tartalom: Kérdés: hogyan írható fel az ortotróp anyagra vonatkozó Hooke törvény az x, y, z KR-ben? 3 1 z x O y 2 Erre azért van szükség, mert sok esetben nem az anyag természetes koordinátarendszerében dolgozunk. A feszültségeket és az alakváltozási jellemzőket transzformálnunk kell a
megfelelő KR-be. Itt azonban nem a szokásos koordináta transzformációról van szó! Vizsgáljuk meg a feszültségek transzformációját! Pl.: a σn feszültségkoordináta kiszámítása az x, y, z KR-ben vett mennyiségekkel: Az irány egységvektor: z n = nx ex + n y e y + nz ez = cos αex + cos βe y + cos γez . n γ n = 1 = cos 2 α + cos 2 β + cos 2 γ. σ n = n ⋅ F ⋅ n= n ⋅ ρn . O x α β y σ x τ xy τ xz nx σ x nx + τ xy n y + τ xz nz [ρn ] = F ⋅ n = τ yx σ y τ yz ny = τ yx nx + σ y ny + τ yz nz . τ zx τ zy σ z nz τ zx nx + τ zy n y + σ z nz 2 2 σ n = n ⋅ ρn = σ x nx + τ yx n y nx + τ zx nz nx + τ xy nx n y + σ y n y + τ zy nz n y + τ xz nx nz + τ yz n y nz + σ z nz2 . Az azonos számú vonallal aláhúzott tagokat
összevonva: ( ) σ n = σ x nx2 + σ y n y2 + σ z nz2 + 2 τ xy nx n y + τ yz n y nz + τ zx nz nx . A többi feszültségkoordinátára ugyanez a gondolatmenet érvényes. Tevékenység: Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a peremfeltétel típusok nevét és a hozzájuk tartozó matematikai összefüggést! 2.34 Peremfeltételek n z p0 dA Au Ap O x y Az előzőekben felírt tizenöt egyenletből álló differenciál-, illetve algebrai egyenletrendszer egyértelmű megoldásához szükségünk van a peremfeltételek megadására is. Kinematikai peremfeltételek: előírt (ismert) elmozdulás u = u0 (az Au felületen). Dinamikai peremfeltételek: előírt (ismert) felületi terhelés F ⋅n = p0 (az Ap felületen). Az eddigieket összefoglalva a rugalmasságtan egyenletrendszere és peremfeltételei: - F ⋅ ∇ + q = 0 egyensúlyi egyenlet (3 db skalár), 1 ( u ∇ + ∇ u ) kinematikai egyenlet (6 db
skalár), 2 ν 1 -A = F− FI E anyagegyenlet (6 db skalár), 2G 1+ ν - u A = u0 kinematikai peremfeltétel (3 db skalár), -A = u - (F ⋅ n) Ap = p0 dinamikai peremfeltétel (3 db skalár). Tevékenység: Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a rugalmassági peremfeltétel feladatok megoldástípusait! Tartalom: Bizonyítható, hogy a rugalmasságtan egyenletrendszerének adott peremfeltételek mellett egy és csak egy megoldása létezik (egzisztencia és unicitás). Egzakt megoldás: ha a keresett mezők a rugalmasságtan egyenletrendszerének minden egyenletét kielégítik. Közelítő megoldás: amikor a keresett mezők nem elégítik ki a rugalmasságtan egyenletrendszerének minden egyenletét. A keresett mezők: - u = u ( x, y, z ) elmozdulási vektormező, - A = A ( x, y, z ) alakváltozási tenzormező, - F = F ( x, y, z ) feszültségi tenzormező. A fenti egyenletrendszer egzakt megoldásának
előállítása a mérnöki problémák túlnyomó többségénél nem lehetséges. Ezért a mérnöki feladatoknál leggyakrabban közelítő megoldások előállításával is megelégszünk. Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg a Saint-Venant-féle kompatibilitási egyenlet tenzoriális alakját és DDKR-ben a skaláris egyenleteket! Tartalom: 2.35 A kompatibilitási egyenletek más alakja A Saint-Venant-féle kompatibilitási egyenlet: Szorozzuk be a = A 1 (u ∇ + ∇ u ) 2 alakban felírt kompatibilitási egyenlet mindkét oldalát jobbról és balról vektoriálisan ∇ -val. Ekkor kapjuk a Saint-Venant 4-féle kompatibilitási egyenletet: ∇ × A × ∇ = 0. A Saint-Venant-féle kompatibilitási feltétel egyenletei DDKR-ben: ∂ 2 γ xy ∂ 2 ε x ∂ 2 ε y = + 2 , ∂x∂y ∂y 2 ∂x ∂ 2 γ yz ∂ 2 ε y ∂ 2 ε z = + 2 , ∂y∂z ∂z 2 ∂y ∂ 2 γ zx ∂ 2 ε z ∂ 2 ε x = + 2 , ∂z∂x ∂x 2 ∂z 2 ∂ εx ∂
∂γ xy ∂γ zx ∂γ yz 2 = + − , ∂y∂z ∂x ∂z ∂y ∂x ∂ 2ε y ∂ ∂γ yz ∂γ xy ∂γ zx 2 = + − , ∂z∂x ∂y ∂x ∂z ∂y ∂ 2ε z ∂ ∂γ zx ∂γ yz ∂γ xy 2 = + − . ∂x∂y ∂z ∂y ∂x ∂z 4 Adhémar Jean Claude Barré de Saint-Venant (1797-1886) francia fizikus
z ) feszültségi tenzormező és - az u = u ( x, y, z ) fajlagos alakváltozási energia (skalár) mező. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg a Guss-Osztrogradszkij-féle integrál átalakítási tételt! Tartalom: 2.31 Egyensúlyi egyenletek z A r O x V dV dA dF = qdV y dA n dF= F ⋅ dA Ragadjunk ki a rugalmas test belsejéből egy olyan V térfogatot, amely teljesen a test belsejében van. A V környezetének mechanikai hatásait erőkkel esszük figyelembe: - a V elemi térfogatára ható erő: dF = qdV és - a V elemi felületére ható erő: dF = ρdA =⋅ F n dA dA A V testrész egyensúlyban van: F = 0= ∫ qdV + ∫ F ⋅ ndA. (V ) ( A) A Gauss 1-Osztrogradszkij 2-féle integrál-átalakítási tétel szerint: ∫ F ⋅ ndA = ( A) ∫ F ⋅ ∇dV . (V ) A tétel nemcsak ⋅ skaláris szorzás, hanem × vektoriális és diadikus szorzás esetén is
érvényes. Ezt felhasználva: = 0 ∫ q dV + ∫ F ⋅ ∇dV . Átrendezve: ∫( (V ) (V ) q + F ⋅ ∇ dV = 0 . ) (V ) Az integrál bármely V térfogat választása esetén nulla, ez pedig csak akkor lehetséges, ha az integrandusz nulla. F ⋅∇ + q =0 . Ezt az összefüggést (vektoregyenletet) nevezzük egyensúlyi egyenletnek. Az egyensúlyi egyenletek skaláris alakja DDKR-ben: σx τ yx τ zx τ xy σy τ zy ∂ τ xz ∂x qx 0 ∂ 0 . τ yz + q y = ∂y σ z qz 0 ∂ ∂z Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg a skaláris egyenleteket! Tartalom: Elvégezve a szorzásokat az egyensúlyi egyenletek skaláris alakja: ∂σ x ∂τ xy ∂τ xz + + + qx = 0, ∂x ∂y ∂z ∂τ yx ∂x + ∂σ y ∂y + ∂τ yz ∂z + qy = 0, ∂τ zx ∂τ zy
∂σ z 0. + + + qz = ∂x ∂y ∂z Az egyensúlyi egyenletek a térfogati terhelés és a feszültségi állapot közötti összefüggést adják meg. 1 2 Carl Friedrich Gauss (1777-1855) német matematikus. Mihail Vasziljevics Osztrogradszkij (1801-1862) orosz matematikus. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg az elmozdulásmező, forgató tenzor, alakváltozási tenzor matematikai alakját! Tartalom: 3.32 Kinematikai egyenletek Ez a pont a kinematikai egyenletek kis alakváltozások esetén érvényes alakját vezeti le. A kinematikai egyenletek (geometriai egyenletek, kompatibilitási egyenletek) uQ = u ∆u adják meg az elmozdulásmező és Q alakváltozási mező közötti kapcsolatot. uP Az alakváltozási mező koordinátái nem dr függetlenek egymástól: az elmozdulásmező koordinátáiból uP P származtathatók megadott szabályok szerint. Vizsgáljuk meg az ábrán P -vel jelölt pont elemi környeztében lévő Q
pont elmozdulását: dr = dx ex + dy e y + dz ez , u =u ( x, y, z ) =u ( x, y, z ) ex + v( x, y , z ) e y + w( x, y , z ) ez . Az elmozdulásmező hely szerinti megváltozása: ∆u = uQ − u P = u − u P . Fejezzük ki az előző egyenletből u -t, majd a jobb oldalt fejtsük sorba: ∂u ∂u ∂u u= uP + dx + dy + dz + ∂x P ∂y P ∂z P .) ( . magasabb rendű tagok Az elmozdulásmező hely szerinti megváltozása lineáris közelítés esetén: ∂u ∂u ∂u dx dy + dz = ∆u ≈ du . + ∂x P e ⋅ dr ∂y P ∂z P e ⋅ dr e y ⋅ dr x z A jobb oldalon álló tagokból kiemelve r -t: ∂u ∂u ∂u du = ⋅ dr =D ⋅ dr , ex + ey + ez ∂y ∂z ∂x D − az elmozdulásmező derivált tenzora Az
elmozdulásmező derivált tenzora: ∂u ∂u ∂u D = ex + u ∇. ey + ez = ∂x ∂y ∂z A derivált tenzor felbontása szimmetrikus és ferde szimmetrikus részre: D= ( ) ( ) 1 1 T T D + D + D − D = A + Ψ. 2 2 A szimmetrikus rész a A az alakváltozási tenzor, mely az elemi környezet alakváltozására jellemző. A ferde szimmetrikus rész a Ψ forgató tenzor, amely az elemi környezet merevtestszerű szögelfordulását jellemzi. Tevékenység: Olvassa el a bekezdést! Írja fel/tanulja meg az alakváltozási tenzor előállítására szolgáló összefüggést és a hat skaláris egyenletet! Tartalom: Az alakváltozási tenzor előállítására szolgáló = A ( ) 1 1 T D + D= (u ∇ + ∇ u ) 2 2 összefüggést kinematikai (vagy geometriai) egyenletnek nevezzük. A kinematikai egyenlet ebben a formájában csak kis alakváltozások esetén érvényes. A kinematikai tenzoregyenletnek megfelelő
skalár egyenletek: ∂v εy = , ∂y ∂u ∂v γ xy = γ yx = + , ∂y ∂x ∂v ∂w γ yz = γ zy = + , ∂z ∂y ∂w εz = , ∂z ∂u ∂w γ xz =γzx = ∂ + ∂ . x z ∂u εx = , ∂x A kinematikai egyenletek az elmozdulásmező és az alakváltozási mező koordinátái között teremtenek kapcsolatot. Tevékenység: Olvassa el a bekezdést! Tanulja meg az általános Hooke törvényt, az izotróp fogalom jelentését! Írja fel és tanulja meg az általános Hooke törvény két alakját! Írja fel és tanulja meg az általános Hooke törvény két alakjához tartozó skaláris egyenleteket! Tartalom: 2.33 Anyagegyenletek - általános Hooke-törvény a) Általános Hooke-törvény izotróp anyagokra Izotróp: az anyagi viselkedés iránytól független. Izotróp anyagokra az általános Hooke 3 törvény két lehetséges alakja: ν ν 1 F 2G A + AI E . F − + ν FI E
, = 1 − 2ν 2G 1 A fenti egyenletekben a G csúsztató rugalmassági modulus és a ν Poisson-tényező anyagjellemzők, E az egységtenzor, FI a feszültségi tenzor első skalár invariánsa, AI = A pedig az alakváltozási tenzor első skalár invariánsa: FI = σ x + σ y + σ z , AI = ε x + ε y + ε z . ν Az = F 2G A + AI E tenzoregyenlet az alábbi skalár egyenleteket tartalmazza: 1 − 2ν ν σ = εx + ε y + εz , 2G ε x + x 1 − 2 ν ( 3 Robert Hooke (1635-1703) angol természettudós. ) ν σ = εx + ε y + εz , 2G ε y + y 1 − 2ν ν = σ z 2G ε z + εx + ε y + εz , 1 − 2ν τ xy = G γ xy , τ yz = G γ yz , τ xz = G γ xz . ( ) ( ) ν 1 F− FI E tenzoregyenlet az alábbi skalár egyenleteket tartalmazza: 2G 1+ ν ν 1 = εx σx − σx + σ y + σz , 2G 1+ ν ν 1 = εy σy
− σx + σ y + σz , 2G 1+ ν ν 1 = εz σz − σx + σ y + σz , 2G 1+ ν τ xy τ yz τ γ xy = , γ yz = , γ xz =xz . G G G E A 2G = összefüggés felhasználásával az előbbi egyenletrendszer első három egyenlete 1+ ν Az A = ( ) ( ) ( ) átrendezhető: ν ν 1 1+ ν σx − σx + σ y + σ= σx − σx + σ y + σ= z z E 2G 1+ ν 1+ ν 1 ν ν = σx - σ y - σz . E E E ν ν 1 Hasonló gondolatmenettel: ε y =− σ x + σ y − σ z , E E E ν ν 1 ε z =− σ x − σ y + σ z . E E E = εx ( ) ( ) Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg az általános Hooke törvény izotóp anyagra vonatkozó mátrix alakját! Tartalom: Ezt felhasználva az izotóp anyagra vonatkozó Hooke-törvény mátrix alakban is felírható: 1 E ν ε x − E ε y − ν εz E = γ xy
0 γ yz γ xz 0 0 ν E 1 E ν − E − ν E ν − E 1 E − 0 0 0 0 0 0 0 0 1 G 0 0 0 0 1 G 0 0 0 0 0 0 σx σy 0 σz τ , 0 xy τ yz 0 τ xz 1 G vagy tömören ε = S σ = C −1 σ, σ = C ε, ahol ε az alakváltozási jellemzők oszlopmátrixa (oszlopvektora), σ a feszültségek oszlopmátrixa (oszlopvektora), S =C −1 az anyagjellemzők mátrixa. Tevékenység: Olvassa el a bekezdést! Tanulja meg ortotróp fogalom jelentését! Gyűjtse ki és tanulja meg a kompozitok jellemzőit! Tartalom: b) Általános Hooke törvény ortotróp anyagokra Ortotrópia: az anizotrópia (iránytól függő anyagi viselkedés) olyan speciális esete, amikor az anyag viselkedése egymásra merőleges irányokban vett anyagjellemzőkkel leírható. Ez az eset a műszaki
gyakorlatban sokszor előfordul, például egyes szálerősített műanyagok (kompozit anyagok) esetén. A kompozitok többféle, eltérő tulajdonságú anyagból összetett, összeépített anyagok. A kompozitok egy 3 szálak speciális fajtája a szálerősített műanyag. mátrix A szálerősített műanyagok általában jobb mechanikai tulajdonságokkal rendelkeznek, mint alkotórészeik. Előnyük, hogy lényegesen kisebb önsúly 2 esetén érhető el velük ugyanaz a 1 szilárdság és merevség, mint a hagyományos (pl. acél) szerkezeti anyagoknál. Az ábrán egyirányban futó szálakkal erősített anyag látható. A szálak anyaga lehet pl grafit vagy üveg, míg a mátrix (az ágyazó anyag) polimer, kerámia, fém stb. Valóság: a szálak és a mátrix anyaga eltérő tulajdonságú, ezért az anyag nem homogén. Kompozit makroszkópikus mechanikai modellje: homogén, anizotróp anyag. Az anyag az 1, 2,3 irányban különböző tulajdonságokat mutat. Az 1, 2,3 az
anyag természetes (szálirányhoz illeszkedő) koordinátarendszere. Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg az általános Hooke törvény ortotróp anyagra vonatkozó mátrix alakját! Tanulja meg a mátrix elemeinek a jelölését, mechanikai jelentésüket! Tartalom: Az általános Hooke törvény ortotróp anyagra: 1 E 1 ν12 − ε1 E1 ε 2 − ν13 ε3 E1 = γ12 0 γ 23 γ13 0 0 vagy tömören ε = S σ = C −1 σ, ν 21 E2 − ν 31 E3 0 0 1 E2 − ν 32 E3 0 0 ν 23 E2 1 E3 0 0 0 0 1 G12 0 0 0 0 1 G23 0 0 0 0 − − 0 0 σ1 σ 0 2 σ3 , τ 0 12 τ23 τ 0 13 1 G13 σ = C ε. E1 , E2 , E3 az 1, 2,3 irányhoz tartozó
rugalmassági modulusok, G12 , G23 , G13 a csúsztató rugalmassági modulusok, ν12 , ν 23 , . a Poisson tényezők Pl: ν12 az 1 irányú húzáshoz tartozó 2 irányú nyúlást adja meg. Mivel az U alakváltozási energia mindig pozitív mennyiség, ezért az anyagállandók −1 S = C mátrixa szimmetrikus. Ezért: ν 21 ν12 = , E2 E1 ν 32 ν 23 = , E3 E2 ν13 ν 31 = . E1 E3 A lineárisan rugalmas ortotróp anyag 9 független anyagállandóval jellemezhető: E1 , E2 , E3 , G12 , G23 , G13 , ν12 , ν 23 , ν13 . Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg ortotróp anyagra vonatkozó a Hooke törvényt az x, y, z koordinátarendszerben! Tartalom: Kérdés: hogyan írható fel az ortotróp anyagra vonatkozó Hooke törvény az x, y, z KR-ben? 3 1 z x O y 2 Erre azért van szükség, mert sok esetben nem az anyag természetes koordinátarendszerében dolgozunk. A feszültségeket és az alakváltozási jellemzőket transzformálnunk kell a
megfelelő KR-be. Itt azonban nem a szokásos koordináta transzformációról van szó! Vizsgáljuk meg a feszültségek transzformációját! Pl.: a σn feszültségkoordináta kiszámítása az x, y, z KR-ben vett mennyiségekkel: Az irány egységvektor: z n = nx ex + n y e y + nz ez = cos αex + cos βe y + cos γez . n γ n = 1 = cos 2 α + cos 2 β + cos 2 γ. σ n = n ⋅ F ⋅ n= n ⋅ ρn . O x α β y σ x τ xy τ xz nx σ x nx + τ xy n y + τ xz nz [ρn ] = F ⋅ n = τ yx σ y τ yz ny = τ yx nx + σ y ny + τ yz nz . τ zx τ zy σ z nz τ zx nx + τ zy n y + σ z nz 2 2 σ n = n ⋅ ρn = σ x nx + τ yx n y nx + τ zx nz nx + τ xy nx n y + σ y n y + τ zy nz n y + τ xz nx nz + τ yz n y nz + σ z nz2 . Az azonos számú vonallal aláhúzott tagokat
összevonva: ( ) σ n = σ x nx2 + σ y n y2 + σ z nz2 + 2 τ xy nx n y + τ yz n y nz + τ zx nz nx . A többi feszültségkoordinátára ugyanez a gondolatmenet érvényes. Tevékenység: Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a peremfeltétel típusok nevét és a hozzájuk tartozó matematikai összefüggést! 2.34 Peremfeltételek n z p0 dA Au Ap O x y Az előzőekben felírt tizenöt egyenletből álló differenciál-, illetve algebrai egyenletrendszer egyértelmű megoldásához szükségünk van a peremfeltételek megadására is. Kinematikai peremfeltételek: előírt (ismert) elmozdulás u = u0 (az Au felületen). Dinamikai peremfeltételek: előírt (ismert) felületi terhelés F ⋅n = p0 (az Ap felületen). Az eddigieket összefoglalva a rugalmasságtan egyenletrendszere és peremfeltételei: - F ⋅ ∇ + q = 0 egyensúlyi egyenlet (3 db skalár), 1 ( u ∇ + ∇ u ) kinematikai egyenlet (6 db
skalár), 2 ν 1 -A = F− FI E anyagegyenlet (6 db skalár), 2G 1+ ν - u A = u0 kinematikai peremfeltétel (3 db skalár), -A = u - (F ⋅ n) Ap = p0 dinamikai peremfeltétel (3 db skalár). Tevékenység: Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a rugalmassági peremfeltétel feladatok megoldástípusait! Tartalom: Bizonyítható, hogy a rugalmasságtan egyenletrendszerének adott peremfeltételek mellett egy és csak egy megoldása létezik (egzisztencia és unicitás). Egzakt megoldás: ha a keresett mezők a rugalmasságtan egyenletrendszerének minden egyenletét kielégítik. Közelítő megoldás: amikor a keresett mezők nem elégítik ki a rugalmasságtan egyenletrendszerének minden egyenletét. A keresett mezők: - u = u ( x, y, z ) elmozdulási vektormező, - A = A ( x, y, z ) alakváltozási tenzormező, - F = F ( x, y, z ) feszültségi tenzormező. A fenti egyenletrendszer egzakt megoldásának
előállítása a mérnöki problémák túlnyomó többségénél nem lehetséges. Ezért a mérnöki feladatoknál leggyakrabban közelítő megoldások előállításával is megelégszünk. Tevékenység: Olvassa el a bekezdést! Írja fel és tanulja meg a Saint-Venant-féle kompatibilitási egyenlet tenzoriális alakját és DDKR-ben a skaláris egyenleteket! Tartalom: 2.35 A kompatibilitási egyenletek más alakja A Saint-Venant-féle kompatibilitási egyenlet: Szorozzuk be a = A 1 (u ∇ + ∇ u ) 2 alakban felírt kompatibilitási egyenlet mindkét oldalát jobbról és balról vektoriálisan ∇ -val. Ekkor kapjuk a Saint-Venant 4-féle kompatibilitási egyenletet: ∇ × A × ∇ = 0. A Saint-Venant-féle kompatibilitási feltétel egyenletei DDKR-ben: ∂ 2 γ xy ∂ 2 ε x ∂ 2 ε y = + 2 , ∂x∂y ∂y 2 ∂x ∂ 2 γ yz ∂ 2 ε y ∂ 2 ε z = + 2 , ∂y∂z ∂z 2 ∂y ∂ 2 γ zx ∂ 2 ε z ∂ 2 ε x = + 2 , ∂z∂x ∂x 2 ∂z 2 ∂ εx ∂
∂γ xy ∂γ zx ∂γ yz 2 = + − , ∂y∂z ∂x ∂z ∂y ∂x ∂ 2ε y ∂ ∂γ yz ∂γ xy ∂γ zx 2 = + − , ∂z∂x ∂y ∂x ∂z ∂y ∂ 2ε z ∂ ∂γ zx ∂γ yz ∂γ xy 2 = + − . ∂x∂y ∂z ∂y ∂x ∂z 4 Adhémar Jean Claude Barré de Saint-Venant (1797-1886) francia fizikus
 Évről-évre egyre jelentősebbé válik az internetes álláspiac, hiszen számos offline hirdetési forma szűnt meg az álláskereső portálok térnyerésével. A gördülékeny egymásra találásnak köszönhetően a munkahelyváltás könnyebb, mint valaha. Tudd meg, hogyan!
Évről-évre egyre jelentősebbé válik az internetes álláspiac, hiszen számos offline hirdetési forma szűnt meg az álláskereső portálok térnyerésével. A gördülékeny egymásra találásnak köszönhetően a munkahelyváltás könnyebb, mint valaha. Tudd meg, hogyan!