Értékelések
Nincs még értékelés. Legyél Te az első!





Tartalmi kivonat
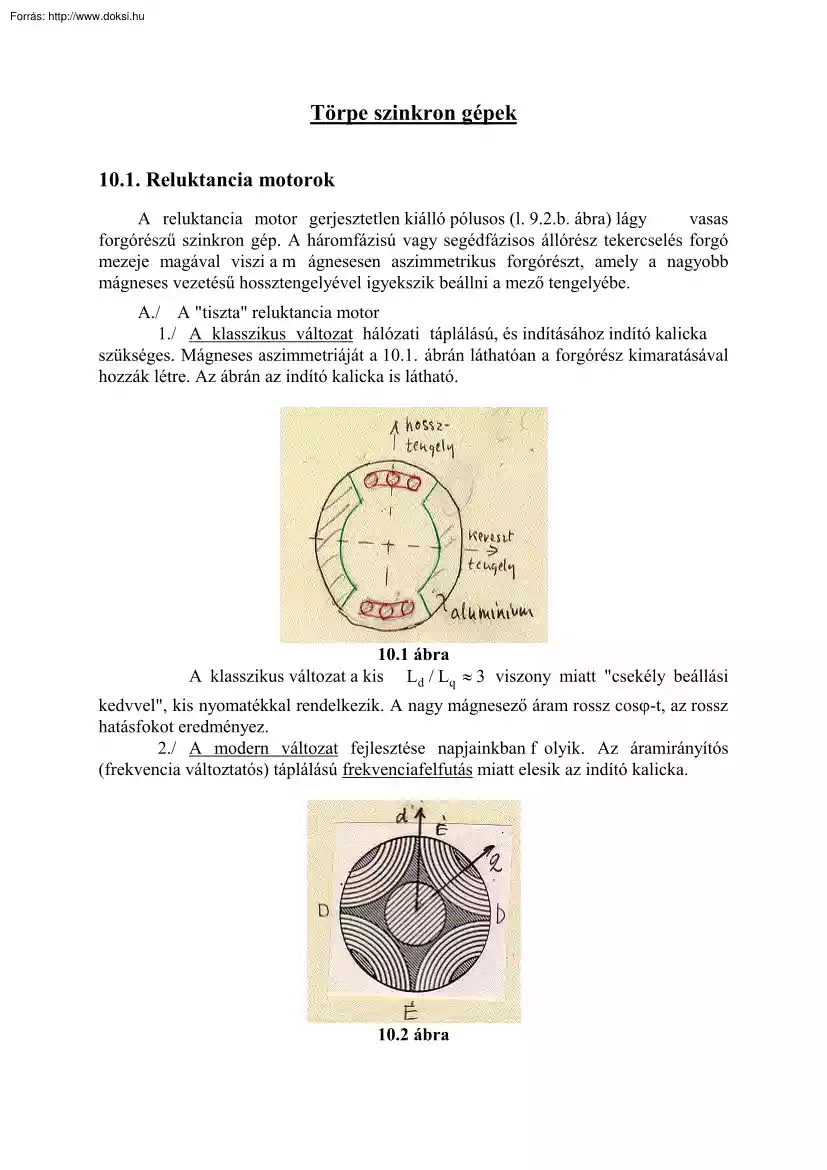
Törpe szinkron gépek 10.1 Reluktancia motorok A reluktancia motor gerjesztetlen kiálló pólusos (l. 92b ábra) lágy vasas forgórészű szinkron gép. A háromfázisú vagy segédfázisos állórész tekercselés forgó mezeje magával viszi a m ágnesesen aszimmetrikus forgórészt, amely a nagyobb mágneses vezetésű hossztengelyével igyekszik beállni a mező tengelyébe. A./ A "tiszta" reluktancia motor 1./ A klasszikus változat hálózati táplálású, és indításához indító kalicka szükséges. Mágneses aszimmetriáját a 101 ábrán láthatóan a forgórész kimaratásával hozzák létre. Az ábrán az indító kalicka is látható 10.1 ábra A klasszikus változat a kis Ld / Lq ≈ 3 viszony miatt "csekély beállási kedvvel", kis nyomatékkal rendelkezik. A nagy mágnesező áram rossz cosϕ-t, az rossz hatásfokot eredményez. 2./ A modern változat fejlesztése napjainkban f olyik Az áramirányítós (frekvencia változtatós)
táplálású frekvenciafelfutás miatt elesik az indító kalicka. 10.2 ábra A 10.2 ábrán látható axiálisan lemezelt forgórésszel jelentősen meg lehet növelni az Ld / Lq viszonyt 7-10 (13) értékre, am inek következtében a gép tulajdonságai nagymértékben javulnak. A d irányú jó m ágneses vezetést, lemezirányban nagy permeabilitású egymástól szigetelt m eghajlított vaslemezkötegek biztosítják. A lemezek közötti m ágneses szigetelés eredm ényezi a q irány ú rossz mágneses vezetést. B./ Mágnessel segített - hibrid - forgórészű gép 10.3 ábra A 10.3 ábrán rajzolt forgórészű gép reluktancia nyomatékkal és a mágnes révén a (9-12a) szerinti " gerjesztési" nyomatékkal rendelkezik, ahol U p helyébe a m ágnes mezeje által indukált feszültség lép. Érdekes megjegyezni, hogy miután a m ágnes anyagok permeabilitása közel a levegőével egyenlő a 10.3 ábrából láthatóan e gépeknél Lq > Ld 10.2 A
hiszterézis motor A reluktancia géphez hasonlóan az állórészen három fázisú vagy segédfázisos tekercselés van, amely forgó teret létesít. Ezt a 104a ábrán f orgó pólusokkal helyettesítve "képesítettük". A forgórészen az antim ágneses magon nagy hiszterézis hurokkal bíró (l. 104b ábra) gyűrű van 10.4 ábra A motor aszinkron gépként fut fel, miközben a mező a permanens mágneses gyűrűt - egyre csökkenő frekvenciával - folyamatosan átmágnesezi, majd szinkron állapotba kerül azáltal, hogy a forgórész mező megáll. 10.21 Az aszinkron nyomaték Az aszinkron ny omatékot és felfutást az aszinkron motor ismert elméletével követhetjük. A forgórészben az átmágnesezés révén keletkező hiszterézis veszteség, amely mindaddig megjelenik amíg a fordulatszám lemaradással átmágnesezés van a forgórész frekvenciával arányos, hiszen minden periódus egy hiszterézis hurok körülfutását jelenti. Tehát (10-1) Ph (
= Pt 2 ) = Kf2 = Ksf1 Feltesszük (átmenetileg), hogy más veszteség, így keletkezik a forgórészben, így a légrésteljesítmény Pl = örvényáram veszteség nem Ph = Kf1 = á ll. s (10-2) és a nyomaték M= Pl = Cf1 = á ll. Ω1 állandó. A K állandó nagyságát a hiszterézis görbe terület köbtartalma szolgáltatja. (10-3) és a m ágnesanyag 10.22 Az aszinkron felfutás Miután a nyomaték és a légrés teljesítmény állandó a mechanikai teljesítmény és a hiszterézis veszteség kifejezése Pm = (1 − s) Pl = (1 − s)Ω1M = ΩM (10-4) Ph = sPl = sΩ1M = (Ω1 − Ω) M (10-5) A nyomatékot és a m echanikai teljesítményt a 10.5a ábrán Pm és Ph változását a 10.5b ábrán látjuk 10.5 ábra 10.23 A szinkron üzem A forgórész anyaga már nem mágneseződik át, a rotor pólusok a felületen megálltak és a gép mint állandó mágneses forgórészű gép működik. A szinkron üzemmód nyomatéka azáltal változik, hogy a
forgórész gyűrű elemeinek inkrementális átmágnesezési kis hurokjai révén a teljes hiszterézis hurok összemegy ill. megnő A teljes nyomatékgörbét, a szinkron pont széthúzásával, a 10.6 ábrán látjuk Az örvényáramok nyomatéknövelő hatását az aszinkron felfutás alatt szaggatottan jelöltük. 10.6 ábra 10.3 Léptető motorok Mai fontosságuk forrása, hogy adott számú villamos impulzust pontosan ugyanannyi mechanikai szögelfordulássá, lépéssé, ily módon digitális jelet analóg jellé alakítanak. Felhasználásuk a szám ítástechnikában, fotó-, iroda-, szerszámgép technikában és másutt széleskörű. Az egyszerűség és olcsóság érdekében általában nyitott láncú vezérléssel működnek, bár újabban a zárt szabályozási lánc is terjed. A rendkívül széleskörű területen nagy vonásokban két fő kérdéscsoporttal foglalkozunk röviden, nevezetesen a léptető motorokkal kapcsolatos általános fogalmakkal és fő
típusaikkal. 10.31 Általános fogalmak A./ Alapgondolat A rendszerint 3, 4, 5 f ázisú állórész f ázistekercseit négyszögáramokkal - vagy kétirányú egyenáramú áramimpulzusokkal táplálják. A táplálási megoldásokkal nem foglalkozunk. 10.7 ábra A 10.7 ábrán négy fázisú gép elvét látjuk Az A fázis tranzisztorának bekapcsolásakor a forgórész az A fázistengelyhez odaforog. A-t kikapcsolva B-t be a forgórész 90°-ot forog, lép. Általában a motor tengelye a négyszögjelek ritmusára meghatározott szögelfordulást végez - lép. Alacsony frekvencián (108a ábra) ezek a lépések diszkrétek, bizonyos nagyság felett a mozgás már forgás (10.8b ábra) Megszüntetve a kapcsolgatást a tengely megáll, újra indítva továbblép. Az ε lépésszög általában ~0,915°(120°) A szerkezeti ábrákon nagyobbakat rajzolunk 10.8 ábra B./ Használatos fogalmak Lépésszög: Meg szokás különböztetni egész lépést, féllépést és mikrolépést,
amelyet egy teljes lépésből az áramimpulzus részekre bontásával nyerünk (l. később) A 10.9 ábra ily en áramalakot mutat A normál lépéshez <1000 lépés/ford tartozik, a mikrolépés esetén 8000-100.000 lépés/ford 10.9 ábra Az állandó f lépés frekvenciájú és a változó f rekvenciájú start-stop üzemet a 10.10a, b ábra mutatja 10.10 ábra A léptető motorok szinkron gépek így lengésre hajlamosak és túlterhelve kiesnek a szinkronizmusból. Néhány lépéshibát lépéstévesztésnek hívnak Fontos jellemzők az M(f) határgörbék. A léptető motorok terhelhetősége a lépésfrekvencia függvénye és az indulási ill. az üzemi tartományban egy-egy határgörbével jellemezhető. A 1011 ábrán az 1 jelű görbe alatt a gép - ha a terhelés inercia nulla - minden indulási és beállási parancsot lépéstévesztés nélkül teljesíteni tud. A 2 határgörbe alatti területen a forgó motor képes parancsokat követni, de itt nem
állítható le ill. nem reverzálható A szaggatott görbe az 1 jelű helyébe lép valamely adott de nem nulla értékű terhelési inercia esetén. 10.11 ábra 10.32 Fő típusok A használatos léptető motoroknak három alaptípusa van az állandó mágneses (aktív), a reluktancia (inaktív) és a kettő keveréke a hibrid. Mindegyik változatnál csak az alapgondolatot tudjuk bemutatni. Valamennyi típusnál az álló- és a forgórész is kiálló pólusú és ezek száma eltérő. Az állandó mágneses (forgórészű) léptetőmotor. 10.12 ábra A 10.12a ábra álló- és forgórészén egyaránt 2p= 2 pólusú, az állórészén m = 3 háromfázisú gépet mutat. Ha az a fázist tápláljuk (az ábrán csak az a fázis tekercseit rajzoltuk be) a mágnes beáll annak tengelyébe. A léptetést a b. ábra m utatja Az állórészen m 2p= 32= 6 kiálló pólus van így a lépésszög ε = 360 / 6 = 60° Az ábra a motor egész lépésszögű léptetését ábrázolja. Ha
az a és b fázisokat egyidejűleg tápláljuk akkor a forgórész féllépést, 30°-os lépést tenne. Ennek megfelelően különböző áramértékekkel lehet a mikrolépéseket (l 10.9ábra) kialakítani 2p=4 pólusú gépet építve 30°-os teljes lépést nyernénk A reluktancia léptetőmotornak két alapváltozata van az egytárcsás és a többtárcsás. Az egytárcsás gép elvi felépítése hasonló az állandó m ágneseséhez, de a forgórész lágyvas. Emiatt nincs tartónyomatéka A pólusok számának növelése költséges és helyigényes. Másik lehetőség a lépésszög csökkentésére az álló és forgórész fogazása. Számuk az állórészen és a forgórészen kevéssé eltérő, az eltérés gyakran a póluspárszámmal egyenlő. Az elgondolás elve a 10.13 ábrán látható, ahol a lépésszöget berajzoltuk 10.13 ábra A többtárcsás kivitelnél, pl. a háromfázisú esetben az előbbi egytárcsás változatból három van egy tengelyen egymás
mögött de a forgórész fogazatok el vannak forgatva egymáshoz képest. Az egyik fázist táplálva az első forgórész beáll. A következőt gerjesztve az elforgatásnak megfelelően a forgórész pl. 15°-ot lép Két fázis együttes táplálásával fél vagy nem egyforma áramokkal más lépés érhető el. A reluktancia típusnak nincs rögzítő nyomatéka. Az állandó mágneses gép sebessége - határfrekvenciája - a mágnes csillapító hatása miatt kisebb, em ellett lemágnesezési jelenségek és munkapont változások is felléphetnek. A hibrid gép - megfelelő konstrukció esetén - e hátrányokat kiküszöböli. A hibrid léptetőmotor esetében tengelyirányú mágnes mágnesezi a 10.14a ábra két forgórész pólusrendszerét, amelyek itt is el vannak forgatva egymáshoz képest. Az alapgondolatot a lépések létrejöttét a b. ábra szem lélteti Az ábra teljes 360/6=30°-os lépéseket mutat. Ha a két állórész fázist egyidejűleg tápláljuk akkor
15°os fellépést nyerünk A féllépéses üzemmódban egy fázist, majd két fázist, majd újra egy fázist kell táplálni. 10.14 ábra TARTALOMJEGYZÉK 10. Törpe szinkron gépek 1 10.1 Reluktancia motorok 1 10.2 A hiszterézis motor 3 10.21 Az aszinkron nyomaték 3 10.22 Az aszinkron felfutás 4 10.23 A szinkron üzem 4 10.3 Léptető motorok 5 10.31 Általános fogalmak 5 10.32 Fő típusok 7
táplálású frekvenciafelfutás miatt elesik az indító kalicka. 10.2 ábra A 10.2 ábrán látható axiálisan lemezelt forgórésszel jelentősen meg lehet növelni az Ld / Lq viszonyt 7-10 (13) értékre, am inek következtében a gép tulajdonságai nagymértékben javulnak. A d irányú jó m ágneses vezetést, lemezirányban nagy permeabilitású egymástól szigetelt m eghajlított vaslemezkötegek biztosítják. A lemezek közötti m ágneses szigetelés eredm ényezi a q irány ú rossz mágneses vezetést. B./ Mágnessel segített - hibrid - forgórészű gép 10.3 ábra A 10.3 ábrán rajzolt forgórészű gép reluktancia nyomatékkal és a mágnes révén a (9-12a) szerinti " gerjesztési" nyomatékkal rendelkezik, ahol U p helyébe a m ágnes mezeje által indukált feszültség lép. Érdekes megjegyezni, hogy miután a m ágnes anyagok permeabilitása közel a levegőével egyenlő a 10.3 ábrából láthatóan e gépeknél Lq > Ld 10.2 A
hiszterézis motor A reluktancia géphez hasonlóan az állórészen három fázisú vagy segédfázisos tekercselés van, amely forgó teret létesít. Ezt a 104a ábrán f orgó pólusokkal helyettesítve "képesítettük". A forgórészen az antim ágneses magon nagy hiszterézis hurokkal bíró (l. 104b ábra) gyűrű van 10.4 ábra A motor aszinkron gépként fut fel, miközben a mező a permanens mágneses gyűrűt - egyre csökkenő frekvenciával - folyamatosan átmágnesezi, majd szinkron állapotba kerül azáltal, hogy a forgórész mező megáll. 10.21 Az aszinkron nyomaték Az aszinkron ny omatékot és felfutást az aszinkron motor ismert elméletével követhetjük. A forgórészben az átmágnesezés révén keletkező hiszterézis veszteség, amely mindaddig megjelenik amíg a fordulatszám lemaradással átmágnesezés van a forgórész frekvenciával arányos, hiszen minden periódus egy hiszterézis hurok körülfutását jelenti. Tehát (10-1) Ph (
= Pt 2 ) = Kf2 = Ksf1 Feltesszük (átmenetileg), hogy más veszteség, így keletkezik a forgórészben, így a légrésteljesítmény Pl = örvényáram veszteség nem Ph = Kf1 = á ll. s (10-2) és a nyomaték M= Pl = Cf1 = á ll. Ω1 állandó. A K állandó nagyságát a hiszterézis görbe terület köbtartalma szolgáltatja. (10-3) és a m ágnesanyag 10.22 Az aszinkron felfutás Miután a nyomaték és a légrés teljesítmény állandó a mechanikai teljesítmény és a hiszterézis veszteség kifejezése Pm = (1 − s) Pl = (1 − s)Ω1M = ΩM (10-4) Ph = sPl = sΩ1M = (Ω1 − Ω) M (10-5) A nyomatékot és a m echanikai teljesítményt a 10.5a ábrán Pm és Ph változását a 10.5b ábrán látjuk 10.5 ábra 10.23 A szinkron üzem A forgórész anyaga már nem mágneseződik át, a rotor pólusok a felületen megálltak és a gép mint állandó mágneses forgórészű gép működik. A szinkron üzemmód nyomatéka azáltal változik, hogy a
forgórész gyűrű elemeinek inkrementális átmágnesezési kis hurokjai révén a teljes hiszterézis hurok összemegy ill. megnő A teljes nyomatékgörbét, a szinkron pont széthúzásával, a 10.6 ábrán látjuk Az örvényáramok nyomatéknövelő hatását az aszinkron felfutás alatt szaggatottan jelöltük. 10.6 ábra 10.3 Léptető motorok Mai fontosságuk forrása, hogy adott számú villamos impulzust pontosan ugyanannyi mechanikai szögelfordulássá, lépéssé, ily módon digitális jelet analóg jellé alakítanak. Felhasználásuk a szám ítástechnikában, fotó-, iroda-, szerszámgép technikában és másutt széleskörű. Az egyszerűség és olcsóság érdekében általában nyitott láncú vezérléssel működnek, bár újabban a zárt szabályozási lánc is terjed. A rendkívül széleskörű területen nagy vonásokban két fő kérdéscsoporttal foglalkozunk röviden, nevezetesen a léptető motorokkal kapcsolatos általános fogalmakkal és fő
típusaikkal. 10.31 Általános fogalmak A./ Alapgondolat A rendszerint 3, 4, 5 f ázisú állórész f ázistekercseit négyszögáramokkal - vagy kétirányú egyenáramú áramimpulzusokkal táplálják. A táplálási megoldásokkal nem foglalkozunk. 10.7 ábra A 10.7 ábrán négy fázisú gép elvét látjuk Az A fázis tranzisztorának bekapcsolásakor a forgórész az A fázistengelyhez odaforog. A-t kikapcsolva B-t be a forgórész 90°-ot forog, lép. Általában a motor tengelye a négyszögjelek ritmusára meghatározott szögelfordulást végez - lép. Alacsony frekvencián (108a ábra) ezek a lépések diszkrétek, bizonyos nagyság felett a mozgás már forgás (10.8b ábra) Megszüntetve a kapcsolgatást a tengely megáll, újra indítva továbblép. Az ε lépésszög általában ~0,915°(120°) A szerkezeti ábrákon nagyobbakat rajzolunk 10.8 ábra B./ Használatos fogalmak Lépésszög: Meg szokás különböztetni egész lépést, féllépést és mikrolépést,
amelyet egy teljes lépésből az áramimpulzus részekre bontásával nyerünk (l. később) A 10.9 ábra ily en áramalakot mutat A normál lépéshez <1000 lépés/ford tartozik, a mikrolépés esetén 8000-100.000 lépés/ford 10.9 ábra Az állandó f lépés frekvenciájú és a változó f rekvenciájú start-stop üzemet a 10.10a, b ábra mutatja 10.10 ábra A léptető motorok szinkron gépek így lengésre hajlamosak és túlterhelve kiesnek a szinkronizmusból. Néhány lépéshibát lépéstévesztésnek hívnak Fontos jellemzők az M(f) határgörbék. A léptető motorok terhelhetősége a lépésfrekvencia függvénye és az indulási ill. az üzemi tartományban egy-egy határgörbével jellemezhető. A 1011 ábrán az 1 jelű görbe alatt a gép - ha a terhelés inercia nulla - minden indulási és beállási parancsot lépéstévesztés nélkül teljesíteni tud. A 2 határgörbe alatti területen a forgó motor képes parancsokat követni, de itt nem
állítható le ill. nem reverzálható A szaggatott görbe az 1 jelű helyébe lép valamely adott de nem nulla értékű terhelési inercia esetén. 10.11 ábra 10.32 Fő típusok A használatos léptető motoroknak három alaptípusa van az állandó mágneses (aktív), a reluktancia (inaktív) és a kettő keveréke a hibrid. Mindegyik változatnál csak az alapgondolatot tudjuk bemutatni. Valamennyi típusnál az álló- és a forgórész is kiálló pólusú és ezek száma eltérő. Az állandó mágneses (forgórészű) léptetőmotor. 10.12 ábra A 10.12a ábra álló- és forgórészén egyaránt 2p= 2 pólusú, az állórészén m = 3 háromfázisú gépet mutat. Ha az a fázist tápláljuk (az ábrán csak az a fázis tekercseit rajzoltuk be) a mágnes beáll annak tengelyébe. A léptetést a b. ábra m utatja Az állórészen m 2p= 32= 6 kiálló pólus van így a lépésszög ε = 360 / 6 = 60° Az ábra a motor egész lépésszögű léptetését ábrázolja. Ha
az a és b fázisokat egyidejűleg tápláljuk akkor a forgórész féllépést, 30°-os lépést tenne. Ennek megfelelően különböző áramértékekkel lehet a mikrolépéseket (l 10.9ábra) kialakítani 2p=4 pólusú gépet építve 30°-os teljes lépést nyernénk A reluktancia léptetőmotornak két alapváltozata van az egytárcsás és a többtárcsás. Az egytárcsás gép elvi felépítése hasonló az állandó m ágneseséhez, de a forgórész lágyvas. Emiatt nincs tartónyomatéka A pólusok számának növelése költséges és helyigényes. Másik lehetőség a lépésszög csökkentésére az álló és forgórész fogazása. Számuk az állórészen és a forgórészen kevéssé eltérő, az eltérés gyakran a póluspárszámmal egyenlő. Az elgondolás elve a 10.13 ábrán látható, ahol a lépésszöget berajzoltuk 10.13 ábra A többtárcsás kivitelnél, pl. a háromfázisú esetben az előbbi egytárcsás változatból három van egy tengelyen egymás
mögött de a forgórész fogazatok el vannak forgatva egymáshoz képest. Az egyik fázist táplálva az első forgórész beáll. A következőt gerjesztve az elforgatásnak megfelelően a forgórész pl. 15°-ot lép Két fázis együttes táplálásával fél vagy nem egyforma áramokkal más lépés érhető el. A reluktancia típusnak nincs rögzítő nyomatéka. Az állandó mágneses gép sebessége - határfrekvenciája - a mágnes csillapító hatása miatt kisebb, em ellett lemágnesezési jelenségek és munkapont változások is felléphetnek. A hibrid gép - megfelelő konstrukció esetén - e hátrányokat kiküszöböli. A hibrid léptetőmotor esetében tengelyirányú mágnes mágnesezi a 10.14a ábra két forgórész pólusrendszerét, amelyek itt is el vannak forgatva egymáshoz képest. Az alapgondolatot a lépések létrejöttét a b. ábra szem lélteti Az ábra teljes 360/6=30°-os lépéseket mutat. Ha a két állórész fázist egyidejűleg tápláljuk akkor
15°os fellépést nyerünk A féllépéses üzemmódban egy fázist, majd két fázist, majd újra egy fázist kell táplálni. 10.14 ábra TARTALOMJEGYZÉK 10. Törpe szinkron gépek 1 10.1 Reluktancia motorok 1 10.2 A hiszterézis motor 3 10.21 Az aszinkron nyomaték 3 10.22 Az aszinkron felfutás 4 10.23 A szinkron üzem 4 10.3 Léptető motorok 5 10.31 Általános fogalmak 5 10.32 Fő típusok 7
 Augusto Pinochet Ugarte néven, 1915. november 25-én született a chilei Valparaísoban. [1]A valparaísói San Rafael Papneveldében, a Quillota Iskolában, illetve a Ferences Atyák Valparaísói Iskolájában is folytatott tanulmányokat. 1933-ban iratkozott be egy katonai iskolába, amelynek elvégzése után hadnagyi ranggal került a gyalogsághoz. [1]A következő években a folyamatos
Augusto Pinochet Ugarte néven, 1915. november 25-én született a chilei Valparaísoban. [1]A valparaísói San Rafael Papneveldében, a Quillota Iskolában, illetve a Ferences Atyák Valparaísói Iskolájában is folytatott tanulmányokat. 1933-ban iratkozott be egy katonai iskolába, amelynek elvégzése után hadnagyi ranggal került a gyalogsághoz. [1]A következő években a folyamatos