Alapadatok
Év, oldalszám:2003, 16 oldal
Nyelv:magyar
Letöltések száma:141
Feltöltve:2009. május 07.
Méret:427 KB
Intézmény:
-
Megjegyzés:
Csatolmány:-
Letöltés PDF-ben:Kérlek jelentkezz be!
Értékelések
| MarkTH14 | 2020. november 25. | |
|---|---|---|
| Tök jó, csak ki a szerző?
Sajnos nem tudjuk, de amint kiderül, feltüntetjük. (a szerk.) |
||
Mit olvastak a többiek, ha ezzel végeztek?





Tartalmi kivonat
GPS és GNSS alkalmazása a helymeghatározásban és a térinfomatikában A fejezet a különböző típusú műholdas helymeghatározó rendszerekről, ezen belül részletesebben az amerikai GPS-ről, a műholdas helymeghatározás során fellépő távolság- és időmérési problémák matematikai és fizikai alapjairól, a gyakorlatban alkalmazott mérési módszerekről és a vevőkészülékek típusairól, valamint a műholdas helymeghatározás közeljövőben várható fejlődési irányairól és a mobil térinformatikai alkalmazási lehetőségekről ad összefoglaló áttekintést. 1. Az alapötlet 1.1 Rádiónavigáció A múlt század közepén fejlesztették ki a rádiójelek terjedési idejének mérésén alapuló távolságmérési technikát. Az alapötlet szerint, ha egy adóállomásról kisugárzott és egy vevőberendezéshez beérkezett rádiójel haladási idejét ismerjük, akkor az adó és a vevő közötti távolságot is meg tudjuk határozni, mert a
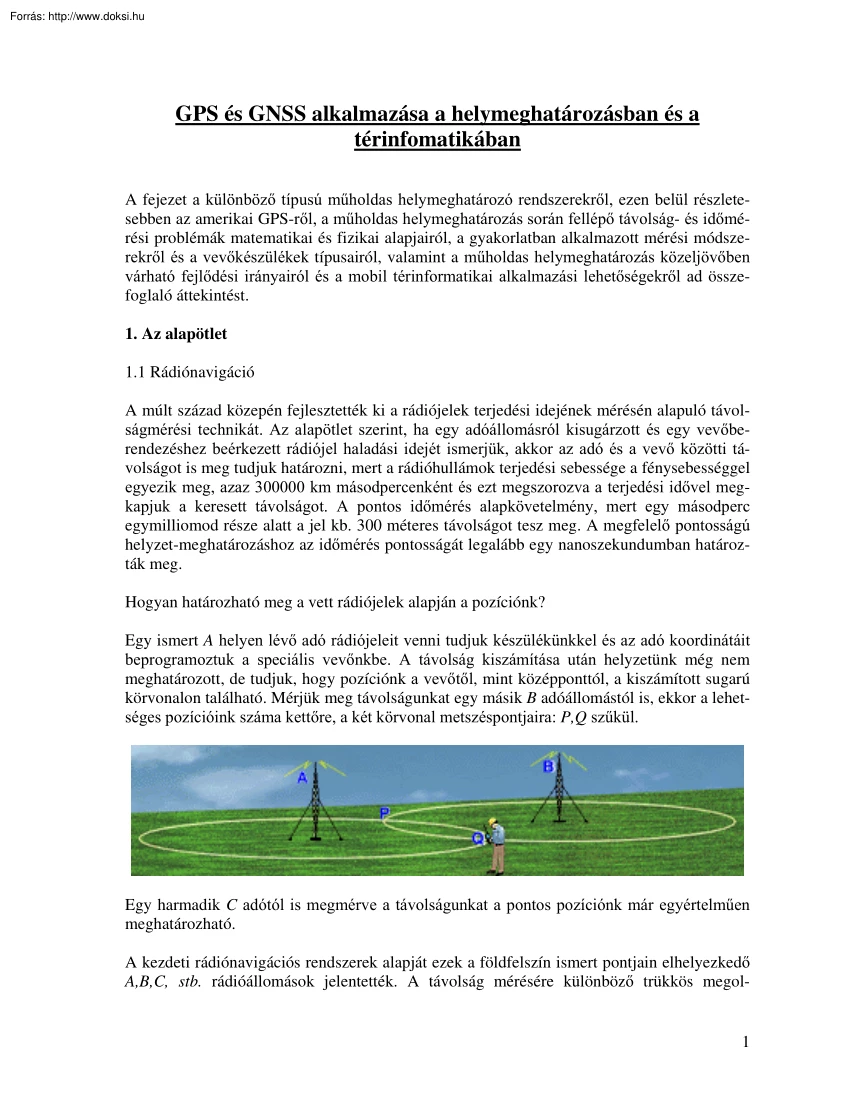
rádióhullámok terjedési sebessége a fénysebességgel egyezik meg, azaz 300000 km másodpercenként és ezt megszorozva a terjedési idővel megkapjuk a keresett távolságot. A pontos időmérés alapkövetelmény, mert egy másodperc egymilliomod része alatt a jel kb. 300 méteres távolságot tesz meg A megfelelő pontosságú helyzet-meghatározáshoz az időmérés pontosságát legalább egy nanoszekundumban határozták meg. Hogyan határozható meg a vett rádiójelek alapján a pozíciónk? Egy ismert A helyen lévő adó rádiójeleit venni tudjuk készülékünkkel és az adó koordinátáit beprogramoztuk a speciális vevőnkbe. A távolság kiszámítása után helyzetünk még nem meghatározott, de tudjuk, hogy pozíciónk a vevőtől, mint középponttól, a kiszámított sugarú körvonalon található. Mérjük meg távolságunkat egy másik B adóállomástól is, ekkor a lehetséges pozícióink száma kettőre, a két körvonal metszéspontjaira: P,Q szűkül
Egy harmadik C adótól is megmérve a távolságunkat a pontos pozíciónk már egyértelműen meghatározható. A kezdeti rádiónavigációs rendszerek alapját ezek a földfelszín ismert pontjain elhelyezkedő A,B,C, stb. rádióállomások jelentették A távolság mérésére különböző trükkös megol- 1 dásokat dolgoztak ki a késleltetési idők és fázisszögek kimérésével (pl. a LORAN 1 rendszerben) De a földi irányadókra épülő rendszerek mindegyikének közös problémája, hogy a rádióadók vételi körzete és vételi lehetőségei korlátozottak, esetlegesek és lényegében az adók és a meghatározandó pont közel azonos síkban való elhelyezkedését vették alapul. (Egy adótól 4 kilométerre 3000 méter magasságban szálló repülőn ugyanazt az adatot mérjük, mint az adóval azonos tengerszint feletti magasságon, 5 kilométerre levő járművön.) Ez a hajózásban még elmegy, de a repülésben már nem. 1.2 Műholdas navigáció Az
előbbiekben említett problémák (korlátozott lefedettség, csak vízszintes pozíció) megoldására a rádióadókat műholdakra telepítették, amelyek kellően nagy magasságú pályáikról biztosítják a globális lefedettséget, vagyis a Föld bármely pontján megfelelő számú műholdjel vételét. A rendszer alapelve megegyezik a földi rádiónavigációs rendszer elvével, a különbségek a következőkben foglalhatók össze: • képes háromdimenziós helymeghatározásra, • a műholdak helyzete folyamatosan változik (nem állandó, mint a földi rádióadóknál), pillanatnyi pozíciójuk ismeretének pontossága befolyásolja a meghatározni kívánt helyzet pontosságát. Az első műholdas rendszerek egyike a Transit 2 volt, melynek fejlesztése és kiépítése során szerzett tapasztalatok nagyban hozzájárultak a manapság is használatos helymeghatározó rendszerek (GPS, GLONASS) születéséhez és működéséhez. 2. Műholdas helymeghatározó
rendszerek 2.1 Az orosz GLONASS Az első GLONASS (GLObal NAvigation Satellite System) műholdat 1982 októberében lőtték fel. A teljes kiépítésben a 24 darab GLONASS műhold 19 100 km-es magasságban, közel kör alakú pályán kering három pályasíkban (inklinációja 64.8º), melyek 120º-os szöget zárnak be egymással A pályánként 8 műhold egyenlő távolságra van egymástól, egy teljes pálya megtétele kb 11 óra 15 percig tart A műholdak pályáját úgy tervezték meg, hogy egyszerre legalább 5 holdat lásson a felhasználó 1 LORAN (LOng RAnge Navigation): 1950-es években kiépített rádiónavigációs rendszer. A rendszer minden láncszeme legalább négy adóból áll, kb. 800 km-es útvonalat fed le és a láncszemek hálózata alkotja a teljes rendszert, pl. az USA nyugati partján a navigációt két láncszemmel biztosították Nem globális rendszer, csak a földfelszín 5 %-án tette lehetővé a navigációt. Pontossága kb 250 méter 2 Az USA
Haditengerészete számára 1961-ben fejlesztették ki, polgári felhasználása 1967-ben kezdődött, és 1994-ben a rendszer működésével együtt fejeződött be. Alapvető célja a tengerészeti navigáció volt, de hasznosították geodéziai célokra is, amelyet hosszú észlelési idő, utófeldolgozás és viszonylag alacsony, 1 méter körüli pontosságok jellemeztek. A mérés alapelve az volt, hogy a vevő a földi pont és a műhold távolságának megváltozását határozta meg egy megadott időintervallumra a Doppler-elv alapján 2 A rendszer műholdjai két jelet sugároznak folyamatosan: a SP szabványos pontosságú jel (57-70 m pontosság), a HP katonai jel pedig nagy pontosságú. A polgári felhasználók számára csak az SP hozzáférés engedélyezett, ezt azonban nem rontják el mesterségesen 2006 novemberben 16 pályán lévő műhold közül 11 működött rendszeresen, így a rendszer helymeghatározási feladatokra már alkalmazható és a
kombinált GPS/GLONASS vevők is megjelentek és elterjedőben vannak. További információk: http://wwwglonass-iancrsaru/ 2.2 Az amerikai (USA) GPS A NAVSTAR (Navigation System with Timing and Ranging) GPS fejlesztését az Egyesült Államok Védelmi Minisztériuma (DoD) kezdeményezte 1972-ben. Létrehozása elsősorban katonai célokból történt, de a polgári hasznosítását is lehetővé tették. A rendszer alkotóelemeit a következő pontokban tekintjük át 2.21 A műholdak A műholdpályák helyzete, a műholdak száma és elhelyezkedése azt biztosítja, hogy a Földfelszín bármely pontján, tetszőleges időpontban egyszerre legalább négy műhold legyen észlelésre alkalmas helyzetben, legalább 15°-kal a horizont felett. Jelenleg (2006 novemberben) a rendszer 30 műholdjából 29 aktív, amelyek hat különböző – az Egyenlítővel 55º-os szöget bezáró - pályán helyezkednek el. Mind a hat pályán legalább 4 műhold és további tartalék műholdak
keringenek 20200 km magasan, közel kör alakú pályán, 11 óra 58 perces keringési 3 idővel. A közel 750 kg tömegű műholdakon rádió adó-vevő készülék, atomóra (cézium, rubidium) található és a működéshez szükséges energiát napelemek biztosítják. A műhold rádióüzenete egyrészt lehetővé teszi a földi ponton a műhold-vevő távolság meghatározását, másrészt információt ad a műhold pontos térbeli helyzetéről. A műholdak által sugárzott navigációs üzenetek a pályaadatok és –korrekciók, valamint az óraparaméterek mellett a műholdakra vonatkozó státusz-információt (on/off) és ionoszféraparamétereket is tartalmaznak. Az ionoszféra jelkésleltető hatása súlyos hibával terhelné a mérés eredményét. A közelítő pálya- és óraadatokat tartalmazó információkat, a legalább 6 naponként frissített almanach üzenetekben kapják meg a felhasználók, amelyeket többek között a méréstervezéshez
használhatnak föl. 2.22 Földi monitor állomások Az ismert WGS-84 koordinátájú földi követő állomások a helymeghatározási feladat fordítottját oldják meg: ismert helyzetvektorok sorozatából pályaadatokat számítanak. Egyszerre kezdetben öt állomás mért, manapság már tucatnyi a monitor állomások száma. A műholdakra vonatkozó adatokat a vezérlő központban (Colorado Springs, USA) értékelik, meghatározzák a pálya- és időkorrekciókat, majd az adatokat a műholdak fedélzeti számítógépének memóriájába juttatják 2.23 Felhasználók A világszerte működő több tízmillió GPS vevőberendezés antenna-egységből és jelfeldolgozó-egységből áll. Az antenna-egység feladata az észlelési programban kiválasztott műholdak összetett jelének vétele. A jelfeldolgozó-egység legfontosabb része navigációs célú készülék esetében a gyors működésű számítógép, helymeghatározásra szolgáló mozdulatlan vevőkészülék
esetében a nagy kapacitású adattároló. A korszerű vevők többcsatornásak, azaz egy időben több – általában 8-14 – műhold jelének vételére alkalmasak. Leggyakrabban alkalmazott csoportosításuk szerint megkülönböztethetünk: navigációs (kb. 15-20 m-es pontosság), térinformatikai (méteres-szubméteres pontosság), valamint geodéziai (cm-es pontosság) vevőket, amelyeket hosszú mérési idővel (12-24 óra) és tudományos feldolgozással geodinamikai (pl. kőzetlemezek mozgása, izosztázia) célra, mm-es mozgások meghatározására is alkalmaznak. További információk pl: http://tycho.usnonavymil/gpshtml http://www.ngsnoaagov/GPS/GPShtml 3. Hogy működik a GPS? A helymeghatározás geometriai alapelve a térbeli ívmetszés feladata: ha feltesszük, hogy az ismeretlen helyzetű pont a földfelszín közelében helyezkedik el és ismerjük három műholdtól mért távolságát, akkor a három gömbfelület két pontban metszi egymást. A két
megoldás közül egyszerűen kizárható az a pont, amelyik a valahol a világűrben helyezkedik el Az egyértelmű megoldást egy negyedik műholdtól mért távolság szolgáltatja, de a gyakorlatban több, 4 akár tíz műhold is részt vesz a helyzetmeghatározásban, a megoldást az összes mérés alapján kiegyenlítéssel kapjuk. 3.1 Távolságmérés A vevő és a műhold közötti távolság d (m) meghatározása közvetett módon, időmérésre viszszavezetve történik. A rádióhullámok terjedési idejének t (s) és a rádióhullám terjedési sebességének - a fénysebességnek – ismeretében: d (m) = t(s) x 3x108 (m/s) 3.2 Időmérés A jel terjedési idejének mérését, amely kb. 0,06 mp-nyi időtartam megmérését jelenti, a következőképpen valósították meg a helymeghatározó rendszerekben: a műholdon és a vevőben is egy-egy órát helyeztek el. Az órák kb egy ezredmásodpercenként ugyanazt a – műholdanként különböző, közel
véletlenszerű - kódsorozatot generálják A műhold jele a vevőhöz a közöttük lévő távolság megtételéhez szükséges idővel később érkezik. A vevő összeveti (elcsúsztatja) a saját jelsorozatát a műholdról érkezett jelsorozattal és a különbség éppen a késési időt adja meg, ha mindkét óra tökéletesen szinkronizált és pontos 5 Azonban a nagypontosságú időmérés (rubidium és cézium atomórákkal) csak a műholdakon oldható meg, míg a vevőkben egyszerű kvarcórákat helyeznek el. A pontatlan időmérés viszont minden egyidejű észlelést azonos hibával terhel, így egy negyedik műholdtól való mérésből az órahiba (dt) számítható Az alábbi ábrán a síkbeli helyzet látható, térben négy mérés szükséges az órahiba meghatározásához és az egyértelmű geometriai megoldáshoz: A fentiekből következik, hogy a vevőknek legalább négycsatornásnak kell lenniük. A gyakorlati számításokban a meghatározandó
pont 3 térbeli koordinátáját és a vevő órahibáját is ismeretlennek tekintve, a négy műholdra történő mérésből származó 4 egyenletből a feladat egyértelmű megoldását kapjuk. A helymeghatározás egyenletrendszere tehát a következő alakú: s = 1.n Prs = ( X s − X r ) 2 + (Y s − Yr ) 2 + ( Z s − Z r ) 2 + Cr ahol Xs, Ys, Zs Prs Xr, Yr, Zr Cr n az s jelű műhold ismert térbeli derékszögű koordinátái az s jelű műholdra az r jelű vevővel mért és javított kódtávolság az r jelű vevő ismeretlen térbeli derékszögű koordinátái a vevő óraigazítatlanságának hatása távolságegységben az észlelt műholdak száma 3.3 Kódmérés A GPS műholdak két jelet sugároznak: L1=1575,42 MHz és a L2=1227,60 MHz vivőhullám hosszakon. Az L1 és L2 frekvenciát a nagyobb mérési pontosságot biztosító P (precision) korlátozott hozzáférésű kóddal modulálják, amelynek hullámhossza 30 m és csak az arra jogosult, elsősorban katonai
felhasználók használhatják. Az L1 frekvenciát a szabad elérésű 6 C/A (coarse/acquisition - durva/elérés) kóddal modulálják, amely 300 m hosszú és kisebb mérési pontosságot tesz lehetővé. A C/A kód véletlen kód, zérusokból és egyesekből áll. Egy elem frekvenciája υ=1,023 MHz, a kód 1023 bit hosszú. Időben kifejezve egy elem 1 mikroszekundumnak (0,000001 mp-nek) felel meg, a teljes kód 1 milliszekundumnak (0,001 mp-nek) felel meg, így: • egy elem hossza: λ=c/υ=2,99792458*1080,97751710610-6=293,052 [m], • az egész kódsorozat hossza: 293,052*1023 = 299792,458 [m]. A jobb minőségű vevők mérési pontossága a kódelem (~300 m) 1 %-ára tehető, így ennél a mérési módszernél megközelítőleg 3 méteres mérési zajra számíthatunk. 3.4 Vivőfázis mérése A vivőjel frekvenciája (L1 : 19,05 cm; L2 : 24,45 cm) kb. 1000-szerese a kódfrekvenciának, így ennél a mérési módszernél a pontosság növekedése is 1000-szeres a
kódméréssel összehasonlítva, vagyis a jelkiértékelés mm-es pontossággal végezhető el (1 %-os mérési zajjal számolva). Problémaként jelentkezik a módszernél, hogy az egész periódusok száma nem ismert (fázis többértelműség). A probléma megoldására matematikai modelleket, illetve kétfrekvenciás vevőket alkalmaznak 3.3 Hibaforrások A GPS műholdak helyzetét, vagyis X,Y,Z geocentrikus koordinátáit ismernünk kell a helymeghatározáshoz. A műholdak a kódsorozatok mellett közlik a navigációs üzeneteikben az aktuális pályaadatokat, az efemeridákat. A földi vezérlőállomások meghatározott időközönként frissítik, javítják az adatokat és visszajuttatják azt a műholdakra A műholdak pozíciójának hibáját kerethibának nevezik a geodéziában Legjelentősebb hibaforrásként a földi légkörnek a GPS jelre gyakorolt késleltető hatását említhetjük. A terjedés sebességére az egyenletes fénysebesség csak vákuumban igaz, az
ionoszférában és troposzférában az elektromágneses sugárzás késleltetést szenved, amelynek a távolságmérésre gyakorolt hatása több tízméteres nagyságrendű is lehet. Kiküszöbölésére modellezést, illetve kétfrekvenciás mérésre alkalmas (drágább) készülékeket használnak, mivel a hatás frekvenciafüggő. További hibajelenségként értelmezhető a többutas terjedés (multipath) problémája, amely akkor jelentkezik, ha a műhold jele nem közvetlenül, hanem valamely közeli visszaverő felületről közvetetten érkezik a vevőhöz. Ez a jelenség a nagyobb pontosságú méréseket érinti és különböző típusú, speciális antennákkal küszöbölik ki a jelenséget. A műholdgeometria is hatással van a mérés pontosságára. A műholdak elhelyezkedése az égbolton jelentősen befolyásolhatja a mérést. Ideális a helyzet, ha az égbolton minden irányban egyenletesen találhatók műholdak, míg romlik a geometria, ha a holdak egymáshoz
közel, „egy csomóban” helyezkednek el. Ezt a hatást fejezi ki a DOP (Dilution of Precision) érték 7 A kisebb DOP érték nagyobb mérési pontosságot tesz lehetővé, ideálisan pl. a GDOP értékének 2-4 között kell lennie Az eredeti katonai célokkal összhangban a DoD a szelektív elérhetőség (selective availability, röviden SA) politikáját gyakorolja, ami azt jelenti, hogy esetenként (pld. az öbölháború idején) korlátozza a teljes rendszer használatát a polgári alkalmazóknak. Gyakorlatilag ez korábban úgy történt, hogy csonkolták azokat az üzeneteket, melyek a műhold koordinátáit továbbítják a vevőknek. A C/A kódra műholdanként változó, alacsony frekvenciás (hosszú idő alatt ismétlődő) torzítást vittek, mely az eredeti 30 m-es pontosságot 100 méter körülire csökkentette A SA-et 2000 május 1-től Clinton elnök megszűntette Az abszolút meghatározást terhelő hibahatások (HDOP=2; VDOP=2,5) Hibaforrás műhold
pálya műhold óra ionoszféra troposzféra többutas terjedés vevő zaja URE (felhasználó távolsághibája) vízszintes helyzethiba (HDOP*URE) magassághiba (VDOP*URE) Távolsághiba (m) 2,3 2,1 4 1,4 1,4 0,5 5,1 10,2 12,8 4. Mérési technikák, a vevők típusai Abszolút és relatív helymeghatározás: 1. Abszolút (navigációs) mérés: egyetlen vevővel végezzük, eredménye lehet XYZ térbeli derékszögű koordináták, vagy λϕ földrajzi koordináták (pl. WGS-84) A mérés hibája névlegesen 15-20 méter, de manapság, mérési tapasztalataink szerint, már néhány méteres pontosságú navigációs mérés is lehetséges. 2. Relatív helymeghatározás: két vevővel, egyidejű méréssel történik, az egyik vevőt, amelyhez viszonyítunk, referencia-állomásnak nevezzük. A mérés a két pont közötti relatív térbeli távolság Δx, Δy, Δz összetevőit adja meg A geodéziai pontossághoz relatív módszerrel fázismérést kell végeznünk A
kiértékelés típusai: 1. Valós idejű (real time): relatív méréskor a valós pozíciónkat nagyon kis időkülönbséggel a helyszínen kapjuk meg 2. Utófeldolgozással (post processing): két vevővel történő mérésnél a pontos pozíciót utólagos adatfeldolgozás során határozzuk meg Statikus, kinematikus helymeghatározás: 1. Statikus mérés: mérés közben mozdulatlan vevőkkel történik 2. Kinematikus mérés: mozgó vevővel (rover) mérünk, míg a referenciavevő (bázis) ismert ponton áll. 4.1 Navigációs mérés 8 A pillanatnyi helyzet meghatározására szolgál, funkció lehetnek pl. célpont felkeresése, bejárt útvonal rögzítése, stb Jellemzői: • vízszintes pontosság: névlegesen 15-20 m, de lehet néhány méteres is, • magasságmérés pontossága: bizonytalan, javítás: pl. barométer + kalibrálás, • kijelzés: általában földrajzi, de lehet EOV is. 4.2 Differenciális GPS (DGPS) Valós idejű, relatív, kódmérést
jelent. Két vevővel történik: • referencia-állomás (bázis) korrekciós adatokat szolgáltat (50 km-es körzetben), • mozgó (rover) vevő a korrekciós adatokkal javítja saját méréseit, • pontossága jellemzően méteres, szubméteres. 4.3 Statikus GPS mérés Mozdulatlan vevők közötti térbeli vektorok meghatározása szolgál, fázisméréssel. A térbeli vektorokból a térbeli hálózat kiegyenlíthető (fix pontokra). Több 10 km-es, de akár több 1000 km-es vektorok mérhetők cm pontossággal, de minél nagyobb a vektor, annál hosszabb mérési idő (atmoszférikus hatások kiküszöbölésére) és speciálisabb vevő és feldolgozó program szükséges. A méréshez szükséges időtartam kb 30-50 perc, amely a vevőtől és a DOP értékétől függ. 4.31 Gyors statikus (rapid static) Általában 15 km-nél rövidebb vektorok meghatározására szolgál. A mérési idő rövidebb, mint a statikus mérésnél (10-30 perc), de a pontosság és a mérés
megbízhatósága valamelyest romlik. A mérési idő azonban egyre rövidül a rendszerek és a feldolgozó szoftverek fejlődésével 4.4 Kinematikus GPS mérés Ennél a mérési módszernél egy ismert ponton elhelyezett vevőhöz képest mérjük a pozíciót. Két típusa: • Folyamatos: mozgó vevő (jármű) útvonalát rögzítjük fázisméréssel, és • Stop and Go: terepen kijelölt pontokon rövid ideig (néhány epocha) mérünk. Jellemzői: • folyamatos jelvétel szükséges, • statikus inicializálás (periódusszám felvétele) szükséges az első ponton, • korszerű megoldás: menet közbeni inicializálás (OTF), szakadások megengedettek a jelvételben (zavaró tereptárgyak), • referenciaállomás max. 10-15 km-re lehet, • feldolgozás: utólagos. 9 4.5 Valós idejű kinematikus (RTK) mérés Geodéziai pontosságú terepi munkákhoz: felméréshez, pontkitűzéshez használatos módszerek. Jellemzői: • technika: megegyezik a kinematikus
mérésével, • feldolgozás: egyidejűleg a méréssel (real time), • referencia-adatokat rádión, vagy mobil GPRS technológiával közvetítik a mozgó vevőhöz, • mérés jósága azonnal ellenőrizhető, • hatótávolság: 5-10 km, de ez a GNSS rendszerek kiépülésével folyamatosan növekszik • legmagasabb készülékárak, • rádiófrekvencia használatához engedély szükséges. 5. Merre tart a műholdas helymeghatározás? 5.1 Az európai GALILEO Az Európa Tanács 2002-ben Madridban határozott a GALILEO rendszer kiépítéséről, és 2008-2010-re tervezik a teljes rendszer beindítását, 2006 őszén egy műhold tesztüzemmódban sugárzott adatokat. Tisztán európai és polgári felhasználású, a hely-, idő- és sebesség-meghatározást fogja segíteni. Jellemzői: • 3 pályán, pályánként 7 aktív és 3 tartalék műholdból áll, • jobb észlelhetőség az északi országokban és szűk, magas épületekkel határolt utcákban, • európai
vezérlő központokból irányítva gyors pályamódosításokra lesz lehetőség, • a jelenlegi GPS-nél nagyobb pontosságú és megbízhatóbb, • mindenki számára elérhető, ingyenes szolgáltatás, • speciális komponensek, pl. földi kiegészítő integrált hálózatok, használhatóság parkolóházakban és egyéb épületekben, fedett helyeken, • olcsó, többfunkciós vevőkészülékek. További információk: http://galileo.ihmhu/ 5.2 Az integrált GNSS A GNSS (Global Navigation Satellite System) integrált földi helymeghatározó rendszer, melynek alkotóelemei a már meglévő amerikai GPS, az orosz GLONASS és a tervezett európai GALILEO, valamint ezek geoszinkron műholdas (SBAS, pl. EGNOS, WAAS, OmniStar) és földi (GBAS, pl. német SAPOS, kelet-európai EUPOS) kiegészítő rendszerei A polgári felhasználók számára a legtöbb alkalmazási területen nagyobb pontosságot, magasabb integritási szintet (a rendszer működési problémáiról közel
valósidejű figyelmeztetés a navigációs felhasználók felé) tesz lehetővé. További információk: http://www.geoinfohu/geo/geodezia/3dgeodhtm 10 http://www.gpsmagazinhu/doc/GPS rendszerekdoc 5.3 A magyarországi GNSS-infrastruktúra Az első lépésben az 1990-es években hazánkban kiépült az ún. „passzív” GPS-hálózat, az OGPSH, amely megfelelő sűrűségű (10 km-es) referenciarendszert biztosít a relatív helymeghatározáshoz. A hálózat pontjai bázispontokként szolgálnak a geodéziai GPSmérésekhez Az infrastruktúra kiépítésének második generációs eleme az előre telepített permanens bázisállomások „aktív” rendszere, amely lehetővé teszi, hogy a felhasználó a mérés helyéhez legközelebbi, folyamatosan működő bázisállomás adatait felhasználva, egy mozgó vevővel utólagos feldolgozással relatív helymeghatározást végezzen. Előnye a gazdaságosság (idő- és költségmegtakarítás, mivel csak egy vevőre van
szükség) és a garantáltan hibátlan referenciaadatokkal elért pontosság és megbízhatóság. Jelenleg – 2006 őszén – a GPS hálózatnak 17 működő és további 6, közvetlenül üzembe helyezés előtt álló állomása van. A harmadik lépésben a valós idejű, geodéziai pontosságú adatszolgáltatás épül ki az ország teljes területére, amely hálózatával kapcsolódik a szomszédos országok rendszereihez is (EUPOS). A valós idejű korrekciókat, a már üzemelő állomások 30-35 km-es körzetében lehet biztonsággal használni Ez a lehetőség az RTK-val rendelkező felhasználók számára jelent nagy segítséget Továbbá lehetőség van DGPS korrekciók vételére az arra felkészített vevők alkalmazásával. Az adatokhoz az Internetet és a GPRS-technikát használva lehet hozzájutni A rendszer használatával egy új alappont centiméter pontosságú meghatározása csak néhány percet vesz igénybe, és mivel a helymeghatározás koordináták
leolvasásává egyszerűsödik, amelyet laikusok is el tudnak végezni, a GNSS infrastruktúra a geodézia néhány hagyományos feladatát is jelentősen átértékeli. További információk: http://wwwgpsnethu/ 6. Mobil térinformatika 6.1 Mobil GIS fejlődése Mobil térinformatika – egy kifejezés, mellyel egyre gyakrabban találkozhatunk. Mobilitás – a rugalmasság, a feltételekhez való gyors alkalmazkodás képessége életünk minden területén egyre nagyobb értelmet nyer, értéket képvisel. Térinformatika – napjaink felgyorsult, infor11 mációktól már-már túltelített világában az ezeket hordozó adatok 50-70%-a valamilyen módon térbeli vonatkozással bír. Szinte magától adódik a „felvetés”: ötvözzük a mobilitást a térinformatikával Nyerjük adatot, kezeljük, elemezzük és akár jelenítsük is meg közvetlenül a terepen, a mérést követően akár perceken belül. A térinformatikai adatgyűjtések megszokott eszközévé vált a
GPS, mely területen az utóbbi években jelentős változások történtek, s az elkövetkező 5-10 év újabb előrelépéseket ígér. A valódi mobilitás megvalósításában két tényező játszik kulcsszerepet Az első a kisméretű, hordozható számítógépek elterjedése és rohamos fejlődése A másik a vezeték nélküli (wireless) technológiák térnyerése Ez utóbbi által lehetővé válik az adatelérés – a hálózati lefedettség függvényében – az irodán kívül, a terepen is Mindez az irodai–terepi munkafolyamatok új eloszlását is maga után vonja, gyakran sok időt és energiát spórolva meg a felhasználónak. A mobil számítógépek a technológiai fejlődés során egyre inkább alkalmassá váltak GIS funkciók megvalósítására. Ebben nagy szerepet játszottak a különféle kiegészítő eszközök és technológiák is, mint a flash memóriák 3, GSM/GPRS 4 modemek, GPS vevők és WLAN 5 hálózatok. Ezzel párhuzamosan folyamatos
fejlődést figyelhettünk meg a GPS technológiában is, mely egyrészt a pozícionálás pontosságának növekedésében, másrészt az eszközök méretének csökkenésében jelentkezett. Az optimális mobil konfiguráció tulajdonképpen ésszerű kompromisszumot jelent a hordozhatóság és a megfelelő kapacitás (kijelző mérete és felbontása, memória és processzor kapacitás, hálózati és perifériális kapcsolódási lehetőségek) között. Ezek az eszközök mind hardver, mind szoftver komponenseikben is sokban eltérnek asztali (desktop) társaiktól. Fontos előnyük az ún solid state (szilárd félvezető) technológia, ami kisebb energiafogyasztást és nagyobb ellenállóképességet jelent a fizikai behatásokkal szemben. Ennek ellenére az energiaellátás megoldása gyakran problémákat jelenthet, ami adataink biztonságát is veszélyeztetheti, bár napjainkban a flash memóriák rohamos térnyerésével ez megoldódni látszik. Meggyorsítja a terepi
munkavégzést az azonnali ki- és bekapcsolás lehetősége, mivel nem szükséges minden esetben a rendszer bootolása A mobil számítógépek döntő hányadán napjainkban a Microsoft Windows CE alapú operációs rendszerei futnak. Az asztali Windows verziókhoz hasonló kezelőfelület és fájlrendszer nagyban megkönnyíti a kezelést és a két rendszer közötti átjárást (pl adatátvitel) A mobil operációs rendszerek funkcionalitása ugyanakkor még messze elmarad a desktop környezetben megszokottaktól Gyakran problémát jelent a Windows CE-re fejlesztett alkalmazások limitált száma vagy korlátozott funkcionalitása is. 6.2 Mobil GIS alkalmazási területei A mobil GIS földrajzi információs rendszer (GIS–FIR) szoftverek, globális helymeghatározó rendszer (GPS) és mobil számítógépek kombinációja. Ez a technológia alapjaiban változtatja meg az információgyűjtés és -feldolgozás folyamatát. Lehetővé teszi az információk közvet- A flash
memória az adatokat a tápfeszültség kikapcsolása után is megőrzi, elektromosan lehet törölni és újraprogramozni. 4 General Packet Radio Service – csomagkapcsolt mobil adatátviteli technológia, mely 115 Kbit/s sebességű kapcsolatot biztosít 5 Wireless Lokal Area Network – vezetéknélküli helyi hálózat, nagyfrekvenciás rádióhullámok felhasználásával 3 12 len, azonnali megjelenítését a digitális térképen. Az adatgyűjtés az észlelés helyén történik, közvetlen kölcsönhatásban a környezettel. Napjainkig a terepi adatgyűjtés és -feldolgozás papíralapú folyamat volt. A több ponton történő adatbevitel mellé nem társult a valós idejű információk elérése vagy a terepi észlelések irodába történő továbbításának lehetősége. A jelenlegi mobil GIS technológiai fejlődés nagy hasznot hozott a terepi adatgyűjtésben, a terepi munka hatékonyságának és a pontosságának növelése által. Az adatok valós
környezetben történő közvetlen összehasonlíthatósága a földrajzi objektummal mélyebb értelmet ad a GIS adatbázisok realitásának A mobil GIS alkalmazása jelentősen növeli a következő terepi folyamatokat hatékonyságát: • Vagyonleltár – valamilyen vagyon helyének és attribútumainak felvétele digitális térképre. • Vagyongondozás – vagyonok helyzetének és állapotának menedzselése, illetve terepi karbantartási jegyzékek készítése. • Ellenőrzés, felügyelet – terepi vagyontárgyak digitális rekordjainak felügyelete törvényi előírások szerint. • Váratlan események tudósítása – véletlen esetek és események speciális felvétele. Az alábbi táblázat a mobil térinformatika néhány alkalmazási területéről hoz egy-egy példát. Kormányzati Közmű és Infrastruktúra Környezeti Közbiztonság Vagyonleltár Jelzőtábla leltár Helyhatósági vagyon Faállomány felmérése Beszerelések felvétele Esővíz
elvezetők leltára Toxikus anyagok leltára Ásványkutatás Katonai terepi munka és térképezés Légi felmérés Tüzek térképezése Vagyongondozás Utak állapotnak felmérése Közvilágítás felmérése Villanykarók gondozása Új eszközök felszerelése Termésmenedzsment Föld alatti infrastruktúra lokalizálása Betegnyilvántartás Ellenőrzés, felügyelet Útburkolat menedzsment Egészségi állapot ellenőrzése Lakáshelyzet Mérőeszköz leolvasás Fertőző rendszerek felügyelete Dokumentálás Élőhely tanulmányozás Gyomnövényirtás Kárfelmérés Váratlan események Nyugat-Nílusi vírus Zavargások felmérése Áramszünetek lokalizálása Vízmintavétel Részletes kárfelmérés Balesetek tudósítása GIS adatok érvényessége Navigálás Fogyasztók lokalizálása mérőeszköz leolvasásához, számlázáshoz Navigálás Mezőgazdasági statisztikák számítása Nyomozáshoz címek lokalizációja Vészhelyzet által
érintett lakosok számának meghatározása GIS analízis X.táblázat Mobil GIS alkalmazások 6.3 Az ESRI ArcPad 6 mobil térinformatikai szoftver főbb jellemzői 13 Az ESRI ArcPad mobil GIS és terepi térképezési alkalmazásokban használható szoftver, amely térképező, GIS és GPS szolgáltatásokat nyújt integrálva a felhasználónak. Az ArcPad integrálódik az ArcGIS és egyéb technológiákkal, ArcIMS-hez vagy Geographic Networkhöz kliensként képes kapcsolódni. A terepen gyűjtött adatok az irodában könnyen betölthetők a központi adatbázisba. Az adatátvitel az Interneten keresztül is történhet, akár vezeték nélküli kommunikációt használva A rendszer GPS vagy DGPS eszközzel kombinálva valós idejű adatnyerést tesz lehetővé Rendelkezik a hagyományos GIS funkciókkal, mint a térképi navigáció, rétegek, lekérdezések, hiperlinkek kezelése, stb. A program közvetlenül, köztes formátumok alkalmazása nélkül képes asztali
GIS-ek formátumainak kezelésére. Vektoros adatokat ipari-standard shapefile formátumban tárolja. Kezeli továbbá a következő raszteres adatformátumoat: JPEG, PNG, CADRG 6, MrSID 7, BMP (Mobile GIS, 2004). A mobil eszközök korlátozott számítási és tárolási kapacitása miatt gyakran használnak tömörített raszteres formátumokat, amelyek képesek a georeferencia információkat is tárolni Ilyen a MrSID vagy a geoJPEG. A raszteres és vektoros állományok kezelését multilayer környezetben is támogatja. Kezeli a desktop rendszerekben létrehozott, térbeli indexeléssel ellátott shapefileokat is Számos vetületi rendszert ismer, emellett a felhasználó is definiálhat újakat A dátum adatbázisa tetszőlegesen bővíthető. Az ArcPad integrálható opcionális GPS vagy DGPS eszközzel. A csatlakoztatott GPS segítségével megjeleníti az aktuális pozíciót és annak koordinátáit a kijelzőn Támogatja a legelterjedtebb adatátviteli protokollokat (NMEA
0183, TSIP, stb), lehetőségünk van a beérkező jelek szűrésére, minőségi mutatók (HDOP, PDOP, EPE) megjelenítésére. Az adatnyerés különböző módjai lehetségesek GPS vevővel (stream, point, pozícióátlagolás is) Az ESRI desktop GIS rendszereiből (ArcView 3.x, ArcGIS) egy kiterjesztésként telepíthető eszköztár segítségével a rétegek szimbólumait is exportálhatjuk az ArcPad által olvasható típusokba. Az ArcPad mobil térinformatikai rendszer – más rendszerekhez hasonlóan – a felhasználó által szabadon és széleskörűen testre szabható. Ezáltal speciális, az egyéni igényeknek leginkább megfelelő alkalmazások hozhatók létre, ami megnöveli a terepei munka hatékonyságát Ehhez az ESRI egy saját fejlesztőkörnyezetet alakított ki. Az ArcPad Studio segítségével már programozási ismeretek nélkül is elvégezhetők egyszerűbb testreszabási műveletek. Bonyolultabb megoldásokhoz az ArcPad saját objektum szerkezetét
használhatjuk fel VBScript nyelven írt kódjainkban. A profi programozóknak további lehetőségek állnak rendelkezésére az alapszoftver funkciókészletének kibővítéséhez. Ezeket 5 fő csoportba sorolhatjuk: • Egyéni form-ok létrehozása a streamline terepi adatgyűjtéshez. • Új eszköztárak készítése meglévő vagy saját eszközökből. • Scriptek írása bizonyos eljárások automatizálására az ArcPad saját objektum modellének felhasználásával. • Applet 8-ek készítése komplett alkalmazásokhoz. • Kiterjesztések programozása új fájlformátumok, szenzorok, helymeghatározó szolgáltatások támogatására. 6 Compressed ARC Digitised Raster Graphics Multi-resolution Seamless Image Database 8 Applet: más alkalmazásból futtatható program 7 14 A következő ábrákon a fejlesztőkörnyezetet (X.ábra) és egy példaalkalmazást (Yábra) láthatunk A VBScript nyelven írt applet az ArcPad saját objektumszerkezetét használja föl A
létrehozott eszköztár a karsztos területek dolináinak terepi felvételezését segíti. Az objektumok adatait (attribútumok a shape adattáblájának mezőiben) egy több lapból álló űrlapra (form) kell felvinni. A speciálisan az igények szerint elkészített formulákkal jelentősen felgyorsítható a terepi adatfelvétel X.ábra Az ArcPad Studio kezelőfelülete 15 Y.ábra Az applet eszköztára és az adatfelvevő űrlap egy oldala Felhasznált és ajánlott irodalom Ádám J., Bányai L, Borza T, Busics Gy, Kenyeres A, Krauter A, Takács B: Műholdas helymeghatározás. Műegyetemi Kiadó, 2004 p 458 Borza-Gerő-Mohos-Szentpéteri: GPS mindenkinek. Sztrato Kiadó, Bp 2005 p 256 Dr. habil Tamás János – Dr Lénárt Csaba: Terepi Térinformatika és a GPS Gyakorlati Alkalmazása Litográfia Kft Debrecen, 2003 p 199 16
rádióhullámok terjedési sebessége a fénysebességgel egyezik meg, azaz 300000 km másodpercenként és ezt megszorozva a terjedési idővel megkapjuk a keresett távolságot. A pontos időmérés alapkövetelmény, mert egy másodperc egymilliomod része alatt a jel kb. 300 méteres távolságot tesz meg A megfelelő pontosságú helyzet-meghatározáshoz az időmérés pontosságát legalább egy nanoszekundumban határozták meg. Hogyan határozható meg a vett rádiójelek alapján a pozíciónk? Egy ismert A helyen lévő adó rádiójeleit venni tudjuk készülékünkkel és az adó koordinátáit beprogramoztuk a speciális vevőnkbe. A távolság kiszámítása után helyzetünk még nem meghatározott, de tudjuk, hogy pozíciónk a vevőtől, mint középponttól, a kiszámított sugarú körvonalon található. Mérjük meg távolságunkat egy másik B adóállomástól is, ekkor a lehetséges pozícióink száma kettőre, a két körvonal metszéspontjaira: P,Q szűkül
Egy harmadik C adótól is megmérve a távolságunkat a pontos pozíciónk már egyértelműen meghatározható. A kezdeti rádiónavigációs rendszerek alapját ezek a földfelszín ismert pontjain elhelyezkedő A,B,C, stb. rádióállomások jelentették A távolság mérésére különböző trükkös megol- 1 dásokat dolgoztak ki a késleltetési idők és fázisszögek kimérésével (pl. a LORAN 1 rendszerben) De a földi irányadókra épülő rendszerek mindegyikének közös problémája, hogy a rádióadók vételi körzete és vételi lehetőségei korlátozottak, esetlegesek és lényegében az adók és a meghatározandó pont közel azonos síkban való elhelyezkedését vették alapul. (Egy adótól 4 kilométerre 3000 méter magasságban szálló repülőn ugyanazt az adatot mérjük, mint az adóval azonos tengerszint feletti magasságon, 5 kilométerre levő járművön.) Ez a hajózásban még elmegy, de a repülésben már nem. 1.2 Műholdas navigáció Az
előbbiekben említett problémák (korlátozott lefedettség, csak vízszintes pozíció) megoldására a rádióadókat műholdakra telepítették, amelyek kellően nagy magasságú pályáikról biztosítják a globális lefedettséget, vagyis a Föld bármely pontján megfelelő számú műholdjel vételét. A rendszer alapelve megegyezik a földi rádiónavigációs rendszer elvével, a különbségek a következőkben foglalhatók össze: • képes háromdimenziós helymeghatározásra, • a műholdak helyzete folyamatosan változik (nem állandó, mint a földi rádióadóknál), pillanatnyi pozíciójuk ismeretének pontossága befolyásolja a meghatározni kívánt helyzet pontosságát. Az első műholdas rendszerek egyike a Transit 2 volt, melynek fejlesztése és kiépítése során szerzett tapasztalatok nagyban hozzájárultak a manapság is használatos helymeghatározó rendszerek (GPS, GLONASS) születéséhez és működéséhez. 2. Műholdas helymeghatározó
rendszerek 2.1 Az orosz GLONASS Az első GLONASS (GLObal NAvigation Satellite System) műholdat 1982 októberében lőtték fel. A teljes kiépítésben a 24 darab GLONASS műhold 19 100 km-es magasságban, közel kör alakú pályán kering három pályasíkban (inklinációja 64.8º), melyek 120º-os szöget zárnak be egymással A pályánként 8 műhold egyenlő távolságra van egymástól, egy teljes pálya megtétele kb 11 óra 15 percig tart A műholdak pályáját úgy tervezték meg, hogy egyszerre legalább 5 holdat lásson a felhasználó 1 LORAN (LOng RAnge Navigation): 1950-es években kiépített rádiónavigációs rendszer. A rendszer minden láncszeme legalább négy adóból áll, kb. 800 km-es útvonalat fed le és a láncszemek hálózata alkotja a teljes rendszert, pl. az USA nyugati partján a navigációt két láncszemmel biztosították Nem globális rendszer, csak a földfelszín 5 %-án tette lehetővé a navigációt. Pontossága kb 250 méter 2 Az USA
Haditengerészete számára 1961-ben fejlesztették ki, polgári felhasználása 1967-ben kezdődött, és 1994-ben a rendszer működésével együtt fejeződött be. Alapvető célja a tengerészeti navigáció volt, de hasznosították geodéziai célokra is, amelyet hosszú észlelési idő, utófeldolgozás és viszonylag alacsony, 1 méter körüli pontosságok jellemeztek. A mérés alapelve az volt, hogy a vevő a földi pont és a műhold távolságának megváltozását határozta meg egy megadott időintervallumra a Doppler-elv alapján 2 A rendszer műholdjai két jelet sugároznak folyamatosan: a SP szabványos pontosságú jel (57-70 m pontosság), a HP katonai jel pedig nagy pontosságú. A polgári felhasználók számára csak az SP hozzáférés engedélyezett, ezt azonban nem rontják el mesterségesen 2006 novemberben 16 pályán lévő műhold közül 11 működött rendszeresen, így a rendszer helymeghatározási feladatokra már alkalmazható és a
kombinált GPS/GLONASS vevők is megjelentek és elterjedőben vannak. További információk: http://wwwglonass-iancrsaru/ 2.2 Az amerikai (USA) GPS A NAVSTAR (Navigation System with Timing and Ranging) GPS fejlesztését az Egyesült Államok Védelmi Minisztériuma (DoD) kezdeményezte 1972-ben. Létrehozása elsősorban katonai célokból történt, de a polgári hasznosítását is lehetővé tették. A rendszer alkotóelemeit a következő pontokban tekintjük át 2.21 A műholdak A műholdpályák helyzete, a műholdak száma és elhelyezkedése azt biztosítja, hogy a Földfelszín bármely pontján, tetszőleges időpontban egyszerre legalább négy műhold legyen észlelésre alkalmas helyzetben, legalább 15°-kal a horizont felett. Jelenleg (2006 novemberben) a rendszer 30 műholdjából 29 aktív, amelyek hat különböző – az Egyenlítővel 55º-os szöget bezáró - pályán helyezkednek el. Mind a hat pályán legalább 4 műhold és további tartalék műholdak
keringenek 20200 km magasan, közel kör alakú pályán, 11 óra 58 perces keringési 3 idővel. A közel 750 kg tömegű műholdakon rádió adó-vevő készülék, atomóra (cézium, rubidium) található és a működéshez szükséges energiát napelemek biztosítják. A műhold rádióüzenete egyrészt lehetővé teszi a földi ponton a műhold-vevő távolság meghatározását, másrészt információt ad a műhold pontos térbeli helyzetéről. A műholdak által sugárzott navigációs üzenetek a pályaadatok és –korrekciók, valamint az óraparaméterek mellett a műholdakra vonatkozó státusz-információt (on/off) és ionoszféraparamétereket is tartalmaznak. Az ionoszféra jelkésleltető hatása súlyos hibával terhelné a mérés eredményét. A közelítő pálya- és óraadatokat tartalmazó információkat, a legalább 6 naponként frissített almanach üzenetekben kapják meg a felhasználók, amelyeket többek között a méréstervezéshez
használhatnak föl. 2.22 Földi monitor állomások Az ismert WGS-84 koordinátájú földi követő állomások a helymeghatározási feladat fordítottját oldják meg: ismert helyzetvektorok sorozatából pályaadatokat számítanak. Egyszerre kezdetben öt állomás mért, manapság már tucatnyi a monitor állomások száma. A műholdakra vonatkozó adatokat a vezérlő központban (Colorado Springs, USA) értékelik, meghatározzák a pálya- és időkorrekciókat, majd az adatokat a műholdak fedélzeti számítógépének memóriájába juttatják 2.23 Felhasználók A világszerte működő több tízmillió GPS vevőberendezés antenna-egységből és jelfeldolgozó-egységből áll. Az antenna-egység feladata az észlelési programban kiválasztott műholdak összetett jelének vétele. A jelfeldolgozó-egység legfontosabb része navigációs célú készülék esetében a gyors működésű számítógép, helymeghatározásra szolgáló mozdulatlan vevőkészülék
esetében a nagy kapacitású adattároló. A korszerű vevők többcsatornásak, azaz egy időben több – általában 8-14 – műhold jelének vételére alkalmasak. Leggyakrabban alkalmazott csoportosításuk szerint megkülönböztethetünk: navigációs (kb. 15-20 m-es pontosság), térinformatikai (méteres-szubméteres pontosság), valamint geodéziai (cm-es pontosság) vevőket, amelyeket hosszú mérési idővel (12-24 óra) és tudományos feldolgozással geodinamikai (pl. kőzetlemezek mozgása, izosztázia) célra, mm-es mozgások meghatározására is alkalmaznak. További információk pl: http://tycho.usnonavymil/gpshtml http://www.ngsnoaagov/GPS/GPShtml 3. Hogy működik a GPS? A helymeghatározás geometriai alapelve a térbeli ívmetszés feladata: ha feltesszük, hogy az ismeretlen helyzetű pont a földfelszín közelében helyezkedik el és ismerjük három műholdtól mért távolságát, akkor a három gömbfelület két pontban metszi egymást. A két
megoldás közül egyszerűen kizárható az a pont, amelyik a valahol a világűrben helyezkedik el Az egyértelmű megoldást egy negyedik műholdtól mért távolság szolgáltatja, de a gyakorlatban több, 4 akár tíz műhold is részt vesz a helyzetmeghatározásban, a megoldást az összes mérés alapján kiegyenlítéssel kapjuk. 3.1 Távolságmérés A vevő és a műhold közötti távolság d (m) meghatározása közvetett módon, időmérésre viszszavezetve történik. A rádióhullámok terjedési idejének t (s) és a rádióhullám terjedési sebességének - a fénysebességnek – ismeretében: d (m) = t(s) x 3x108 (m/s) 3.2 Időmérés A jel terjedési idejének mérését, amely kb. 0,06 mp-nyi időtartam megmérését jelenti, a következőképpen valósították meg a helymeghatározó rendszerekben: a műholdon és a vevőben is egy-egy órát helyeztek el. Az órák kb egy ezredmásodpercenként ugyanazt a – műholdanként különböző, közel
véletlenszerű - kódsorozatot generálják A műhold jele a vevőhöz a közöttük lévő távolság megtételéhez szükséges idővel később érkezik. A vevő összeveti (elcsúsztatja) a saját jelsorozatát a műholdról érkezett jelsorozattal és a különbség éppen a késési időt adja meg, ha mindkét óra tökéletesen szinkronizált és pontos 5 Azonban a nagypontosságú időmérés (rubidium és cézium atomórákkal) csak a műholdakon oldható meg, míg a vevőkben egyszerű kvarcórákat helyeznek el. A pontatlan időmérés viszont minden egyidejű észlelést azonos hibával terhel, így egy negyedik műholdtól való mérésből az órahiba (dt) számítható Az alábbi ábrán a síkbeli helyzet látható, térben négy mérés szükséges az órahiba meghatározásához és az egyértelmű geometriai megoldáshoz: A fentiekből következik, hogy a vevőknek legalább négycsatornásnak kell lenniük. A gyakorlati számításokban a meghatározandó
pont 3 térbeli koordinátáját és a vevő órahibáját is ismeretlennek tekintve, a négy műholdra történő mérésből származó 4 egyenletből a feladat egyértelmű megoldását kapjuk. A helymeghatározás egyenletrendszere tehát a következő alakú: s = 1.n Prs = ( X s − X r ) 2 + (Y s − Yr ) 2 + ( Z s − Z r ) 2 + Cr ahol Xs, Ys, Zs Prs Xr, Yr, Zr Cr n az s jelű műhold ismert térbeli derékszögű koordinátái az s jelű műholdra az r jelű vevővel mért és javított kódtávolság az r jelű vevő ismeretlen térbeli derékszögű koordinátái a vevő óraigazítatlanságának hatása távolságegységben az észlelt műholdak száma 3.3 Kódmérés A GPS műholdak két jelet sugároznak: L1=1575,42 MHz és a L2=1227,60 MHz vivőhullám hosszakon. Az L1 és L2 frekvenciát a nagyobb mérési pontosságot biztosító P (precision) korlátozott hozzáférésű kóddal modulálják, amelynek hullámhossza 30 m és csak az arra jogosult, elsősorban katonai
felhasználók használhatják. Az L1 frekvenciát a szabad elérésű 6 C/A (coarse/acquisition - durva/elérés) kóddal modulálják, amely 300 m hosszú és kisebb mérési pontosságot tesz lehetővé. A C/A kód véletlen kód, zérusokból és egyesekből áll. Egy elem frekvenciája υ=1,023 MHz, a kód 1023 bit hosszú. Időben kifejezve egy elem 1 mikroszekundumnak (0,000001 mp-nek) felel meg, a teljes kód 1 milliszekundumnak (0,001 mp-nek) felel meg, így: • egy elem hossza: λ=c/υ=2,99792458*1080,97751710610-6=293,052 [m], • az egész kódsorozat hossza: 293,052*1023 = 299792,458 [m]. A jobb minőségű vevők mérési pontossága a kódelem (~300 m) 1 %-ára tehető, így ennél a mérési módszernél megközelítőleg 3 méteres mérési zajra számíthatunk. 3.4 Vivőfázis mérése A vivőjel frekvenciája (L1 : 19,05 cm; L2 : 24,45 cm) kb. 1000-szerese a kódfrekvenciának, így ennél a mérési módszernél a pontosság növekedése is 1000-szeres a
kódméréssel összehasonlítva, vagyis a jelkiértékelés mm-es pontossággal végezhető el (1 %-os mérési zajjal számolva). Problémaként jelentkezik a módszernél, hogy az egész periódusok száma nem ismert (fázis többértelműség). A probléma megoldására matematikai modelleket, illetve kétfrekvenciás vevőket alkalmaznak 3.3 Hibaforrások A GPS műholdak helyzetét, vagyis X,Y,Z geocentrikus koordinátáit ismernünk kell a helymeghatározáshoz. A műholdak a kódsorozatok mellett közlik a navigációs üzeneteikben az aktuális pályaadatokat, az efemeridákat. A földi vezérlőállomások meghatározott időközönként frissítik, javítják az adatokat és visszajuttatják azt a műholdakra A műholdak pozíciójának hibáját kerethibának nevezik a geodéziában Legjelentősebb hibaforrásként a földi légkörnek a GPS jelre gyakorolt késleltető hatását említhetjük. A terjedés sebességére az egyenletes fénysebesség csak vákuumban igaz, az
ionoszférában és troposzférában az elektromágneses sugárzás késleltetést szenved, amelynek a távolságmérésre gyakorolt hatása több tízméteres nagyságrendű is lehet. Kiküszöbölésére modellezést, illetve kétfrekvenciás mérésre alkalmas (drágább) készülékeket használnak, mivel a hatás frekvenciafüggő. További hibajelenségként értelmezhető a többutas terjedés (multipath) problémája, amely akkor jelentkezik, ha a műhold jele nem közvetlenül, hanem valamely közeli visszaverő felületről közvetetten érkezik a vevőhöz. Ez a jelenség a nagyobb pontosságú méréseket érinti és különböző típusú, speciális antennákkal küszöbölik ki a jelenséget. A műholdgeometria is hatással van a mérés pontosságára. A műholdak elhelyezkedése az égbolton jelentősen befolyásolhatja a mérést. Ideális a helyzet, ha az égbolton minden irányban egyenletesen találhatók műholdak, míg romlik a geometria, ha a holdak egymáshoz
közel, „egy csomóban” helyezkednek el. Ezt a hatást fejezi ki a DOP (Dilution of Precision) érték 7 A kisebb DOP érték nagyobb mérési pontosságot tesz lehetővé, ideálisan pl. a GDOP értékének 2-4 között kell lennie Az eredeti katonai célokkal összhangban a DoD a szelektív elérhetőség (selective availability, röviden SA) politikáját gyakorolja, ami azt jelenti, hogy esetenként (pld. az öbölháború idején) korlátozza a teljes rendszer használatát a polgári alkalmazóknak. Gyakorlatilag ez korábban úgy történt, hogy csonkolták azokat az üzeneteket, melyek a műhold koordinátáit továbbítják a vevőknek. A C/A kódra műholdanként változó, alacsony frekvenciás (hosszú idő alatt ismétlődő) torzítást vittek, mely az eredeti 30 m-es pontosságot 100 méter körülire csökkentette A SA-et 2000 május 1-től Clinton elnök megszűntette Az abszolút meghatározást terhelő hibahatások (HDOP=2; VDOP=2,5) Hibaforrás műhold
pálya műhold óra ionoszféra troposzféra többutas terjedés vevő zaja URE (felhasználó távolsághibája) vízszintes helyzethiba (HDOP*URE) magassághiba (VDOP*URE) Távolsághiba (m) 2,3 2,1 4 1,4 1,4 0,5 5,1 10,2 12,8 4. Mérési technikák, a vevők típusai Abszolút és relatív helymeghatározás: 1. Abszolút (navigációs) mérés: egyetlen vevővel végezzük, eredménye lehet XYZ térbeli derékszögű koordináták, vagy λϕ földrajzi koordináták (pl. WGS-84) A mérés hibája névlegesen 15-20 méter, de manapság, mérési tapasztalataink szerint, már néhány méteres pontosságú navigációs mérés is lehetséges. 2. Relatív helymeghatározás: két vevővel, egyidejű méréssel történik, az egyik vevőt, amelyhez viszonyítunk, referencia-állomásnak nevezzük. A mérés a két pont közötti relatív térbeli távolság Δx, Δy, Δz összetevőit adja meg A geodéziai pontossághoz relatív módszerrel fázismérést kell végeznünk A
kiértékelés típusai: 1. Valós idejű (real time): relatív méréskor a valós pozíciónkat nagyon kis időkülönbséggel a helyszínen kapjuk meg 2. Utófeldolgozással (post processing): két vevővel történő mérésnél a pontos pozíciót utólagos adatfeldolgozás során határozzuk meg Statikus, kinematikus helymeghatározás: 1. Statikus mérés: mérés közben mozdulatlan vevőkkel történik 2. Kinematikus mérés: mozgó vevővel (rover) mérünk, míg a referenciavevő (bázis) ismert ponton áll. 4.1 Navigációs mérés 8 A pillanatnyi helyzet meghatározására szolgál, funkció lehetnek pl. célpont felkeresése, bejárt útvonal rögzítése, stb Jellemzői: • vízszintes pontosság: névlegesen 15-20 m, de lehet néhány méteres is, • magasságmérés pontossága: bizonytalan, javítás: pl. barométer + kalibrálás, • kijelzés: általában földrajzi, de lehet EOV is. 4.2 Differenciális GPS (DGPS) Valós idejű, relatív, kódmérést
jelent. Két vevővel történik: • referencia-állomás (bázis) korrekciós adatokat szolgáltat (50 km-es körzetben), • mozgó (rover) vevő a korrekciós adatokkal javítja saját méréseit, • pontossága jellemzően méteres, szubméteres. 4.3 Statikus GPS mérés Mozdulatlan vevők közötti térbeli vektorok meghatározása szolgál, fázisméréssel. A térbeli vektorokból a térbeli hálózat kiegyenlíthető (fix pontokra). Több 10 km-es, de akár több 1000 km-es vektorok mérhetők cm pontossággal, de minél nagyobb a vektor, annál hosszabb mérési idő (atmoszférikus hatások kiküszöbölésére) és speciálisabb vevő és feldolgozó program szükséges. A méréshez szükséges időtartam kb 30-50 perc, amely a vevőtől és a DOP értékétől függ. 4.31 Gyors statikus (rapid static) Általában 15 km-nél rövidebb vektorok meghatározására szolgál. A mérési idő rövidebb, mint a statikus mérésnél (10-30 perc), de a pontosság és a mérés
megbízhatósága valamelyest romlik. A mérési idő azonban egyre rövidül a rendszerek és a feldolgozó szoftverek fejlődésével 4.4 Kinematikus GPS mérés Ennél a mérési módszernél egy ismert ponton elhelyezett vevőhöz képest mérjük a pozíciót. Két típusa: • Folyamatos: mozgó vevő (jármű) útvonalát rögzítjük fázisméréssel, és • Stop and Go: terepen kijelölt pontokon rövid ideig (néhány epocha) mérünk. Jellemzői: • folyamatos jelvétel szükséges, • statikus inicializálás (periódusszám felvétele) szükséges az első ponton, • korszerű megoldás: menet közbeni inicializálás (OTF), szakadások megengedettek a jelvételben (zavaró tereptárgyak), • referenciaállomás max. 10-15 km-re lehet, • feldolgozás: utólagos. 9 4.5 Valós idejű kinematikus (RTK) mérés Geodéziai pontosságú terepi munkákhoz: felméréshez, pontkitűzéshez használatos módszerek. Jellemzői: • technika: megegyezik a kinematikus
mérésével, • feldolgozás: egyidejűleg a méréssel (real time), • referencia-adatokat rádión, vagy mobil GPRS technológiával közvetítik a mozgó vevőhöz, • mérés jósága azonnal ellenőrizhető, • hatótávolság: 5-10 km, de ez a GNSS rendszerek kiépülésével folyamatosan növekszik • legmagasabb készülékárak, • rádiófrekvencia használatához engedély szükséges. 5. Merre tart a műholdas helymeghatározás? 5.1 Az európai GALILEO Az Európa Tanács 2002-ben Madridban határozott a GALILEO rendszer kiépítéséről, és 2008-2010-re tervezik a teljes rendszer beindítását, 2006 őszén egy műhold tesztüzemmódban sugárzott adatokat. Tisztán európai és polgári felhasználású, a hely-, idő- és sebesség-meghatározást fogja segíteni. Jellemzői: • 3 pályán, pályánként 7 aktív és 3 tartalék műholdból áll, • jobb észlelhetőség az északi országokban és szűk, magas épületekkel határolt utcákban, • európai
vezérlő központokból irányítva gyors pályamódosításokra lesz lehetőség, • a jelenlegi GPS-nél nagyobb pontosságú és megbízhatóbb, • mindenki számára elérhető, ingyenes szolgáltatás, • speciális komponensek, pl. földi kiegészítő integrált hálózatok, használhatóság parkolóházakban és egyéb épületekben, fedett helyeken, • olcsó, többfunkciós vevőkészülékek. További információk: http://galileo.ihmhu/ 5.2 Az integrált GNSS A GNSS (Global Navigation Satellite System) integrált földi helymeghatározó rendszer, melynek alkotóelemei a már meglévő amerikai GPS, az orosz GLONASS és a tervezett európai GALILEO, valamint ezek geoszinkron műholdas (SBAS, pl. EGNOS, WAAS, OmniStar) és földi (GBAS, pl. német SAPOS, kelet-európai EUPOS) kiegészítő rendszerei A polgári felhasználók számára a legtöbb alkalmazási területen nagyobb pontosságot, magasabb integritási szintet (a rendszer működési problémáiról közel
valósidejű figyelmeztetés a navigációs felhasználók felé) tesz lehetővé. További információk: http://www.geoinfohu/geo/geodezia/3dgeodhtm 10 http://www.gpsmagazinhu/doc/GPS rendszerekdoc 5.3 A magyarországi GNSS-infrastruktúra Az első lépésben az 1990-es években hazánkban kiépült az ún. „passzív” GPS-hálózat, az OGPSH, amely megfelelő sűrűségű (10 km-es) referenciarendszert biztosít a relatív helymeghatározáshoz. A hálózat pontjai bázispontokként szolgálnak a geodéziai GPSmérésekhez Az infrastruktúra kiépítésének második generációs eleme az előre telepített permanens bázisállomások „aktív” rendszere, amely lehetővé teszi, hogy a felhasználó a mérés helyéhez legközelebbi, folyamatosan működő bázisállomás adatait felhasználva, egy mozgó vevővel utólagos feldolgozással relatív helymeghatározást végezzen. Előnye a gazdaságosság (idő- és költségmegtakarítás, mivel csak egy vevőre van
szükség) és a garantáltan hibátlan referenciaadatokkal elért pontosság és megbízhatóság. Jelenleg – 2006 őszén – a GPS hálózatnak 17 működő és további 6, közvetlenül üzembe helyezés előtt álló állomása van. A harmadik lépésben a valós idejű, geodéziai pontosságú adatszolgáltatás épül ki az ország teljes területére, amely hálózatával kapcsolódik a szomszédos országok rendszereihez is (EUPOS). A valós idejű korrekciókat, a már üzemelő állomások 30-35 km-es körzetében lehet biztonsággal használni Ez a lehetőség az RTK-val rendelkező felhasználók számára jelent nagy segítséget Továbbá lehetőség van DGPS korrekciók vételére az arra felkészített vevők alkalmazásával. Az adatokhoz az Internetet és a GPRS-technikát használva lehet hozzájutni A rendszer használatával egy új alappont centiméter pontosságú meghatározása csak néhány percet vesz igénybe, és mivel a helymeghatározás koordináták
leolvasásává egyszerűsödik, amelyet laikusok is el tudnak végezni, a GNSS infrastruktúra a geodézia néhány hagyományos feladatát is jelentősen átértékeli. További információk: http://wwwgpsnethu/ 6. Mobil térinformatika 6.1 Mobil GIS fejlődése Mobil térinformatika – egy kifejezés, mellyel egyre gyakrabban találkozhatunk. Mobilitás – a rugalmasság, a feltételekhez való gyors alkalmazkodás képessége életünk minden területén egyre nagyobb értelmet nyer, értéket képvisel. Térinformatika – napjaink felgyorsult, infor11 mációktól már-már túltelített világában az ezeket hordozó adatok 50-70%-a valamilyen módon térbeli vonatkozással bír. Szinte magától adódik a „felvetés”: ötvözzük a mobilitást a térinformatikával Nyerjük adatot, kezeljük, elemezzük és akár jelenítsük is meg közvetlenül a terepen, a mérést követően akár perceken belül. A térinformatikai adatgyűjtések megszokott eszközévé vált a
GPS, mely területen az utóbbi években jelentős változások történtek, s az elkövetkező 5-10 év újabb előrelépéseket ígér. A valódi mobilitás megvalósításában két tényező játszik kulcsszerepet Az első a kisméretű, hordozható számítógépek elterjedése és rohamos fejlődése A másik a vezeték nélküli (wireless) technológiák térnyerése Ez utóbbi által lehetővé válik az adatelérés – a hálózati lefedettség függvényében – az irodán kívül, a terepen is Mindez az irodai–terepi munkafolyamatok új eloszlását is maga után vonja, gyakran sok időt és energiát spórolva meg a felhasználónak. A mobil számítógépek a technológiai fejlődés során egyre inkább alkalmassá váltak GIS funkciók megvalósítására. Ebben nagy szerepet játszottak a különféle kiegészítő eszközök és technológiák is, mint a flash memóriák 3, GSM/GPRS 4 modemek, GPS vevők és WLAN 5 hálózatok. Ezzel párhuzamosan folyamatos
fejlődést figyelhettünk meg a GPS technológiában is, mely egyrészt a pozícionálás pontosságának növekedésében, másrészt az eszközök méretének csökkenésében jelentkezett. Az optimális mobil konfiguráció tulajdonképpen ésszerű kompromisszumot jelent a hordozhatóság és a megfelelő kapacitás (kijelző mérete és felbontása, memória és processzor kapacitás, hálózati és perifériális kapcsolódási lehetőségek) között. Ezek az eszközök mind hardver, mind szoftver komponenseikben is sokban eltérnek asztali (desktop) társaiktól. Fontos előnyük az ún solid state (szilárd félvezető) technológia, ami kisebb energiafogyasztást és nagyobb ellenállóképességet jelent a fizikai behatásokkal szemben. Ennek ellenére az energiaellátás megoldása gyakran problémákat jelenthet, ami adataink biztonságát is veszélyeztetheti, bár napjainkban a flash memóriák rohamos térnyerésével ez megoldódni látszik. Meggyorsítja a terepi
munkavégzést az azonnali ki- és bekapcsolás lehetősége, mivel nem szükséges minden esetben a rendszer bootolása A mobil számítógépek döntő hányadán napjainkban a Microsoft Windows CE alapú operációs rendszerei futnak. Az asztali Windows verziókhoz hasonló kezelőfelület és fájlrendszer nagyban megkönnyíti a kezelést és a két rendszer közötti átjárást (pl adatátvitel) A mobil operációs rendszerek funkcionalitása ugyanakkor még messze elmarad a desktop környezetben megszokottaktól Gyakran problémát jelent a Windows CE-re fejlesztett alkalmazások limitált száma vagy korlátozott funkcionalitása is. 6.2 Mobil GIS alkalmazási területei A mobil GIS földrajzi információs rendszer (GIS–FIR) szoftverek, globális helymeghatározó rendszer (GPS) és mobil számítógépek kombinációja. Ez a technológia alapjaiban változtatja meg az információgyűjtés és -feldolgozás folyamatát. Lehetővé teszi az információk közvet- A flash
memória az adatokat a tápfeszültség kikapcsolása után is megőrzi, elektromosan lehet törölni és újraprogramozni. 4 General Packet Radio Service – csomagkapcsolt mobil adatátviteli technológia, mely 115 Kbit/s sebességű kapcsolatot biztosít 5 Wireless Lokal Area Network – vezetéknélküli helyi hálózat, nagyfrekvenciás rádióhullámok felhasználásával 3 12 len, azonnali megjelenítését a digitális térképen. Az adatgyűjtés az észlelés helyén történik, közvetlen kölcsönhatásban a környezettel. Napjainkig a terepi adatgyűjtés és -feldolgozás papíralapú folyamat volt. A több ponton történő adatbevitel mellé nem társult a valós idejű információk elérése vagy a terepi észlelések irodába történő továbbításának lehetősége. A jelenlegi mobil GIS technológiai fejlődés nagy hasznot hozott a terepi adatgyűjtésben, a terepi munka hatékonyságának és a pontosságának növelése által. Az adatok valós
környezetben történő közvetlen összehasonlíthatósága a földrajzi objektummal mélyebb értelmet ad a GIS adatbázisok realitásának A mobil GIS alkalmazása jelentősen növeli a következő terepi folyamatokat hatékonyságát: • Vagyonleltár – valamilyen vagyon helyének és attribútumainak felvétele digitális térképre. • Vagyongondozás – vagyonok helyzetének és állapotának menedzselése, illetve terepi karbantartási jegyzékek készítése. • Ellenőrzés, felügyelet – terepi vagyontárgyak digitális rekordjainak felügyelete törvényi előírások szerint. • Váratlan események tudósítása – véletlen esetek és események speciális felvétele. Az alábbi táblázat a mobil térinformatika néhány alkalmazási területéről hoz egy-egy példát. Kormányzati Közmű és Infrastruktúra Környezeti Közbiztonság Vagyonleltár Jelzőtábla leltár Helyhatósági vagyon Faállomány felmérése Beszerelések felvétele Esővíz
elvezetők leltára Toxikus anyagok leltára Ásványkutatás Katonai terepi munka és térképezés Légi felmérés Tüzek térképezése Vagyongondozás Utak állapotnak felmérése Közvilágítás felmérése Villanykarók gondozása Új eszközök felszerelése Termésmenedzsment Föld alatti infrastruktúra lokalizálása Betegnyilvántartás Ellenőrzés, felügyelet Útburkolat menedzsment Egészségi állapot ellenőrzése Lakáshelyzet Mérőeszköz leolvasás Fertőző rendszerek felügyelete Dokumentálás Élőhely tanulmányozás Gyomnövényirtás Kárfelmérés Váratlan események Nyugat-Nílusi vírus Zavargások felmérése Áramszünetek lokalizálása Vízmintavétel Részletes kárfelmérés Balesetek tudósítása GIS adatok érvényessége Navigálás Fogyasztók lokalizálása mérőeszköz leolvasásához, számlázáshoz Navigálás Mezőgazdasági statisztikák számítása Nyomozáshoz címek lokalizációja Vészhelyzet által
érintett lakosok számának meghatározása GIS analízis X.táblázat Mobil GIS alkalmazások 6.3 Az ESRI ArcPad 6 mobil térinformatikai szoftver főbb jellemzői 13 Az ESRI ArcPad mobil GIS és terepi térképezési alkalmazásokban használható szoftver, amely térképező, GIS és GPS szolgáltatásokat nyújt integrálva a felhasználónak. Az ArcPad integrálódik az ArcGIS és egyéb technológiákkal, ArcIMS-hez vagy Geographic Networkhöz kliensként képes kapcsolódni. A terepen gyűjtött adatok az irodában könnyen betölthetők a központi adatbázisba. Az adatátvitel az Interneten keresztül is történhet, akár vezeték nélküli kommunikációt használva A rendszer GPS vagy DGPS eszközzel kombinálva valós idejű adatnyerést tesz lehetővé Rendelkezik a hagyományos GIS funkciókkal, mint a térképi navigáció, rétegek, lekérdezések, hiperlinkek kezelése, stb. A program közvetlenül, köztes formátumok alkalmazása nélkül képes asztali
GIS-ek formátumainak kezelésére. Vektoros adatokat ipari-standard shapefile formátumban tárolja. Kezeli továbbá a következő raszteres adatformátumoat: JPEG, PNG, CADRG 6, MrSID 7, BMP (Mobile GIS, 2004). A mobil eszközök korlátozott számítási és tárolási kapacitása miatt gyakran használnak tömörített raszteres formátumokat, amelyek képesek a georeferencia információkat is tárolni Ilyen a MrSID vagy a geoJPEG. A raszteres és vektoros állományok kezelését multilayer környezetben is támogatja. Kezeli a desktop rendszerekben létrehozott, térbeli indexeléssel ellátott shapefileokat is Számos vetületi rendszert ismer, emellett a felhasználó is definiálhat újakat A dátum adatbázisa tetszőlegesen bővíthető. Az ArcPad integrálható opcionális GPS vagy DGPS eszközzel. A csatlakoztatott GPS segítségével megjeleníti az aktuális pozíciót és annak koordinátáit a kijelzőn Támogatja a legelterjedtebb adatátviteli protokollokat (NMEA
0183, TSIP, stb), lehetőségünk van a beérkező jelek szűrésére, minőségi mutatók (HDOP, PDOP, EPE) megjelenítésére. Az adatnyerés különböző módjai lehetségesek GPS vevővel (stream, point, pozícióátlagolás is) Az ESRI desktop GIS rendszereiből (ArcView 3.x, ArcGIS) egy kiterjesztésként telepíthető eszköztár segítségével a rétegek szimbólumait is exportálhatjuk az ArcPad által olvasható típusokba. Az ArcPad mobil térinformatikai rendszer – más rendszerekhez hasonlóan – a felhasználó által szabadon és széleskörűen testre szabható. Ezáltal speciális, az egyéni igényeknek leginkább megfelelő alkalmazások hozhatók létre, ami megnöveli a terepei munka hatékonyságát Ehhez az ESRI egy saját fejlesztőkörnyezetet alakított ki. Az ArcPad Studio segítségével már programozási ismeretek nélkül is elvégezhetők egyszerűbb testreszabási műveletek. Bonyolultabb megoldásokhoz az ArcPad saját objektum szerkezetét
használhatjuk fel VBScript nyelven írt kódjainkban. A profi programozóknak további lehetőségek állnak rendelkezésére az alapszoftver funkciókészletének kibővítéséhez. Ezeket 5 fő csoportba sorolhatjuk: • Egyéni form-ok létrehozása a streamline terepi adatgyűjtéshez. • Új eszköztárak készítése meglévő vagy saját eszközökből. • Scriptek írása bizonyos eljárások automatizálására az ArcPad saját objektum modellének felhasználásával. • Applet 8-ek készítése komplett alkalmazásokhoz. • Kiterjesztések programozása új fájlformátumok, szenzorok, helymeghatározó szolgáltatások támogatására. 6 Compressed ARC Digitised Raster Graphics Multi-resolution Seamless Image Database 8 Applet: más alkalmazásból futtatható program 7 14 A következő ábrákon a fejlesztőkörnyezetet (X.ábra) és egy példaalkalmazást (Yábra) láthatunk A VBScript nyelven írt applet az ArcPad saját objektumszerkezetét használja föl A
létrehozott eszköztár a karsztos területek dolináinak terepi felvételezését segíti. Az objektumok adatait (attribútumok a shape adattáblájának mezőiben) egy több lapból álló űrlapra (form) kell felvinni. A speciálisan az igények szerint elkészített formulákkal jelentősen felgyorsítható a terepi adatfelvétel X.ábra Az ArcPad Studio kezelőfelülete 15 Y.ábra Az applet eszköztára és az adatfelvevő űrlap egy oldala Felhasznált és ajánlott irodalom Ádám J., Bányai L, Borza T, Busics Gy, Kenyeres A, Krauter A, Takács B: Műholdas helymeghatározás. Műegyetemi Kiadó, 2004 p 458 Borza-Gerő-Mohos-Szentpéteri: GPS mindenkinek. Sztrato Kiadó, Bp 2005 p 256 Dr. habil Tamás János – Dr Lénárt Csaba: Terepi Térinformatika és a GPS Gyakorlati Alkalmazása Litográfia Kft Debrecen, 2003 p 199 16
 Ahogy közeledik a történelem érettségi, sokan döbbennek rá, hogy nem készültek fel eléggé az esszéírás feladatra. Módszertani útmutatónkban kitérünk a történet térbeli és időbeli elhelyezésére, a források elemzésére és az eseményeket alakító tényezőkre is.
Ahogy közeledik a történelem érettségi, sokan döbbennek rá, hogy nem készültek fel eléggé az esszéírás feladatra. Módszertani útmutatónkban kitérünk a történet térbeli és időbeli elhelyezésére, a források elemzésére és az eseményeket alakító tényezőkre is.