A doksi online olvasásához kérlek jelentkezz be!
A doksi online olvasásához kérlek jelentkezz be!
Nincs még értékelés. Legyél Te az első!
Mit olvastak a többiek, ha ezzel végeztek?





Tartalmi kivonat
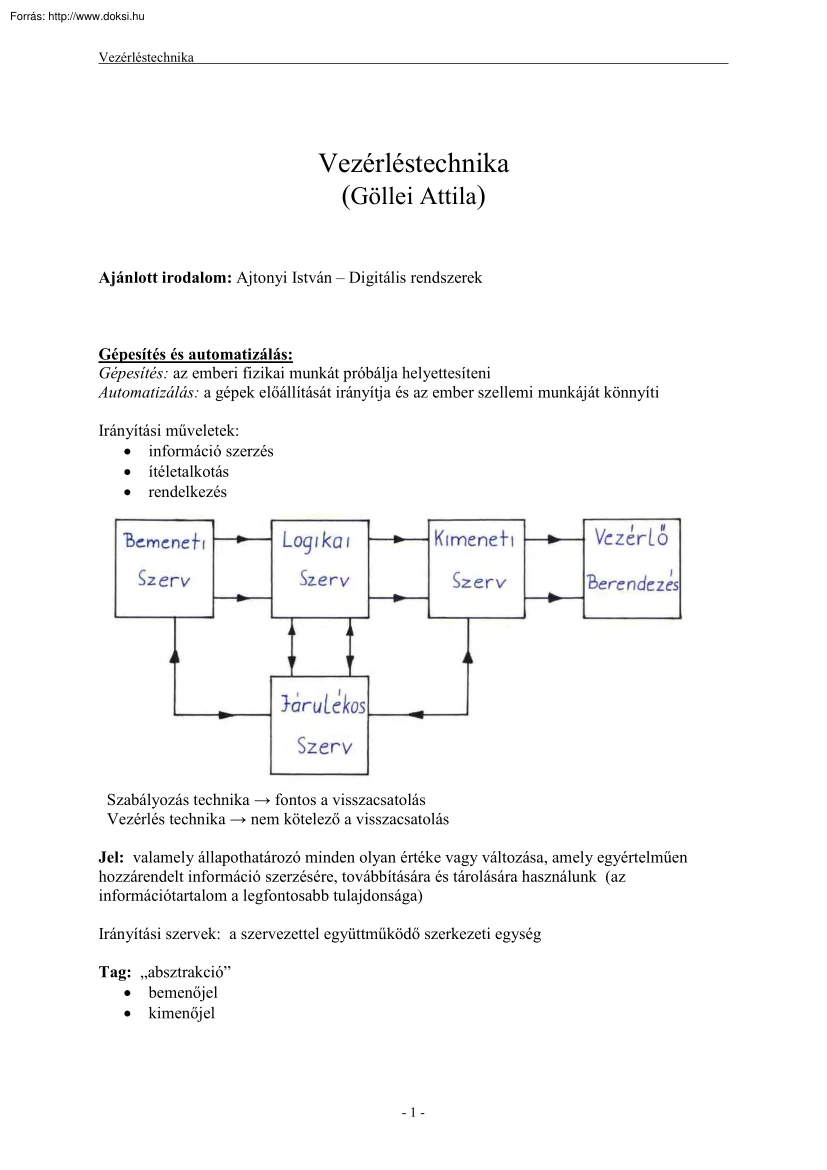
Vezérléstechnika Vezérléstechnika (Göllei Attila) Ajánlott irodalom: Ajtonyi István – Digitális rendszerek Gépesítés és automatizálás: Gépesítés: az emberi fizikai munkát próbálja helyettesíteni Automatizálás: a gépek előállítását irányítja és az ember szellemi munkáját könnyíti Irányítási műveletek: • információ szerzés • ítéletalkotás • rendelkezés Szabályozás technika fontos a visszacsatolás Vezérlés technika nem kötelező a visszacsatolás Jel: valamely állapothatározó minden olyan értéke vagy változása, amely egyértelműen hozzárendelt információ szerzésére, továbbítására és tárolására használunk (az információtartalom a legfontosabb tulajdonsága) Irányítási szervek: a szervezettel együttműködő szerkezeti egység Tag: „absztrakció” • bemenőjel • kimenőjel -1- Vezérléstechnika Nyitott hatáslánc: • ellenőrző jel nincs, csak rendelkező • csak a tervezésnél
figyelembe vett zavaró tényezőkkel számolunk • a vezérlés eredménye csak diszkrét digitális jel Diszkrét digitális jel: (kétváltozós jel) – eldöntendő kérdések sorozata • alacsony logikai szint: ’igaz’ • a földpont biztos stabil pont – ezért ez az igaz • a feszültség állandóan változik, így nem célszerű a magas szintet az ’igaznak’ választani Vezérléstechnikai elemek és szervek: Érzékelő és parancsoló szervek: • érzékelő szerv: technológiáról sereznek információt • parancsoló szerv: ember irányítja • logikai szerv: az egész rendszer működtetője • beavatkozó szerv: • végrehajtó szerv: • járulékos szerv: az egész rendszerről ad információt számunkra Különleges segédenergiás szervek: • villamos rendszer • pneumatikus rendszer • hidraulikus rendszer Eszközökkel szemben támasztott követelmények: • sugárzással szembeni védelem (illetve olyan alkatrészek alkalmazása, amelyek
közömbösek erre) • az alkatrészek élettartama (relék, tekercsek, ) nehéz üzemi körülmények: • mechanikaihatás • vegyi hatás • hőhatás Védettségi módok: • felhasználókkal szembeni védelem • ipari folyamatoknál a különböző felhasználási területeken egyéb más védelem (szigetelések és egyéb közegek kialakítása vagy a feszültségek módosítása) Bemeneti szervek: • érzékelő szervek: nyomásszabályozók, nyomásérzékelők: -analóg jelek helyett már digitális jelek alkalmazása a meghibásodás elkerülésére -az adott területtől, közegtől és a mérés tartományától függ a felhasználás módja hőmérsékletérzékelők: -a mérési tartomány fontos -különböző mérési módok forgásérzékelők: -2- Vezérléstechnika szintérzékelők: parancsoló szervek: ’alapjelek’ nyomógombok, kapcsolók, • beavatkozó szervek: relék – galvanikus leválasztást tesznek lehetővé • Segédenergiák:
villamos: + akár nagy távolságokra is (km-ekre) + könnyű vele a műveletvégzés + gyors működés + kis súly és méret + rezgésre nem érzékeny + energiaforrása megoldott - működés közben melegedés lép fel - tűz és robbanásveszélyes - érintésvédelem szükséges - karbantartása szaktudást igényel pneumatikus: + robbanás és tűzbiztonság + üzem közben nem melegszik + kis méret és súly + megfelelő kezelés mellett nagy üzembiztonság + alacsony karbantartási költségek + rázkódásra, sugárzásra nem érzékeny + a levegő a rendszer bármely pontján kiengedhető a szabadba + 0 – 3000 N erő kifejtésére alkalmas - zajos működés - villamos rendszerhez képest lassú - jeltovábbítás maximum 300 m - bonyolult csőhálózat kiépítése - táplevegőt elő kell állítani - karbantartása szaktudást igényel (olajozás szükségessége ???) - táplevegő tisztaságára érzékeny (por, páratartalom, olaj, ) hidraulikus: a jeltovábbító
rendszerhez nem ’savas’ olajra van szükség! + kezelés, karbantartás igen egyszerű + a munkafolyamatban használt olaj egyben kenés is + a jeltovábbító rendszer összenyomhatatlan, így a jelátvitel igen gyors + nagy erőhatásra képes (a rendszerben lévő olaj 150 – 200 bar-on működik) daruk, présgépek, emelők, . - bonyolult csőhálózat kiépítése az olaj oda – vissza vezetéséhez (két olajvezeték!) - az olajvezeték érzékeny a tömítetlenségre - az olajt meghatározott időnként cserélni kell, ami igen szennyező - tűzveszélyes Vezérléstechnikai rendszerekkel támasztott követelmények: Üzembiztonság: az eszköz egész rendszere működőképes -3- Vezérléstechnika Megbízhatóság: valószínűségi változó (0 – 1); egy alkatrész bizonyos időn belül meghibásodás nélkül működik jól számszerűsíthető Élettartam: olyan készülékeknél fontos, amelyek üzemszerű elhasználódásúak működés során kopás,
lép fel; ennek előre jól megtervezhetőnek kell lennie ( TMK: tervszerű megelőző karbantartás – szervizciklus) Nehéz üzemi körülmények: vegyipari, kohászati, élelmiszeripari, tevékenységekben üzemelő alkatrészekkel szemben támasztott követelmények eltérnek a hagyományostól (nedvesség, korróziót gyorsító vegyületek, por, magas hőmérséklet,) Védekezés: tokozás (tokozás ↔ hőmérséklet probléma: megfelelő tisztaságú szellőztetés - ’túlnyomásos szellőztetés’) Védettségi módok: a készüléket milyen módon kell a külső hatásoktól védeni; ezt a védettségi módot szabvány rögzíti: pl.: MSZ 806/1-76 IP XY: X – berendezés védettsége szilárd idegen test behatása ellen Y – berendezés védettsége folyadék behatása ellen X: 0 – 6-ig: 0 – nincs védettség 1 – nagyméretű testek behatása elleni védettség (emberi test – de nem szándékos) 2 – közepes méretű testek behatása elleni védettség (ujjak
ellen) 3 – kisméretű testek behatása elleni védettség (2,5 mm-nél vastagabb testek ellen) 4 - kisméretű testek behatása elleni védettség (1 mm-nél vastagabb testek ellen) 5 – káros méretű por behatása elleni védettség 6 – por behatása elleni védettség Y: 0 – 8-ig: 0 – nincs védettség 1 – vízcseppek lecsapódása elleni védettség 2 – vízcseppek lecsapódása elleni védettség, de az esési szög a függőlegestől 15°-kal eltérő bármely irányban 3 – esővel szembeni védettség és az esési szög a függőlegestől 60°-kal eltérő bármely irányban 4 – bármely irányból fröcskölt folyadék ellen 5 – vízsugárral szembeni védettség: bármely irányból sugárral 6 – hajó fedélzetén található körülményekkel szembeni védettség 7 – vízbemerítettség elleni védettség (1 m-ig) 8 – tartós víznyomás elleni védettség Üzemi körülményeknél a legkomolyabb védettség az IP65-ös! Sújtólég és robbanás
biztos kivitel: (MSZ 1600/8) a készülék működése, vagy hibás működése közben szikra keletkezésénél robbanás biztos környezet Biztosítása: (bányákban, üzemanyag tárolókban, műtrágyagyárban, ) - nyomásálló tokozás: a tokozás elnyeli a robbanási energiát - lemezes védőszerkezet: a lemezek a robbanási gázt lehűtik, így az további robbanást nem okoz - túlnyomásos szellőztetés: tiszta levegővel való szellőztetés - olaj elleni védelem: - túlnyomás alatti védelem: a készüléket egy dobozba helyezik, majd a dobozban nagyobb nyomást biztosítanak, így kívülről befelé nem megy a levegő - gyújtó szikra elleni védelem: (bizonyítvány szükséges) a konstrukció kialakítása olyan, hogy a keletkező szikra energiája kevés az adott légkör -4- Vezérléstechnika - - belobbanásához szükséges energiánál (a készülék tápellátását korlátozzák üres járási áram és feszültségkorlátozva van) Ez nem elég
védelem az induktivitások és kapacitások miatt, ezért nem tartalmazhatnak olyan tárolókat, amik ekkor energiát képesek tárolni! Zener - gát: galvanikus leválasztás: idegen, hálózatellenes feszültség nem juthat be a készülékbe optikai vezetés Vezérléstechnikai rendszerek szervei: Bemeneti szervek: • érzékelő szervek: kétállapotú jeleket adnak nyomásérzékelők: nyomás értéket mér, érzékel - membrános nyomáskapcsolók (már inkább félvezetős érzékelőket alkalmaznak) ’Kontakt – manométer’ hőmérséklet érzékelők: hőmérsékletet mér, érzékel - kontakt hőmérő - bimetál hőmérő (bimetálos hőrelé) elmozdulás és elfordulás érzékelők: pozíció érzékelése - mágneses és optikai érzékelők - reflexiós érzékelők - lineáris és körforgás érzékelők (plusz irányt is) - centrifugál kapcsolók szintérzékelők: valaminek a magasságát vagy szintjét érzékeli - kapacitív szintérzékelők - flyght
kapcsolók (úszós kapcsolók) • parancsadó szervek: olyan bemeneti egységek, amelyek a emberi üzeneteket kezelik nyomógomb: ’monostabil’ (elengedett állapot), megnyomásra nyit vagy zár A felületi egyenetlenség miatt nem csak egy jel keletkezik (prell-jelenség) - szűrővel vagy morse kapcsolóval ellátott - valamilyen algoritmuson alapuló szoftverrel irányított - mikrokapcsoló: egy előfeszített rugó van benne, ami nagyon gyorsan billen át a prell-jelenséget jól csökkenti; nem rendelkezik memóriával -5- Vezérléstechnika billenőkapcsoló: ’bistabil’ különböző állapotokba hozható, különböző üzemmódok kapcsolására, amik ebben az állapotban maradnak; rendelkezik memóriával Kimeneti szervek: • tranzisztoros: kis feszültségű, áramú bemenettel nagy feszültségű, áramú kimenetet tudunk vezérelni; fémes kapcsolat van, így nem tud galvanikus leválasztást biztosítani - open kollektoros: OC - totem pole-os: TP •
optocsatolós: két oldala között galvanikus leválasztást biztosít, mivel fénnyel viszi át az információt; a kimenet akár bemenetként is használható a leválasztás miatt -6- Vezérléstechnika • relék: ha az elektromágnesen (egyenáramú vagy váltóáramú) áram indul, akkor felmágneseződik és egy fémlapot vonz magához, ami valamilyen kapcsolót mozgat; galvanikusa leválaszt Jellemző adatai: - élettartam (105 – 107 kapcsolás) - rugónyomás - átmeneti ellenállás (pogácsák között, működés közben: 10-6 – 100 mΩ) - elektromos terhelhetőség (mekkora feszültség vagy áram kapcsolható rá) - érzékelővel kapcsolható maximális teljesítmény - tekercs névleges feszültsége vagy árama - érzékelők távolsága mm-ben - érintkezők típusa és darabszáma Időbeni karakterisztikája: - kisméretűek gyorsabbak - nagyméretűek lomhábbak Relé teljesítményének számítása: pl.: tekercs: 12 V ; 40 mA 480 mW kimenet: 250 V
; 10 A 2.5 kW 5000-szeres a teljesítmény tényező Morse – érintkezős relékkel logikai hálózatokat lehet tervezni. A relék nagyon elterjedtek sok oldalúságuk miatt. Általában tokozva vannak a porosodás miatt; vannak ferromágneses tokozások is. reed relék: a mozgó alkatrészeket tartalmazó részük is hermetikusan el van zárva a külvilágtól -7- Vezérléstechnika Tulajdonságai: ’mágneses tér’ érzékelésére is alkalmas vigyázni kell túláram esetén, mert ha egyszer összeégnek az érintkezői, akkor nem lehet már javítani - jól ellenáll a környezeti hatásoknak - nem túl gyorsak - morse – érintkezős kialakítás is létezik - agresszív környezet esetén a kivezetéseket is óvni kell tirisztor: félvezetős kapcsoló (’félvezető dióda’) két állapot: a tirisztor begyújt, ha a gate-re feszültséget kapcsolunk, az anód – katód részen áram kell, hogy folyjék; kikapcsol, ha az áram az anód – katód körben egy
bizonyos érték alá csökken - egyenáramú körben a vezérlő elektródára a megszakításnál negatív impulzust adnak - jó hatásfokú teljesítménykapcsolók, néhány volt és néhány mA-rel működnek: 200 – 400 V és 10 – 16 A-t is képesek kapcsolni hátrányai: - eléggé melegednek - nem választanak le galvanikusan - triac: - négy rétegű félvezető, és két irányban képes vezetni - négy módban lehet gyújtani - működése a tirisztoréhoz hasonló, de nem csak a gate oldali feszültségrákapcsolásra működik, hanem az A 1 és A 2 kivezetéseknél lévő feszültségváltozásra is beindulhat, ami nem mindig előnyös szilárd test relé: SSR - olyan mozgó kapcsoló, mely nem tartalmaz mozgó alkatrészeket - optocsatoló a galvanikus leválasztó és maga a kapcsoló egy triac - kis teljesítménnyel lehet vezérelni, a kimeneti oldalon pedig 15 – 20 A-os áramok is megjelenhetnek - áramnull átmenetnél old ki - túláramra vigyázni kell,
mivel nem lehet biztosítékkal megvédeni, csak speciális védelmi áramkörrel, ami viszonylag drága hátránya: - nem lehet javítani -8- Vezérléstechnika különleges relék: - a feszültség vezérelt reléket túlfeszültség védelmére alkalmazzák, de figyelni kell a relék ’lassúságára’ - áramrelék pedig túláram elleni védelemre szolgálnak ’kismegszakító’ túláram és rövidzár miatt - termikus túláram relék tartós túláram elleni védelem bimetál hőkioldót működtet; idővel ’elöregszik’ - többtekercses relék többváltozós logikai kapcsolat - ’emlékező, ejtő relék’ öntartású iker relé, számlálásra is képes volt, áramszünet esetén is ’emlékezett’ - polarizált relé csak megfelelő polaritásra kapcsol be - időrelé ellenálláson keresztül töltődik a kondenzátor (kis késleltetéshez), szinkron motoros késleltetés mágneskapcsolók: olyan, mint a relé, de sokkal nagyobb áramok
vezetésére alkalmas (250 – 400 V) - eltérő tekercsek esetén egyen és váltóáramra is alkalmazható - háromfázisra is - segédérintkezővel öntartóra is lehet állítani Járulékos készülékek, szervek: • hangjelzők: általában jól észrevehetők! (szirénák, kürtök, ) • fényjelzők: izzólámpa: ’üzemmód kijelzők’; törpefeszültséggel (48 V) üzemelnek érintésvédelem miatt; hideg és meleg hőmérsékleten nagyságrendi különbség az ellenállásában; jelentős fogyasztás glimm–lápa: ionizációs módon működik két fémlemez + valamilyen gáz = reakció esetén izzanak, de nagyon halványan; hosszú élettartam és minimális fogyasztás fényemittálós diódák: ’LED’ – félvezető; félvezetőn keresztül áramot vezetünk különböző színben világít, viszonylag jól láthatóan; kis fogyasztás; hosszú élettartam; sok felhasználási terület egyenirányító tulajdonsága miatt -9- Vezérléstechnika •
numerikus kijelzők: többlet információt biztosítanak 7 szegmenses kijelzők: 4*7-es pontmátrix: bonyolultabb vezérlésű, mint a 7 szegmenses 16 szegmenses alfa-numerikus kijelző: 7*5-ös pontmátrix: mixicsö: nagysebességű anódos és katódos gázkisüléses kijelző; nagy feszültséggel működött, külön tápfeszültséget igényelt; ma már nem alkalmazzák fényemittáló diódák: kis teljesítményűek; nem melegszenek; formálható pontmátrixok; nagyon elterjedt; hosszú élettartam folyadék kristályos kijelzők: LCD, nagyon energiatakarékos - szematikus - nematikus a folyadékra vetített fényt vagy átengedi (transzmissziós) vagy nem (reflexiós) két üveglemez között folyadék + polárszűrő váltakozó áramot használnak az elektrolízis elkerülése miatt nincs frissítési frekvencia CRT monitor: katódsugárcsöves • egyéb szervek: további járulékos szervek energia források és védelmi szervek: - tápegység érintésvédelem;
egyszerűbb kábelezés a szigetelés miatt - érintésvédelmi relé: ’φ-relé’ figyeli a fázisvezető és a nulla közötti áram értékét, és ha kell beavatkozik áramkülönbségre old le Számrendszerek és kódrendszerek: Valamely N szám (numerikus) az R alapú (radixú) számrendszerben deffiníciószerűen: n −1 N R = ∑ Ak * R k k =− h A legfontosabb számrendszerek és számjegyeik: Bináris (kettes) 0,1 Ternális (hármas) 0,1,2 Kvintális (ötös) 0,1,2,3,4 Oktális (nyolcas) 0,1,2,3,4,5,6,7 Decimális (tízes) 0,1,2,3,4,5,6,7,8,9 Duodecimális (12-es) 0,1,2,3,4,5,6,7,8,9,a,b Hexadecimális (16-os) 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F A digitális technikában a bináris számrendszer kiemelt jelentőségű. A bináris számrendszer egy-egy helyi értéke egy bit információt jelent. Eszerint egy 4 bites bináris szám egy 4 helyi értékű bináris számot jelent. A bináris szám legnagyobb súlyú - 10 - Vezérléstechnika bitjének helyét
MSB-vel (Most Significant Bit), a legkisebb helyi értékű bitjét LSB-vel (Least Significant Bit) jelölik: 27 20 1011001 ↑ ↑ MSB LSB Mivel a hétköznapokban leggyakrabban használt számrendszer a 10-es számrendszer, ezért a leggyakoribb feladat a decimális számrendszerbe és viszont történő konvertálás. konvertálás alatt valamely R 1 alapú számrendszerben megadott szám átszámítását értjük egy R 2 alapú számrendszerbe. Decimális-Bináris konverzió: (D B) Az adott decimális szám egész részét elosztjuk 2-vel, majd a kapott eredményt újból és újból elosztjuk 2-vel. Az eredményt a szám alá, a maradékot pedig a szám jobb oldalára húzott vonal mellé írjuk. Az osztást addig folytatjuk, amíg 0-t nem kapunk eredményül A maradékot alulról fölfelé olvasva az adott szám egész részének bináris megfelelőjét kapjuk. Az adott decimális szám tört részének bináris megfelelőjét ismételt kétszerezéssel kapjuk. A tizedesvessző
helyén húzott vonal bal oldalára 0-t írunk, ha a kétszerezéssel kapott erdmény 1-nél kisebb; és 1-et, ha nagyobb. Az utóbbi estben következő kétszerezés csak a szám tört részére vonatkozik. Az eljárást addig folytatjuk, amíg a tizedesvessző jobb oldalán csupa 0-s decimális jegyet nem kapunk. A leolvasás felülről lefelé történik Pl.: 497,3515625 10 497 1 ← 1 0, 3515625 248 0 ← 2 0 7031250 ← 1/2 124 0 ← 4 1 4062500 ← 1/4 62 0 ← 8 0 8125000 ← 1/8 31 1 ← 16 1 6250000 ← 1/16 15 1 ← 32 1 2500000 ← 1/32 7 1 ← 64 0 5000000 ← 1/64 3 1 ← 128 1 0000000 ← 1/128 1 1 ← 256 0 Tehát: 497,3515625 d 111110001,0101101 b Bináris-Decimális konverzió: (B D) A bináris-decimális konverzió legegyszerűbben a definíciós képlet alkalmazásával végezhető el. Bináris-Oktális konverzió: (B O) A bináris számjegyet a bináris vesszőtől jobbra és balra 3-as csoportokra osztjuk, s az így kapott triádok adják az oktális szám
egy-egy helyi értékét. 7 6 1 111│110│001 = 761 421 421 421 Bináris-Hexadecimális konverzió: (B H) A bináris és a hexadecimális számrendszer radixai közötti kapcsolat révén ez a konverzió a B O átalakításhoz hasonlóan végezhető el. A bináris szám számjegyeit - 11 - Vezérléstechnika a bináris vesszőtől indulva jobbra és balra négyes csoportokra (tetrádokra) osztjuk, majd ezen tetrádokat hexadecimális számokká alakítjuk. 1 F 1 1│1111│0001 = 1F1 1 8421 8421 Komplemens számok: Komplemens számon kiegészítő számot értünk. A leggyakrabban használt komplemens típusok és képzéseik: 10-es komplemens: N K10 = 10n-N 2-es komplemens: N K2 = 2n-N 9-es komplemens: N K9 = 10n-1-N 1-es komplemens: N K1 = 2n-1-N Egyes komlemens: Az aritmetikai műveletek végzése miatt fontosak a kettes számrendszerbeni komplemensek. -valamely pozitív bináris szám 1-es komplemensét a bináris helyi érték 1 0 ill. 0 1 cseréjével kapjuk
(a bináris számjegyeket tagonként invertáljuk) Kettes komplemens: Az eredeti számot a kettes számrendszerbeli ’kerek’ számra egészíti ki. Soros algoritmussal: az adott pozitív egész szám (N) legkisebb helyiértéke felöl, a legnagyobb felél haladva a nullákat és az első 1-es jegyet is változatlanul hagyjuk, de az összes többi helyiértéken invertálást végzünk. Párhuzamos algoritmussal: első lépésben előállítjuk az adott szám (N) egyes komplemensét (N K1 ), majd ehhez hozzáadunk egyet: N K2 = N K1 +1 Bináris számábrázolás digitális berendezésekben: A nagyságrend ábrázolására a fixpontos és a lebegőpontos ábrázolásmód terjedt el. Fixpontos számábrázolás: A fixpontos ábrázolás esetén a tizedesvessző a számot tartalmazó regiszterben előzetes megállapodás szerint rögzített helyen, rendszerint az első értékes jegy előtt van, vagyis minden szám csak 1-nél kisebb lehet. Lebegőpontos számábrázolás: Lebegőpontos
ábrázolásmód esetén a regiszter tartalmazza a szám normalizált értékét, mely a fixpontoshoz hasonlóan, valamilyen 1-nél kisebb szám ezt követően tartalmazza a szorzó 10 ill. 2 hatványkitevőjének előjel bitjét és a hatványkitevő értékét. Előjel ábrázolása: ’0’ az előjelbit pozitív ’1’ az előjelbit negatív Kódrendszerek: Alapfogalmak: • Kód: két szimbólumhalmaz egyértelmű egymáshoz rendelésének rendszere • Kódolás: a szimbólumok egymáshoz rendelése meghatározott szempontok szerint • Dekódolás: a kódolás ellentétes művelete – visszatérés az eredeti halmazra • Jelkészlet: azon jelek összessége, amelyeket a kódszavak felhasználásához alkalmaznak, meghatározott szabályok szerint - 12 - Vezérléstechnika • • • • • • • • Kódszó: a jelkészlet elemeiből meghatározott szabályok szerint felépített értelmes üzenet , egybefüggő jelsorozat Kódszó készlet: a kódolásra
meghatározott szabályok szerint felhasználható egybefüggő jelsorozatok összessége Tiltott kódszó: olyan kódszavak, melyek képezhetőek, de nem tartoznak az adott kódkészletbe Bit: az információ egysége Redundancia: valamely üzenetforrás ki nem használt információ mennyisége (az információnak csak egy része fontos nekünk) Relatív redundancia: Hamming-távolság: két kódszó között annyi, ahány kódelemet kell az ellenkezőjére változtatni az egyik kódszóban ahhoz, hogy a másik kódszót kapjuk Kód Hamming-távolsága: a kódszó készletének elemei között észlelt legkisebb Hamming-távolságot értjük A kódolt információ átvitele: A digitális technikában igen gyakori feladat az, hogy a berendezés egyik részéből a másik részébe, vagy egy távol lévő másik berendezésbe kell információt átvinni. Ez azt jelenti, hogy a kódolt jeleket meghatározott sebességgel egy adó-ból a vevő-be kell juttatni. Az átvitel a csatornán
történik, amely lehet villamos kábel, rádiófrekvenciás összeköttetés, fényvezető szál, pneumatikus vagy hidraulikus csőrendszer stb. Párhuzamos átvitel esetén egy-egy kódszó bitjeit egyidejűleg, külön csatornán továbbítjuk. Így az összes bit gyakorlatilag egy időben érkezik a vevőhöz Soros átvitel esetén az információ bitjeit egyenként, egymás után továbbítjuk ’egy’ vezetéken. - soros átvitel esetén fontos kérdés, hogy meddig tart az egyik bit és mikor kezdődik a másik, ezért szükség van bitszinkronizációra és karakterszinkronizációra - ha több karakter blokkba rendezve kerül továbbításra, el kell különíteni a blokkokat egymástól, ez a blokkszinkronizáció - továbbá a teljes üzenet elejének és végének ismerete az üzenetszinkronizáció által - a szinkronizáció legegyszerűbb módja külön szinkron vezeték kiépítése az adó és a vevő között (párhuzamos átvitelnél ez szokásos is, sorosnál csak
akkor, ha az adó és vevő közel van) Az időzítés szempontjából a soros átvitel lehet asszinkron és szinkron. - az asszinkron átvitelt START-STOP üzeműnek is nevezik, mert az ’adás’ mindig egy start jellel kezdődik és egy stop jellel fejeződik be - a bitszinkronizáció a start jellel indított, az adó bitfrekvenciájával azonos frekvenciájú ÓRA jellel valósítható meg a vevőben - az aszinkron átvitel nagy előnye, hogy a berendezések bizonyos mértékig egyszerűbbek és olcsóbbak, mivel az információt nem kell tárolni, de hátránya, hogy az átvivő csatorna nincs kellően kihasználva a hosszú szünetek miatt - a szinkron átvitel a lehető legjobb csatorna kihasználást teszi lehetővé, mivel ennél általában nem tartanak szünetet, a karakter sorozat blokkba van rendezve - a blokk szinkronizálást a blokk elején elhelyezett a szinkronkarakterekkel biztosítják, egyes rendszereknél az egyes blokkok között szünetet tartanak, az
aszinkron átvitelhez hasonlóan - a szinkron átvitelű berendezések általában drágábbak a járulékos buffer tárolók miatt - 13 - Vezérléstechnika Moduláció: Távolsági adatátvitelnél a csatornára kerülő digitális jelet át kell alakítani, modulálni kell. Mivel a csatorna mindkét végén lévő készülék lehet egyszerre adó és vevő is, ezért mindkét oldalon szükséges egy modulátor és demodulátor. Amplitúdó moduláció: (AM) a 0 ill. 1 értéket a nagyfrekvenciás vivő két különböző amplitúdó értéke reprezentálja; a modulált jelet burkológörbével látják el, amit szűrővel és egyenirányítással le lehet venni; igen zavarérzékeny Frekvencia moduláció: (FM ill. FSK-Frequency Shift Key) a két bit értéket a vivőhullám kétféle frekvencia értéke reprezentálja Fázismoduláció: a két bit értéket a vivőhullám kétféle fázishelyzete jelenti • RZ (Return to Zero): jellegzetessége, hogy minden bit után
visszatér 0-ra • NRZ (Non Return to Zero): a teljes bit ideig a jle bit értéke változatlan, tehát több egymás utáni 1-es nem különül el • Fáziskódolt jelátmenet (PE - Phase-encoded): az ugrás reprezentálja a biteket attól függően, hogy az átmenet milyen irányú 0 1 vagy 1 0. Mivel az információt itt is jelátmenetek reprezentálják, ezért ezt is a mágneses adatrögzítésnél használják Csomag továbbítás: ’címző’ (feladó); ’címzett’; ’irányítók’ szükségesek egyszerű rendszernél címzett, összetett rendszernél címző és címzett is fontos Csomagok tartalmazzák: cím; adatméret; adatszám; magát az adatot; ellenőrző karaktereket Számkódok, numerikus kódok: • Súlyozott (pozícionális) kódok: A pozícionális kód a kódszavak helyi értékéhez valamilyen valós számot (súly) rendel. Ilyenkor a kódszó információtartalmát rendszerint a kódszó egyeseinek megfelelő súlyok összege adja. k N ω = ∑Wi
S i i =1 • W i – súlyozás Si – 0 , 1 k – kódszó elemeinek száma BCD kódok: A száminformációk továbbítására leggyakrabban a binárisan kódolt decimális kódokat (BCD) használják. Tíz számjegy kettes számrendszerbeni ábrázolásához minimálisan 4 helyi értékre van szükség. Viszont a 4 változó lehetséges 16 kombinációjából csak 10-et használunk ki. - a decimális számok feldolgozásánál leginkább a normál BCD kódot (NBCD) alkalmazzák súlyozása: 8 4 2 1 - AIKEN feltöltése: mindig a kisebb helyi értékűeket tölti fel először, majd a kettesek közül mindig az elsőt súlyozása: 2 4 2 1 - STIBITZ (háromtöbbletes vagy élőnullás kód), minden értékhez 3-at kell adni WHITE itt is a kisebb helyi értékűt tölti fel először; súlyozása: 5 2 1 1 - 14 - Vezérléstechnika • Excess kódok: Az excess kódok közvetetten súlyozott kódok. A szám képzése: k Nω = • ∑W S − e i =1 i i q e; q : két
különböző szám, a kódolástól függően kell megadni STIBITZ, ha e = 3 ; q = 1 NIDDING, ha e = 5 ; q = 2 DIAMOND, ha e = 6 ; q = 27 Hibafelfedő és javító kódok: Az előzőekben ’zajmentes’ csatornákat feltételeztünk, de ’zajos’ csatorna esetén a küldött kódszó megváltozhat, azaz a kódszóban 0 1 vagy 1 0 csere jöhet létre. A gyakorlatban annak a legnagyobb a valószínűsége, hogy csak egy helyen változik meg a kódszó. - Egyetlen hiba ún. paritásos ellenőrzéssel felfedhető: azaz minden kódszóval még egy ellenőrző helyi értéket (paritás bit) is átviszünk a csatornán. Ennek értékét úgy választjuk meg, hogy a teljes kódszó az ellenőrző helyi értékkel együtt páros vagy páratlan 0-kat ill. 1-eseket tartalmazzon Ezt a járulékos helyi értéket paritás bitnek nevezik. A TTL rendszerben a paritás bit előállítása, ill. ellenőrzése az SN 74180 típusú bővíthető 8 bites áramkörrel könnyen elvégezhető. A
paritásos ellenőrzést igen gyakran alkalmazzák, mert így tetszőleges kódtípus felruházható hibafelfedő képességgel. A paritás generátor figyeli az adó kimeneteit és előállítja a paritás bitet, amivel kiegészíti az átviendő jelet. A vevő oldalon a paritás vizsgáló figyeli a kiegészített információt és ha nem megfelelő számú 1-est észlel, akkor jelzést ad. - Egyszerűbb hibafelfedő áramkört igényelnek az aránykódok. Ezek alapvető jellemzője, hogy az egyes kódszavakban szereplő 1-esek és 0-k aránya állandó. A leggyakrabban használt aránykód a 7-4-2-1-0 súlyozású. - WALKING-kód - 7-4-2-1-0-kód - 8-4-2-1-0-kód - LORENZ-kód - 10-ből 1 –kód - 7-ből 1 –kód - HAMMING-kód A hibafelfedés feltétele, hogy a Hamming-távolság (D) egynél nagyobb legyen. Ha ugyanis a két küldött kódszó között a H.-távolság 1, akkor egy hiba a másik kódszó t is eredményezheti. Maximálisan D-1 hiba fedhető fel Az eddigiekben csak
a hiba létének kimutatásával foglalkoztunk. A hiba javításához a hiba helyét is ismerni kell. - A hibajavítást blokkszerű adatátvitel estén sor- és oszlop paritás ellenőrzésével is elvégezhetjük. Ha az adó kódszavait szisztematikusan egymás alá írva képzeljük el, akkor egy-egy paritás bitet minden sorhoz és minden oszlophoz rendelhetünk. Ily módon egyetlen hiba a hibás sor és oszlop metszéspontjában van. Így tudjuk a hiba helyét, tehát értékcserével (0 1 vagy 1 0) a hiba javítható. - 15 - Vezérléstechnika Alfanumerikus kódok: • Telex kód: 5 bites alfanumerikus kód, mivel az 5 sáv csak 25 = 32 variációs lehetőséget nyújt, ezért külön kell gondoskodni a betűk és a többi jel kódolásáról • ASC kód: 7 bitesnek indult, de 8 bites lett, így minden karakter belekerült a karaktereket rekordokban kódolják; minden rekord egy :-tal kezdődik CRC – ciklus ellenőrző összeg (kódkulcs: 8 bites szám) 1: ex-or
művelet 0: nincs művelet a kódpolinómot lehet variálni bonyolult előállítás viszonylag megbízható nem tudja a hibát javítani az ellenőrző számításnál mindig 0-át kell kapni Soros adatátviteli rendszerek: A soros adatátvitelhez csak kevés összekötő vezeték kell. Nagy távolságú összeköttetéseknél ez az előny különösen fontos. A párhuzamos átvitel költségessége és a soros gyors fejlődése miatt a soros átvitelnek egyre nagyobb a létjogosultsága. A soros adatátvitel fő problémája az adó és vevő szinkronizálása. Többféle szabványosított adatátviteli rendszer van: • 1 – Wire: RTM aszinkron - DS-1420 minden darab különálló kódot (hivatkozási kód) tartalmaz - erős protokollos rendszer szerint működnek - 16 - Vezérléstechnika • • • • - a kommunikációban a μs-nyi szünetek jelentik a 0 ; 1 –eket - ha egyszerre több eszköz van a buszon, akkor egy ’search-rom’ paranccsal azonosítja azokat:
1. az utasítás után minden eszköz kirakja az azonosító jel első bitjét a buszra 2. az összes egység kirakja a 0 bitjének az inverzét a buszra 3. a master egység eldönti az érvényest a két bit alapján, majd ezt elküldi, ezzel kijelöli azokat, amelyekkel foglalkozni fog SPI – busz: szinkron - a master órajellel vezérel - nincsen adatvédelem - csak adat olvasásra alkalmas - ’data in’ és ’data out’ vezetékek kellenek olvasásra és parancs adásra két párhuzamos vezeték, ami gyorsabbá, de jelentősen bonyolultabbá teszi - ~2 – 2,5 Mbit/sec 2 IIC ; I C – busz: szinkron - folyamatirányító vagy adatgyűjtő rendszerekre jól alkalmazható - adatvezeték két irányra: ’serial clock’ ; ’serial data’ - master – slave kapcsolat van az eszközök között - mindig a master generálja az órajelet (magas szint), de a master jelleget más is átveheti - nincsen ellenőrzés, csak adatforgalom - zavarszűréssel rendelkezik - két vezeték
szükséges kis távolságra alkalmazható - start – stop parancsok - eszköz maximális kapacitása: 400 pF - ~400 kbit/sec RS 232 – busz: aszinkron; (full simplex) - iparban is használják 10 – 15 m-re, de egyes változatait akár 45 m-re is - hosszú vezeték estén zavarérzékeny - általában csak két eszköz összeköttetésére használják - meghatározott sebességgel kommunikál, amit szabályoznak és irányítanak - az átvitel során: start –stop; adatbit (8 bit); paritás bit átvitele történik, amiket még programozni is lehet - 2 interfészes adatátvitel: TXD (Transmit Data), RXD (Receive Data) és más (RTS, CTS, DSR, DTR, DCD) vezérlőjeleket használnak - jelszint: ± 24 V ; a tiltott sáv: ± 3 V - igen elterjedtek A nagyobb távolságú adatátvitelhez feltétlenül szükséges a potenciálválasztás, hogy a zavarjelek hatását elnyomjuk. Ilyen tulajdonságú az áraminterfész rendszer, mely áramhurok vagy current-loop néven is ismert. - a
két készülék csatolásánál az adó- és a vevőoldalon zárjuk a hurkot - a hurokba 20 mA áramot táplálunk be, amire egyszerűen egy +12 V-ra kötött ellenállást használunk - a logikai 1 megfelel az áramnak, a logikai 0 pedig az árammentes esetnek - a vezeték hossza maximálisan 1000 m lehet - 300 kbit/sec – 2Mbit/sec –ig változhat az adatátviteli sebesség elektromos kialakítás szerint RS 485 – busz: - potenciál különbségen alapuló kommunikáció - 17 - Vezérléstechnika • • - kétvezetékes busz, de csak egyirányú kommunikáció van - sodort érpárral kell működtetni, mivel így a zavaró jelek szimmetrikusan változtatják meg a jelet nem igazán zavarérzékeny - a csatlakoztatható eszközök száma nincs korlátozva - viszonylag nagy távolságú adatátvitelre alkalmas, akár 1200 m - ismétlő áramkörökkel az áthidalandó távolságot még lehet növelni RS 422 – busz: (full duplex: 2-2 vezeték az egyiken adatot kap a
másikon vezérel) - fizikai felülete ugyanolyan, mint az RS 485-ösé - galvanikus leválasztásra alkalmas ( 100-tól néhány száz Ohm-ig szokták lezárni a vezeték két végét) - viszonylag nagy távolságú adatátvitelre alkalmas - az adatátviteli sebesség növekedésével csökken az áthidalható távolság és az átvitel pontossága - 250 kbit/sec – 2,5 Mbit/sec CAN – busz: Car Area Network Controller Area Network - nagysebességű átvitelre képes: 1 Mbit/sec – maximálisan 40 m-re - az autókban három különböző sebességű buszrendszer van: 1. biztonsági rendszert összekötő leggyorsabb 2. autó vezérlő egységeit összekötő közepes 3. kényelmi rendszert összekötő alacsony - BASIC – can: 11 bites rendszer PELI – can: 29 bites rendszer - buszarmitáció van a buszon - szignifikáns bitek vannak: domináns: 0 ; receszív: 1 - azonosító kódokat is küldözgetnek, amikkel prioritást is meg lehet állapítani - a csomag hosszúsága
kötött: 8 byte maximálisan - csak az üzeneteket azonosítják, a vevő oldalon megvan, hogy melyik milyen kódú adatot dolgozhat fel Master – Slave viszony a buszon: - master irányít - egyszerre csak egy master lehet, slave-ekből több is - a master osztja ki, hogy mikor melyik aktív - mindenkinek van ’master’ joga, meghatározott szabályok szerint - a jelenlegi master lemondhat jogáról, ilyenkor más veszi át a szerepét, ez így megy mehet tovább, de az átvevést vissza kell igazolni, csak akkor adható át ténylegesen a jog - a master a jog átadását általában több irányba is megvalósíthatja, hogy biztosan legyen olyan eszköz, amelyik biztosan át tudja majd venni - a slave-ekben van egy időzítő, ami számlálja, hogy neki mikor kell majd sorra kerülnie - 18 - Vezérléstechnika - a master kimaradása esetén a slave-ek figyelik a hálózatot, hogy van-e adatforgalom és figyelik az időzítőjüket, majd próbálkoznak master-ré előlépni
csökken a rendszer eszközigénye az esetleges hibák esetén nő a megbízhatóság Processzoros rendszerek: A 8 bites processzorokról általában: Processzorok belső felépítése: • ALU (Arithmetic Logic Unit): legfontosabb rész; az utasításokban meghatározott aritmetikai és logikai műveleteket hajtja végre - Akkumulátor: egy speciális funkciójú 8 bites regiszter, amely forrás és eredményregiszterként egyaránt tekinthető. Az aritmetikai és logikai műveletek egyik operandusa szinte mindig az akkumulátorban van és az eredmény ugyancsak itt képződik - Utasításszámláló regiszter (Program Counter – PC): amely mindig a soron következő utasítás memóriabeli címét tartalmazza, direktben nem írható át a tartalma - Veremmutató (Stack Pointer – SP): egy speciális regiszter, amely a veremtár legfelső elemének címét tartalmazza. A veremtároló az adatmemória (RAM) egy lefoglalt területe. Adatokat csak a verem tetejére lehet tenni és
csak onnét lehet levenni „utoljára be, elsőre ki” (Last-In-First-Out = LIFO) memória kezelés. A stack pointer mindig arra a helyre mutat, ahová a következő adatot elhelyezi. - Állapotregiszterek (Flag regiszter): ún. jelzőbitek ill más vezérlő, ellenőrző biteket tartalmaznak: Z flag (zérus); S flag (sign = előjel); P flag (parity = paritás); C flag (carry = átvitel); AC flag (auxiliary carry = segéd átvitel) - Általános célú regiszterek: - 19 - Vezérléstechnika • • • • • Utasítás végrehajtása a processzoron belül: A működése ciklikus: utasítás lehívás; végrehajtás; lehívás; végrehajtás . Ezt a pontos sorrendiséget a rendszeróra vezérli. A legelemibb időegység a gépi állapot, amely rendszerint egy órajel periódusa alatt játszódik le. Általában több gépi állapot alkot egy gépi ciklust. A gépi ciklus egy összetettebb műveletet jelent. Egy utasítás lehívásának és végrehajtásának együttes
műveletét utasítás ciklusnak mondjuk. Az utasítás végrehajtás folyamata: utasítás előkészítés, lehívás (fetching) a programszámláló tartalmának növelése a műveleti kód (operation code) értelmezése a művelethez szükséges adatok előkészítése utasítás végrehajtása (executing) az eredmény elhelyezése az előírt helyre az utasítás-feldolgozási ciklus újra kezdése Utasítások hossza a processzoron belül: A számítógép utasításainak hossza lehet rögzített fix érték, ill. változó hosszúságú. Az utasítás szerkezete határozza meg, hogy a processzornak az utasítás mely részét hogyan kell értelmeznie. Értelmezés szempontjából az utasítások 3 fő részre oszthatók: műveleti kód; címrész; módosító rész. Címzési módok: processzortól függően sok fajtája van: - Közvetlen, direkt címzés: az utasításban maga a tárolóhely cím szerepel - Abszolút címzés: a tényleges címet tartalmazza az utasítás;
nem kell sokat számolni - Relatív címzés: valamilyen alapcímhez viszonyított címet tartalmaz az utasítás; rövid, de egy kicsit kell számolni - Bennfoglalt címzés: olyan címzés, amely nem tartalmaz címet, mivel azt a műveletet csak pontosan egy eszköz hajthatja végre - Közvetett, indirekt címzés: az operandus az utasításban megcímzett tárolóhelyen megadott memória címen van - Indexelt és indirekt címzés: indirekt módon adom meg a címet, de még valamilyen kiegészítéssel megtoldom Szubrutin, szubrutin hívás, makrók: - Szubrutin: alprogram az ismételten előforduló feladat részek programozásának hatékony eszköze, egy olyan önálló funkciójú utasítás sorozat, amely egyszer szerepel a programban (rendszerint a program végén helyezik el), de a feladat elvégzésekor többször lehet használni. A szubrutinok egymásba ágyazhatók Alkalmazni általában egy vezérlő-átadó programmal lehet, amelynek ’return’ a vége, amivel
visszatér főprogramhoz (’call’ meghívás esetén a hívással mindjárt a program futási állapotának eggyel későbbi (n+1) állapotát tárolja a stack-ben, majd a szubrutin lefutása után a ’return’ a stack-ből egyből az n+1edik állapotot olvassa ki) - Makró: a hívás helyén kerülnek a program memóriába és annyiszor, ahányszor hívás történik, ennél fogva a makrók használata akkor célszerű, ha kevés számú utasításból állnak. A makrók tartalmazhatnak szubrutinokat is Megszakítás: A megszakítási események kapcsán különbséget kell tenni a többnyire külső eredetű megszakítások és az utasítások szabályszerű végrehajtását megállító kivételek között. - 20 - Vezérléstechnika • A szoftver megszakítási kérelmek azok, amelyek programból lettek kezdeményezve, nem maszkolhatók. A hardver megszakítási kérelmek többsége maszkolható, de van nem maszkolható is. A megszakítások kiszolgálásakor több
olyan kérdés van, amit a rendszernek meg kell oldania: - a megszakítási kérelem helyének megállapítása (melyik eszköz kezdeményezte a megszakítást) - a megszakítások prioritásának meghatározása, azaz a megszakítási sorrend felállítása, több, egy időben jelentkező kérelem esetén - egyes eszközök ideiglenes kizárása a megszakítási procedúrából - többszörös megszakítás kiszolgálás megoldása A megszakítási kérelem keletkezési helyének megállapítására egy megszakítási vonal esetén két módszer alkalmazható: - szoftver módszer esetén a lekérdezéses megszakításkezelés - hardver módszer esetén a megszakítás vezérlő alkalmazása Több megszakítási vonal esetén, amikor minden eszköz saját megszakítást kérő vezetékkel rendelkezik a legáltalánosabban használt a vektor módszer. DMA (Direct Memory Acces): Közvetlen memória hozzáférés: Egy regisztert felprogramozunk, hogy mit; honnan és hova vigyen el. A
processzortól engedélyt kér a feladat végrehajtására, meghatározott módon prioritás szerint megkapja. Ettől kezdve ő irányítja a szükséges rendszerfolyamatokat, amiket nagy sebességek képes végezni. Eközben a processzor más folyamatokat tud felügyelni, ami jelentős időmegtakarítást tesz lehetővé. A folyamat befejeztével visszaadja az irányítást a processzornak Memória: A félvezető alapú memóriák a mai digitális berendezések nélkülözhetetlenelemei. Funkció szerint két nagy csoportba sorolhatók: • RAM memóriák (Random Access Memories) • ROM memóriák (Read Only Memoties) RAM memóriák: A közvetlen, tetszőleges hozzáférésű, változtatható tartalmú, írható, olvasható (R/W) memóriák. A RAM memóriák készülhetnek bipoláris, ill MOS technológiával Bipoláris technikával csak Statikus (SRAM), MOS technikával statikus ill. Dinamikus (DRAM) egyaránt készíthető. - az SRAM-ban az információt egy címzési, írási,
olvasási logikával kiegészített eszköz (RSFF) tárolja - a DRAM esetében a vezérlő elektróda és az alapréteg közötti kapacitás tárolja az információt töltés formájában - a CMOS SRAM-okat ellátják egy tartalék üzemmóddal (standby), ilyenkor igen alacsony a teljesítményfelvétel, az információt megtartja, de írás, olvasás nem lehetséges - kikapcsolás esetén az adatok elvesznek ROM memóriák: Ebbe a csoportba csak kiolvasásra szánt memóriák tartoznak - maszkprogramozott ROM gyárilag programozott ROM - PROM elektromosan programozható és nem törölhető - EPROM elektromosan programozható és UV fénnyel törölhető - 21 - Vezérléstechnika - EEPROM elektromosan programozható és törölhető, de a törlés rendszerint bájtonként történik Flash EPROM E2PROM, amely nem törölhető bájtonként, hanem chipenként EAROM elektromosa programozható és törölhető, működése az E2PROM-hoz hasonló Memóriák lábkiosztásai:
lábkiosztás szempontjából kompatibilisek! - adatbusz: 8 bit 8 adatvonal 16 bit 16 adatvonal - címbusz: minél nagyobb a memória, annál szélesebb lehet a címbusz - vezérlőbusz: van olyan, amit csak olvasnak OE: output enable + CE: chip eable (engedélyező) író és olvasó memóriák esetén külön-külön kell láb a kettőnek RD: read ; WR: write Memóriák bővítése: A memóriák bővítésére akkor van szükség, ha az egy tokban lévő tárkapacitás nem elegendő az adott feladat megoldásához: • címhossz szerinti bővíthetőség: a CE bemenetek tiltásával és a három állapotú kimenetek összekötésével érhető el • adathossz szerinti bővíthetőség: a címvezetékeket párhuzamosan kötjük - 22 - Vezérléstechnika Mikrokontrollerek: Processzor mag és ROM + RAM típusú memória; megszakítás vezérlők (külső megszakítást is képes kezelni); timer-ek; időzítők; egységszámlálók; I/O periféria; A/D – D/A átalakítók
’watch-dog’ áramkörök: ’újraindítható monostabil multivibrátor’ Lábkiosztás: EA: szoftveresen felül lehet bírálni PSEN: külső memóriából való olvasáskor aktív Multiplexer címbuszt raknak a processzorhoz mindig a címbusz állapota megy ki először - 23 - Vezérléstechnika Processzor belső lábkiosztása: Számláló, időzítő egység: (részletesen: 1992. Rádiótechnika évkönyvben) - 24 - Vezérléstechnika Timer1 – soros port regisztere vagy órajel generátora Tr - betöltés M0 , M1 – 4 féle üzemmód: 0 – 0 örökölt üzemmód; 8 bites számláló, regiszter 1. 16 bites regiszter ( L ; H ) 2. 8 bites időzítő, számláló (TL); TH automatikusan újratölt 1 – 1 TL-0 8 bites időzítő (Timer 0); TH-0 8 bites regiszter (Timer 1) Soros port: alapesetben 1db a kontrollerben LX –TX-es vonal (elvileg egyidejűleg advesz) adatátviteli sebesség timer-rel programozható fel 4 db üzemmód a Sereal Control-ban (vezérlő
egység): m. 0: szinkron adatátviteli kód 8 bit (adat) közlekedik adó – vevő-nél megszakító byte m. 1: 10 bitet visz át (Baud-rate változtatható) TX – adás ; RX – vétel strat – stop bitek m. 2: 12 bitet visz át +paritás bit (páros) programozható m. 3: megegyezik m 2-vel Timer1, Timer2 adja a BAUD-rate-et az órajel fix és változtatható is lehet Megszakítás rendszer: - két külső megszakító (van olyan, ahol 6 db külső van) int.0 , int1 szintre vagy élre legyen aktív - két Timer + külön-külön megszakító - 2db Receive Trasmitter mindegyiket külön-külön le lehet tiltani és van ’globális’ megszakító bit, amely a többit nem állítja el, csak megkönnyíti a műveletet Prioritás: - alacsony megszakítási szinten: csökkenő sorrendben: int.0; t0; int1; t1; soros; t2 (ha van) - magas megszakítási szinten: itt nincs sorrend, hanem amelyik ide kerül, az mind fontosabb a többinél; itt mindegyik egyenlő, csak időrendi sorrend
van - 25 - Vezérléstechnika Fogyasztás: - a frekvenciától erősen függ ’power down’ ; ’idle’ üzemmód takarékos üzemmód külső megszakítással lehet takarékos üzemmódból visszahozni takarékos üzemmódban megmaradnak a kimeneti portok állapotai (nincs adatvesztés!) - 26 -
figyelembe vett zavaró tényezőkkel számolunk • a vezérlés eredménye csak diszkrét digitális jel Diszkrét digitális jel: (kétváltozós jel) – eldöntendő kérdések sorozata • alacsony logikai szint: ’igaz’ • a földpont biztos stabil pont – ezért ez az igaz • a feszültség állandóan változik, így nem célszerű a magas szintet az ’igaznak’ választani Vezérléstechnikai elemek és szervek: Érzékelő és parancsoló szervek: • érzékelő szerv: technológiáról sereznek információt • parancsoló szerv: ember irányítja • logikai szerv: az egész rendszer működtetője • beavatkozó szerv: • végrehajtó szerv: • járulékos szerv: az egész rendszerről ad információt számunkra Különleges segédenergiás szervek: • villamos rendszer • pneumatikus rendszer • hidraulikus rendszer Eszközökkel szemben támasztott követelmények: • sugárzással szembeni védelem (illetve olyan alkatrészek alkalmazása, amelyek
közömbösek erre) • az alkatrészek élettartama (relék, tekercsek, ) nehéz üzemi körülmények: • mechanikaihatás • vegyi hatás • hőhatás Védettségi módok: • felhasználókkal szembeni védelem • ipari folyamatoknál a különböző felhasználási területeken egyéb más védelem (szigetelések és egyéb közegek kialakítása vagy a feszültségek módosítása) Bemeneti szervek: • érzékelő szervek: nyomásszabályozók, nyomásérzékelők: -analóg jelek helyett már digitális jelek alkalmazása a meghibásodás elkerülésére -az adott területtől, közegtől és a mérés tartományától függ a felhasználás módja hőmérsékletérzékelők: -a mérési tartomány fontos -különböző mérési módok forgásérzékelők: -2- Vezérléstechnika szintérzékelők: parancsoló szervek: ’alapjelek’ nyomógombok, kapcsolók, • beavatkozó szervek: relék – galvanikus leválasztást tesznek lehetővé • Segédenergiák:
villamos: + akár nagy távolságokra is (km-ekre) + könnyű vele a műveletvégzés + gyors működés + kis súly és méret + rezgésre nem érzékeny + energiaforrása megoldott - működés közben melegedés lép fel - tűz és robbanásveszélyes - érintésvédelem szükséges - karbantartása szaktudást igényel pneumatikus: + robbanás és tűzbiztonság + üzem közben nem melegszik + kis méret és súly + megfelelő kezelés mellett nagy üzembiztonság + alacsony karbantartási költségek + rázkódásra, sugárzásra nem érzékeny + a levegő a rendszer bármely pontján kiengedhető a szabadba + 0 – 3000 N erő kifejtésére alkalmas - zajos működés - villamos rendszerhez képest lassú - jeltovábbítás maximum 300 m - bonyolult csőhálózat kiépítése - táplevegőt elő kell állítani - karbantartása szaktudást igényel (olajozás szükségessége ???) - táplevegő tisztaságára érzékeny (por, páratartalom, olaj, ) hidraulikus: a jeltovábbító
rendszerhez nem ’savas’ olajra van szükség! + kezelés, karbantartás igen egyszerű + a munkafolyamatban használt olaj egyben kenés is + a jeltovábbító rendszer összenyomhatatlan, így a jelátvitel igen gyors + nagy erőhatásra képes (a rendszerben lévő olaj 150 – 200 bar-on működik) daruk, présgépek, emelők, . - bonyolult csőhálózat kiépítése az olaj oda – vissza vezetéséhez (két olajvezeték!) - az olajvezeték érzékeny a tömítetlenségre - az olajt meghatározott időnként cserélni kell, ami igen szennyező - tűzveszélyes Vezérléstechnikai rendszerekkel támasztott követelmények: Üzembiztonság: az eszköz egész rendszere működőképes -3- Vezérléstechnika Megbízhatóság: valószínűségi változó (0 – 1); egy alkatrész bizonyos időn belül meghibásodás nélkül működik jól számszerűsíthető Élettartam: olyan készülékeknél fontos, amelyek üzemszerű elhasználódásúak működés során kopás,
lép fel; ennek előre jól megtervezhetőnek kell lennie ( TMK: tervszerű megelőző karbantartás – szervizciklus) Nehéz üzemi körülmények: vegyipari, kohászati, élelmiszeripari, tevékenységekben üzemelő alkatrészekkel szemben támasztott követelmények eltérnek a hagyományostól (nedvesség, korróziót gyorsító vegyületek, por, magas hőmérséklet,) Védekezés: tokozás (tokozás ↔ hőmérséklet probléma: megfelelő tisztaságú szellőztetés - ’túlnyomásos szellőztetés’) Védettségi módok: a készüléket milyen módon kell a külső hatásoktól védeni; ezt a védettségi módot szabvány rögzíti: pl.: MSZ 806/1-76 IP XY: X – berendezés védettsége szilárd idegen test behatása ellen Y – berendezés védettsége folyadék behatása ellen X: 0 – 6-ig: 0 – nincs védettség 1 – nagyméretű testek behatása elleni védettség (emberi test – de nem szándékos) 2 – közepes méretű testek behatása elleni védettség (ujjak
ellen) 3 – kisméretű testek behatása elleni védettség (2,5 mm-nél vastagabb testek ellen) 4 - kisméretű testek behatása elleni védettség (1 mm-nél vastagabb testek ellen) 5 – káros méretű por behatása elleni védettség 6 – por behatása elleni védettség Y: 0 – 8-ig: 0 – nincs védettség 1 – vízcseppek lecsapódása elleni védettség 2 – vízcseppek lecsapódása elleni védettség, de az esési szög a függőlegestől 15°-kal eltérő bármely irányban 3 – esővel szembeni védettség és az esési szög a függőlegestől 60°-kal eltérő bármely irányban 4 – bármely irányból fröcskölt folyadék ellen 5 – vízsugárral szembeni védettség: bármely irányból sugárral 6 – hajó fedélzetén található körülményekkel szembeni védettség 7 – vízbemerítettség elleni védettség (1 m-ig) 8 – tartós víznyomás elleni védettség Üzemi körülményeknél a legkomolyabb védettség az IP65-ös! Sújtólég és robbanás
biztos kivitel: (MSZ 1600/8) a készülék működése, vagy hibás működése közben szikra keletkezésénél robbanás biztos környezet Biztosítása: (bányákban, üzemanyag tárolókban, műtrágyagyárban, ) - nyomásálló tokozás: a tokozás elnyeli a robbanási energiát - lemezes védőszerkezet: a lemezek a robbanási gázt lehűtik, így az további robbanást nem okoz - túlnyomásos szellőztetés: tiszta levegővel való szellőztetés - olaj elleni védelem: - túlnyomás alatti védelem: a készüléket egy dobozba helyezik, majd a dobozban nagyobb nyomást biztosítanak, így kívülről befelé nem megy a levegő - gyújtó szikra elleni védelem: (bizonyítvány szükséges) a konstrukció kialakítása olyan, hogy a keletkező szikra energiája kevés az adott légkör -4- Vezérléstechnika - - belobbanásához szükséges energiánál (a készülék tápellátását korlátozzák üres járási áram és feszültségkorlátozva van) Ez nem elég
védelem az induktivitások és kapacitások miatt, ezért nem tartalmazhatnak olyan tárolókat, amik ekkor energiát képesek tárolni! Zener - gát: galvanikus leválasztás: idegen, hálózatellenes feszültség nem juthat be a készülékbe optikai vezetés Vezérléstechnikai rendszerek szervei: Bemeneti szervek: • érzékelő szervek: kétállapotú jeleket adnak nyomásérzékelők: nyomás értéket mér, érzékel - membrános nyomáskapcsolók (már inkább félvezetős érzékelőket alkalmaznak) ’Kontakt – manométer’ hőmérséklet érzékelők: hőmérsékletet mér, érzékel - kontakt hőmérő - bimetál hőmérő (bimetálos hőrelé) elmozdulás és elfordulás érzékelők: pozíció érzékelése - mágneses és optikai érzékelők - reflexiós érzékelők - lineáris és körforgás érzékelők (plusz irányt is) - centrifugál kapcsolók szintérzékelők: valaminek a magasságát vagy szintjét érzékeli - kapacitív szintérzékelők - flyght
kapcsolók (úszós kapcsolók) • parancsadó szervek: olyan bemeneti egységek, amelyek a emberi üzeneteket kezelik nyomógomb: ’monostabil’ (elengedett állapot), megnyomásra nyit vagy zár A felületi egyenetlenség miatt nem csak egy jel keletkezik (prell-jelenség) - szűrővel vagy morse kapcsolóval ellátott - valamilyen algoritmuson alapuló szoftverrel irányított - mikrokapcsoló: egy előfeszített rugó van benne, ami nagyon gyorsan billen át a prell-jelenséget jól csökkenti; nem rendelkezik memóriával -5- Vezérléstechnika billenőkapcsoló: ’bistabil’ különböző állapotokba hozható, különböző üzemmódok kapcsolására, amik ebben az állapotban maradnak; rendelkezik memóriával Kimeneti szervek: • tranzisztoros: kis feszültségű, áramú bemenettel nagy feszültségű, áramú kimenetet tudunk vezérelni; fémes kapcsolat van, így nem tud galvanikus leválasztást biztosítani - open kollektoros: OC - totem pole-os: TP •
optocsatolós: két oldala között galvanikus leválasztást biztosít, mivel fénnyel viszi át az információt; a kimenet akár bemenetként is használható a leválasztás miatt -6- Vezérléstechnika • relék: ha az elektromágnesen (egyenáramú vagy váltóáramú) áram indul, akkor felmágneseződik és egy fémlapot vonz magához, ami valamilyen kapcsolót mozgat; galvanikusa leválaszt Jellemző adatai: - élettartam (105 – 107 kapcsolás) - rugónyomás - átmeneti ellenállás (pogácsák között, működés közben: 10-6 – 100 mΩ) - elektromos terhelhetőség (mekkora feszültség vagy áram kapcsolható rá) - érzékelővel kapcsolható maximális teljesítmény - tekercs névleges feszültsége vagy árama - érzékelők távolsága mm-ben - érintkezők típusa és darabszáma Időbeni karakterisztikája: - kisméretűek gyorsabbak - nagyméretűek lomhábbak Relé teljesítményének számítása: pl.: tekercs: 12 V ; 40 mA 480 mW kimenet: 250 V
; 10 A 2.5 kW 5000-szeres a teljesítmény tényező Morse – érintkezős relékkel logikai hálózatokat lehet tervezni. A relék nagyon elterjedtek sok oldalúságuk miatt. Általában tokozva vannak a porosodás miatt; vannak ferromágneses tokozások is. reed relék: a mozgó alkatrészeket tartalmazó részük is hermetikusan el van zárva a külvilágtól -7- Vezérléstechnika Tulajdonságai: ’mágneses tér’ érzékelésére is alkalmas vigyázni kell túláram esetén, mert ha egyszer összeégnek az érintkezői, akkor nem lehet már javítani - jól ellenáll a környezeti hatásoknak - nem túl gyorsak - morse – érintkezős kialakítás is létezik - agresszív környezet esetén a kivezetéseket is óvni kell tirisztor: félvezetős kapcsoló (’félvezető dióda’) két állapot: a tirisztor begyújt, ha a gate-re feszültséget kapcsolunk, az anód – katód részen áram kell, hogy folyjék; kikapcsol, ha az áram az anód – katód körben egy
bizonyos érték alá csökken - egyenáramú körben a vezérlő elektródára a megszakításnál negatív impulzust adnak - jó hatásfokú teljesítménykapcsolók, néhány volt és néhány mA-rel működnek: 200 – 400 V és 10 – 16 A-t is képesek kapcsolni hátrányai: - eléggé melegednek - nem választanak le galvanikusan - triac: - négy rétegű félvezető, és két irányban képes vezetni - négy módban lehet gyújtani - működése a tirisztoréhoz hasonló, de nem csak a gate oldali feszültségrákapcsolásra működik, hanem az A 1 és A 2 kivezetéseknél lévő feszültségváltozásra is beindulhat, ami nem mindig előnyös szilárd test relé: SSR - olyan mozgó kapcsoló, mely nem tartalmaz mozgó alkatrészeket - optocsatoló a galvanikus leválasztó és maga a kapcsoló egy triac - kis teljesítménnyel lehet vezérelni, a kimeneti oldalon pedig 15 – 20 A-os áramok is megjelenhetnek - áramnull átmenetnél old ki - túláramra vigyázni kell,
mivel nem lehet biztosítékkal megvédeni, csak speciális védelmi áramkörrel, ami viszonylag drága hátránya: - nem lehet javítani -8- Vezérléstechnika különleges relék: - a feszültség vezérelt reléket túlfeszültség védelmére alkalmazzák, de figyelni kell a relék ’lassúságára’ - áramrelék pedig túláram elleni védelemre szolgálnak ’kismegszakító’ túláram és rövidzár miatt - termikus túláram relék tartós túláram elleni védelem bimetál hőkioldót működtet; idővel ’elöregszik’ - többtekercses relék többváltozós logikai kapcsolat - ’emlékező, ejtő relék’ öntartású iker relé, számlálásra is képes volt, áramszünet esetén is ’emlékezett’ - polarizált relé csak megfelelő polaritásra kapcsol be - időrelé ellenálláson keresztül töltődik a kondenzátor (kis késleltetéshez), szinkron motoros késleltetés mágneskapcsolók: olyan, mint a relé, de sokkal nagyobb áramok
vezetésére alkalmas (250 – 400 V) - eltérő tekercsek esetén egyen és váltóáramra is alkalmazható - háromfázisra is - segédérintkezővel öntartóra is lehet állítani Járulékos készülékek, szervek: • hangjelzők: általában jól észrevehetők! (szirénák, kürtök, ) • fényjelzők: izzólámpa: ’üzemmód kijelzők’; törpefeszültséggel (48 V) üzemelnek érintésvédelem miatt; hideg és meleg hőmérsékleten nagyságrendi különbség az ellenállásában; jelentős fogyasztás glimm–lápa: ionizációs módon működik két fémlemez + valamilyen gáz = reakció esetén izzanak, de nagyon halványan; hosszú élettartam és minimális fogyasztás fényemittálós diódák: ’LED’ – félvezető; félvezetőn keresztül áramot vezetünk különböző színben világít, viszonylag jól láthatóan; kis fogyasztás; hosszú élettartam; sok felhasználási terület egyenirányító tulajdonsága miatt -9- Vezérléstechnika •
numerikus kijelzők: többlet információt biztosítanak 7 szegmenses kijelzők: 4*7-es pontmátrix: bonyolultabb vezérlésű, mint a 7 szegmenses 16 szegmenses alfa-numerikus kijelző: 7*5-ös pontmátrix: mixicsö: nagysebességű anódos és katódos gázkisüléses kijelző; nagy feszültséggel működött, külön tápfeszültséget igényelt; ma már nem alkalmazzák fényemittáló diódák: kis teljesítményűek; nem melegszenek; formálható pontmátrixok; nagyon elterjedt; hosszú élettartam folyadék kristályos kijelzők: LCD, nagyon energiatakarékos - szematikus - nematikus a folyadékra vetített fényt vagy átengedi (transzmissziós) vagy nem (reflexiós) két üveglemez között folyadék + polárszűrő váltakozó áramot használnak az elektrolízis elkerülése miatt nincs frissítési frekvencia CRT monitor: katódsugárcsöves • egyéb szervek: további járulékos szervek energia források és védelmi szervek: - tápegység érintésvédelem;
egyszerűbb kábelezés a szigetelés miatt - érintésvédelmi relé: ’φ-relé’ figyeli a fázisvezető és a nulla közötti áram értékét, és ha kell beavatkozik áramkülönbségre old le Számrendszerek és kódrendszerek: Valamely N szám (numerikus) az R alapú (radixú) számrendszerben deffiníciószerűen: n −1 N R = ∑ Ak * R k k =− h A legfontosabb számrendszerek és számjegyeik: Bináris (kettes) 0,1 Ternális (hármas) 0,1,2 Kvintális (ötös) 0,1,2,3,4 Oktális (nyolcas) 0,1,2,3,4,5,6,7 Decimális (tízes) 0,1,2,3,4,5,6,7,8,9 Duodecimális (12-es) 0,1,2,3,4,5,6,7,8,9,a,b Hexadecimális (16-os) 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F A digitális technikában a bináris számrendszer kiemelt jelentőségű. A bináris számrendszer egy-egy helyi értéke egy bit információt jelent. Eszerint egy 4 bites bináris szám egy 4 helyi értékű bináris számot jelent. A bináris szám legnagyobb súlyú - 10 - Vezérléstechnika bitjének helyét
MSB-vel (Most Significant Bit), a legkisebb helyi értékű bitjét LSB-vel (Least Significant Bit) jelölik: 27 20 1011001 ↑ ↑ MSB LSB Mivel a hétköznapokban leggyakrabban használt számrendszer a 10-es számrendszer, ezért a leggyakoribb feladat a decimális számrendszerbe és viszont történő konvertálás. konvertálás alatt valamely R 1 alapú számrendszerben megadott szám átszámítását értjük egy R 2 alapú számrendszerbe. Decimális-Bináris konverzió: (D B) Az adott decimális szám egész részét elosztjuk 2-vel, majd a kapott eredményt újból és újból elosztjuk 2-vel. Az eredményt a szám alá, a maradékot pedig a szám jobb oldalára húzott vonal mellé írjuk. Az osztást addig folytatjuk, amíg 0-t nem kapunk eredményül A maradékot alulról fölfelé olvasva az adott szám egész részének bináris megfelelőjét kapjuk. Az adott decimális szám tört részének bináris megfelelőjét ismételt kétszerezéssel kapjuk. A tizedesvessző
helyén húzott vonal bal oldalára 0-t írunk, ha a kétszerezéssel kapott erdmény 1-nél kisebb; és 1-et, ha nagyobb. Az utóbbi estben következő kétszerezés csak a szám tört részére vonatkozik. Az eljárást addig folytatjuk, amíg a tizedesvessző jobb oldalán csupa 0-s decimális jegyet nem kapunk. A leolvasás felülről lefelé történik Pl.: 497,3515625 10 497 1 ← 1 0, 3515625 248 0 ← 2 0 7031250 ← 1/2 124 0 ← 4 1 4062500 ← 1/4 62 0 ← 8 0 8125000 ← 1/8 31 1 ← 16 1 6250000 ← 1/16 15 1 ← 32 1 2500000 ← 1/32 7 1 ← 64 0 5000000 ← 1/64 3 1 ← 128 1 0000000 ← 1/128 1 1 ← 256 0 Tehát: 497,3515625 d 111110001,0101101 b Bináris-Decimális konverzió: (B D) A bináris-decimális konverzió legegyszerűbben a definíciós képlet alkalmazásával végezhető el. Bináris-Oktális konverzió: (B O) A bináris számjegyet a bináris vesszőtől jobbra és balra 3-as csoportokra osztjuk, s az így kapott triádok adják az oktális szám
egy-egy helyi értékét. 7 6 1 111│110│001 = 761 421 421 421 Bináris-Hexadecimális konverzió: (B H) A bináris és a hexadecimális számrendszer radixai közötti kapcsolat révén ez a konverzió a B O átalakításhoz hasonlóan végezhető el. A bináris szám számjegyeit - 11 - Vezérléstechnika a bináris vesszőtől indulva jobbra és balra négyes csoportokra (tetrádokra) osztjuk, majd ezen tetrádokat hexadecimális számokká alakítjuk. 1 F 1 1│1111│0001 = 1F1 1 8421 8421 Komplemens számok: Komplemens számon kiegészítő számot értünk. A leggyakrabban használt komplemens típusok és képzéseik: 10-es komplemens: N K10 = 10n-N 2-es komplemens: N K2 = 2n-N 9-es komplemens: N K9 = 10n-1-N 1-es komplemens: N K1 = 2n-1-N Egyes komlemens: Az aritmetikai műveletek végzése miatt fontosak a kettes számrendszerbeni komplemensek. -valamely pozitív bináris szám 1-es komplemensét a bináris helyi érték 1 0 ill. 0 1 cseréjével kapjuk
(a bináris számjegyeket tagonként invertáljuk) Kettes komplemens: Az eredeti számot a kettes számrendszerbeli ’kerek’ számra egészíti ki. Soros algoritmussal: az adott pozitív egész szám (N) legkisebb helyiértéke felöl, a legnagyobb felél haladva a nullákat és az első 1-es jegyet is változatlanul hagyjuk, de az összes többi helyiértéken invertálást végzünk. Párhuzamos algoritmussal: első lépésben előállítjuk az adott szám (N) egyes komplemensét (N K1 ), majd ehhez hozzáadunk egyet: N K2 = N K1 +1 Bináris számábrázolás digitális berendezésekben: A nagyságrend ábrázolására a fixpontos és a lebegőpontos ábrázolásmód terjedt el. Fixpontos számábrázolás: A fixpontos ábrázolás esetén a tizedesvessző a számot tartalmazó regiszterben előzetes megállapodás szerint rögzített helyen, rendszerint az első értékes jegy előtt van, vagyis minden szám csak 1-nél kisebb lehet. Lebegőpontos számábrázolás: Lebegőpontos
ábrázolásmód esetén a regiszter tartalmazza a szám normalizált értékét, mely a fixpontoshoz hasonlóan, valamilyen 1-nél kisebb szám ezt követően tartalmazza a szorzó 10 ill. 2 hatványkitevőjének előjel bitjét és a hatványkitevő értékét. Előjel ábrázolása: ’0’ az előjelbit pozitív ’1’ az előjelbit negatív Kódrendszerek: Alapfogalmak: • Kód: két szimbólumhalmaz egyértelmű egymáshoz rendelésének rendszere • Kódolás: a szimbólumok egymáshoz rendelése meghatározott szempontok szerint • Dekódolás: a kódolás ellentétes művelete – visszatérés az eredeti halmazra • Jelkészlet: azon jelek összessége, amelyeket a kódszavak felhasználásához alkalmaznak, meghatározott szabályok szerint - 12 - Vezérléstechnika • • • • • • • • Kódszó: a jelkészlet elemeiből meghatározott szabályok szerint felépített értelmes üzenet , egybefüggő jelsorozat Kódszó készlet: a kódolásra
meghatározott szabályok szerint felhasználható egybefüggő jelsorozatok összessége Tiltott kódszó: olyan kódszavak, melyek képezhetőek, de nem tartoznak az adott kódkészletbe Bit: az információ egysége Redundancia: valamely üzenetforrás ki nem használt információ mennyisége (az információnak csak egy része fontos nekünk) Relatív redundancia: Hamming-távolság: két kódszó között annyi, ahány kódelemet kell az ellenkezőjére változtatni az egyik kódszóban ahhoz, hogy a másik kódszót kapjuk Kód Hamming-távolsága: a kódszó készletének elemei között észlelt legkisebb Hamming-távolságot értjük A kódolt információ átvitele: A digitális technikában igen gyakori feladat az, hogy a berendezés egyik részéből a másik részébe, vagy egy távol lévő másik berendezésbe kell információt átvinni. Ez azt jelenti, hogy a kódolt jeleket meghatározott sebességgel egy adó-ból a vevő-be kell juttatni. Az átvitel a csatornán
történik, amely lehet villamos kábel, rádiófrekvenciás összeköttetés, fényvezető szál, pneumatikus vagy hidraulikus csőrendszer stb. Párhuzamos átvitel esetén egy-egy kódszó bitjeit egyidejűleg, külön csatornán továbbítjuk. Így az összes bit gyakorlatilag egy időben érkezik a vevőhöz Soros átvitel esetén az információ bitjeit egyenként, egymás után továbbítjuk ’egy’ vezetéken. - soros átvitel esetén fontos kérdés, hogy meddig tart az egyik bit és mikor kezdődik a másik, ezért szükség van bitszinkronizációra és karakterszinkronizációra - ha több karakter blokkba rendezve kerül továbbításra, el kell különíteni a blokkokat egymástól, ez a blokkszinkronizáció - továbbá a teljes üzenet elejének és végének ismerete az üzenetszinkronizáció által - a szinkronizáció legegyszerűbb módja külön szinkron vezeték kiépítése az adó és a vevő között (párhuzamos átvitelnél ez szokásos is, sorosnál csak
akkor, ha az adó és vevő közel van) Az időzítés szempontjából a soros átvitel lehet asszinkron és szinkron. - az asszinkron átvitelt START-STOP üzeműnek is nevezik, mert az ’adás’ mindig egy start jellel kezdődik és egy stop jellel fejeződik be - a bitszinkronizáció a start jellel indított, az adó bitfrekvenciájával azonos frekvenciájú ÓRA jellel valósítható meg a vevőben - az aszinkron átvitel nagy előnye, hogy a berendezések bizonyos mértékig egyszerűbbek és olcsóbbak, mivel az információt nem kell tárolni, de hátránya, hogy az átvivő csatorna nincs kellően kihasználva a hosszú szünetek miatt - a szinkron átvitel a lehető legjobb csatorna kihasználást teszi lehetővé, mivel ennél általában nem tartanak szünetet, a karakter sorozat blokkba van rendezve - a blokk szinkronizálást a blokk elején elhelyezett a szinkronkarakterekkel biztosítják, egyes rendszereknél az egyes blokkok között szünetet tartanak, az
aszinkron átvitelhez hasonlóan - a szinkron átvitelű berendezések általában drágábbak a járulékos buffer tárolók miatt - 13 - Vezérléstechnika Moduláció: Távolsági adatátvitelnél a csatornára kerülő digitális jelet át kell alakítani, modulálni kell. Mivel a csatorna mindkét végén lévő készülék lehet egyszerre adó és vevő is, ezért mindkét oldalon szükséges egy modulátor és demodulátor. Amplitúdó moduláció: (AM) a 0 ill. 1 értéket a nagyfrekvenciás vivő két különböző amplitúdó értéke reprezentálja; a modulált jelet burkológörbével látják el, amit szűrővel és egyenirányítással le lehet venni; igen zavarérzékeny Frekvencia moduláció: (FM ill. FSK-Frequency Shift Key) a két bit értéket a vivőhullám kétféle frekvencia értéke reprezentálja Fázismoduláció: a két bit értéket a vivőhullám kétféle fázishelyzete jelenti • RZ (Return to Zero): jellegzetessége, hogy minden bit után
visszatér 0-ra • NRZ (Non Return to Zero): a teljes bit ideig a jle bit értéke változatlan, tehát több egymás utáni 1-es nem különül el • Fáziskódolt jelátmenet (PE - Phase-encoded): az ugrás reprezentálja a biteket attól függően, hogy az átmenet milyen irányú 0 1 vagy 1 0. Mivel az információt itt is jelátmenetek reprezentálják, ezért ezt is a mágneses adatrögzítésnél használják Csomag továbbítás: ’címző’ (feladó); ’címzett’; ’irányítók’ szükségesek egyszerű rendszernél címzett, összetett rendszernél címző és címzett is fontos Csomagok tartalmazzák: cím; adatméret; adatszám; magát az adatot; ellenőrző karaktereket Számkódok, numerikus kódok: • Súlyozott (pozícionális) kódok: A pozícionális kód a kódszavak helyi értékéhez valamilyen valós számot (súly) rendel. Ilyenkor a kódszó információtartalmát rendszerint a kódszó egyeseinek megfelelő súlyok összege adja. k N ω = ∑Wi
S i i =1 • W i – súlyozás Si – 0 , 1 k – kódszó elemeinek száma BCD kódok: A száminformációk továbbítására leggyakrabban a binárisan kódolt decimális kódokat (BCD) használják. Tíz számjegy kettes számrendszerbeni ábrázolásához minimálisan 4 helyi értékre van szükség. Viszont a 4 változó lehetséges 16 kombinációjából csak 10-et használunk ki. - a decimális számok feldolgozásánál leginkább a normál BCD kódot (NBCD) alkalmazzák súlyozása: 8 4 2 1 - AIKEN feltöltése: mindig a kisebb helyi értékűeket tölti fel először, majd a kettesek közül mindig az elsőt súlyozása: 2 4 2 1 - STIBITZ (háromtöbbletes vagy élőnullás kód), minden értékhez 3-at kell adni WHITE itt is a kisebb helyi értékűt tölti fel először; súlyozása: 5 2 1 1 - 14 - Vezérléstechnika • Excess kódok: Az excess kódok közvetetten súlyozott kódok. A szám képzése: k Nω = • ∑W S − e i =1 i i q e; q : két
különböző szám, a kódolástól függően kell megadni STIBITZ, ha e = 3 ; q = 1 NIDDING, ha e = 5 ; q = 2 DIAMOND, ha e = 6 ; q = 27 Hibafelfedő és javító kódok: Az előzőekben ’zajmentes’ csatornákat feltételeztünk, de ’zajos’ csatorna esetén a küldött kódszó megváltozhat, azaz a kódszóban 0 1 vagy 1 0 csere jöhet létre. A gyakorlatban annak a legnagyobb a valószínűsége, hogy csak egy helyen változik meg a kódszó. - Egyetlen hiba ún. paritásos ellenőrzéssel felfedhető: azaz minden kódszóval még egy ellenőrző helyi értéket (paritás bit) is átviszünk a csatornán. Ennek értékét úgy választjuk meg, hogy a teljes kódszó az ellenőrző helyi értékkel együtt páros vagy páratlan 0-kat ill. 1-eseket tartalmazzon Ezt a járulékos helyi értéket paritás bitnek nevezik. A TTL rendszerben a paritás bit előállítása, ill. ellenőrzése az SN 74180 típusú bővíthető 8 bites áramkörrel könnyen elvégezhető. A
paritásos ellenőrzést igen gyakran alkalmazzák, mert így tetszőleges kódtípus felruházható hibafelfedő képességgel. A paritás generátor figyeli az adó kimeneteit és előállítja a paritás bitet, amivel kiegészíti az átviendő jelet. A vevő oldalon a paritás vizsgáló figyeli a kiegészített információt és ha nem megfelelő számú 1-est észlel, akkor jelzést ad. - Egyszerűbb hibafelfedő áramkört igényelnek az aránykódok. Ezek alapvető jellemzője, hogy az egyes kódszavakban szereplő 1-esek és 0-k aránya állandó. A leggyakrabban használt aránykód a 7-4-2-1-0 súlyozású. - WALKING-kód - 7-4-2-1-0-kód - 8-4-2-1-0-kód - LORENZ-kód - 10-ből 1 –kód - 7-ből 1 –kód - HAMMING-kód A hibafelfedés feltétele, hogy a Hamming-távolság (D) egynél nagyobb legyen. Ha ugyanis a két küldött kódszó között a H.-távolság 1, akkor egy hiba a másik kódszó t is eredményezheti. Maximálisan D-1 hiba fedhető fel Az eddigiekben csak
a hiba létének kimutatásával foglalkoztunk. A hiba javításához a hiba helyét is ismerni kell. - A hibajavítást blokkszerű adatátvitel estén sor- és oszlop paritás ellenőrzésével is elvégezhetjük. Ha az adó kódszavait szisztematikusan egymás alá írva képzeljük el, akkor egy-egy paritás bitet minden sorhoz és minden oszlophoz rendelhetünk. Ily módon egyetlen hiba a hibás sor és oszlop metszéspontjában van. Így tudjuk a hiba helyét, tehát értékcserével (0 1 vagy 1 0) a hiba javítható. - 15 - Vezérléstechnika Alfanumerikus kódok: • Telex kód: 5 bites alfanumerikus kód, mivel az 5 sáv csak 25 = 32 variációs lehetőséget nyújt, ezért külön kell gondoskodni a betűk és a többi jel kódolásáról • ASC kód: 7 bitesnek indult, de 8 bites lett, így minden karakter belekerült a karaktereket rekordokban kódolják; minden rekord egy :-tal kezdődik CRC – ciklus ellenőrző összeg (kódkulcs: 8 bites szám) 1: ex-or
művelet 0: nincs művelet a kódpolinómot lehet variálni bonyolult előállítás viszonylag megbízható nem tudja a hibát javítani az ellenőrző számításnál mindig 0-át kell kapni Soros adatátviteli rendszerek: A soros adatátvitelhez csak kevés összekötő vezeték kell. Nagy távolságú összeköttetéseknél ez az előny különösen fontos. A párhuzamos átvitel költségessége és a soros gyors fejlődése miatt a soros átvitelnek egyre nagyobb a létjogosultsága. A soros adatátvitel fő problémája az adó és vevő szinkronizálása. Többféle szabványosított adatátviteli rendszer van: • 1 – Wire: RTM aszinkron - DS-1420 minden darab különálló kódot (hivatkozási kód) tartalmaz - erős protokollos rendszer szerint működnek - 16 - Vezérléstechnika • • • • - a kommunikációban a μs-nyi szünetek jelentik a 0 ; 1 –eket - ha egyszerre több eszköz van a buszon, akkor egy ’search-rom’ paranccsal azonosítja azokat:
1. az utasítás után minden eszköz kirakja az azonosító jel első bitjét a buszra 2. az összes egység kirakja a 0 bitjének az inverzét a buszra 3. a master egység eldönti az érvényest a két bit alapján, majd ezt elküldi, ezzel kijelöli azokat, amelyekkel foglalkozni fog SPI – busz: szinkron - a master órajellel vezérel - nincsen adatvédelem - csak adat olvasásra alkalmas - ’data in’ és ’data out’ vezetékek kellenek olvasásra és parancs adásra két párhuzamos vezeték, ami gyorsabbá, de jelentősen bonyolultabbá teszi - ~2 – 2,5 Mbit/sec 2 IIC ; I C – busz: szinkron - folyamatirányító vagy adatgyűjtő rendszerekre jól alkalmazható - adatvezeték két irányra: ’serial clock’ ; ’serial data’ - master – slave kapcsolat van az eszközök között - mindig a master generálja az órajelet (magas szint), de a master jelleget más is átveheti - nincsen ellenőrzés, csak adatforgalom - zavarszűréssel rendelkezik - két vezeték
szükséges kis távolságra alkalmazható - start – stop parancsok - eszköz maximális kapacitása: 400 pF - ~400 kbit/sec RS 232 – busz: aszinkron; (full simplex) - iparban is használják 10 – 15 m-re, de egyes változatait akár 45 m-re is - hosszú vezeték estén zavarérzékeny - általában csak két eszköz összeköttetésére használják - meghatározott sebességgel kommunikál, amit szabályoznak és irányítanak - az átvitel során: start –stop; adatbit (8 bit); paritás bit átvitele történik, amiket még programozni is lehet - 2 interfészes adatátvitel: TXD (Transmit Data), RXD (Receive Data) és más (RTS, CTS, DSR, DTR, DCD) vezérlőjeleket használnak - jelszint: ± 24 V ; a tiltott sáv: ± 3 V - igen elterjedtek A nagyobb távolságú adatátvitelhez feltétlenül szükséges a potenciálválasztás, hogy a zavarjelek hatását elnyomjuk. Ilyen tulajdonságú az áraminterfész rendszer, mely áramhurok vagy current-loop néven is ismert. - a
két készülék csatolásánál az adó- és a vevőoldalon zárjuk a hurkot - a hurokba 20 mA áramot táplálunk be, amire egyszerűen egy +12 V-ra kötött ellenállást használunk - a logikai 1 megfelel az áramnak, a logikai 0 pedig az árammentes esetnek - a vezeték hossza maximálisan 1000 m lehet - 300 kbit/sec – 2Mbit/sec –ig változhat az adatátviteli sebesség elektromos kialakítás szerint RS 485 – busz: - potenciál különbségen alapuló kommunikáció - 17 - Vezérléstechnika • • - kétvezetékes busz, de csak egyirányú kommunikáció van - sodort érpárral kell működtetni, mivel így a zavaró jelek szimmetrikusan változtatják meg a jelet nem igazán zavarérzékeny - a csatlakoztatható eszközök száma nincs korlátozva - viszonylag nagy távolságú adatátvitelre alkalmas, akár 1200 m - ismétlő áramkörökkel az áthidalandó távolságot még lehet növelni RS 422 – busz: (full duplex: 2-2 vezeték az egyiken adatot kap a
másikon vezérel) - fizikai felülete ugyanolyan, mint az RS 485-ösé - galvanikus leválasztásra alkalmas ( 100-tól néhány száz Ohm-ig szokták lezárni a vezeték két végét) - viszonylag nagy távolságú adatátvitelre alkalmas - az adatátviteli sebesség növekedésével csökken az áthidalható távolság és az átvitel pontossága - 250 kbit/sec – 2,5 Mbit/sec CAN – busz: Car Area Network Controller Area Network - nagysebességű átvitelre képes: 1 Mbit/sec – maximálisan 40 m-re - az autókban három különböző sebességű buszrendszer van: 1. biztonsági rendszert összekötő leggyorsabb 2. autó vezérlő egységeit összekötő közepes 3. kényelmi rendszert összekötő alacsony - BASIC – can: 11 bites rendszer PELI – can: 29 bites rendszer - buszarmitáció van a buszon - szignifikáns bitek vannak: domináns: 0 ; receszív: 1 - azonosító kódokat is küldözgetnek, amikkel prioritást is meg lehet állapítani - a csomag hosszúsága
kötött: 8 byte maximálisan - csak az üzeneteket azonosítják, a vevő oldalon megvan, hogy melyik milyen kódú adatot dolgozhat fel Master – Slave viszony a buszon: - master irányít - egyszerre csak egy master lehet, slave-ekből több is - a master osztja ki, hogy mikor melyik aktív - mindenkinek van ’master’ joga, meghatározott szabályok szerint - a jelenlegi master lemondhat jogáról, ilyenkor más veszi át a szerepét, ez így megy mehet tovább, de az átvevést vissza kell igazolni, csak akkor adható át ténylegesen a jog - a master a jog átadását általában több irányba is megvalósíthatja, hogy biztosan legyen olyan eszköz, amelyik biztosan át tudja majd venni - a slave-ekben van egy időzítő, ami számlálja, hogy neki mikor kell majd sorra kerülnie - 18 - Vezérléstechnika - a master kimaradása esetén a slave-ek figyelik a hálózatot, hogy van-e adatforgalom és figyelik az időzítőjüket, majd próbálkoznak master-ré előlépni
csökken a rendszer eszközigénye az esetleges hibák esetén nő a megbízhatóság Processzoros rendszerek: A 8 bites processzorokról általában: Processzorok belső felépítése: • ALU (Arithmetic Logic Unit): legfontosabb rész; az utasításokban meghatározott aritmetikai és logikai műveleteket hajtja végre - Akkumulátor: egy speciális funkciójú 8 bites regiszter, amely forrás és eredményregiszterként egyaránt tekinthető. Az aritmetikai és logikai műveletek egyik operandusa szinte mindig az akkumulátorban van és az eredmény ugyancsak itt képződik - Utasításszámláló regiszter (Program Counter – PC): amely mindig a soron következő utasítás memóriabeli címét tartalmazza, direktben nem írható át a tartalma - Veremmutató (Stack Pointer – SP): egy speciális regiszter, amely a veremtár legfelső elemének címét tartalmazza. A veremtároló az adatmemória (RAM) egy lefoglalt területe. Adatokat csak a verem tetejére lehet tenni és
csak onnét lehet levenni „utoljára be, elsőre ki” (Last-In-First-Out = LIFO) memória kezelés. A stack pointer mindig arra a helyre mutat, ahová a következő adatot elhelyezi. - Állapotregiszterek (Flag regiszter): ún. jelzőbitek ill más vezérlő, ellenőrző biteket tartalmaznak: Z flag (zérus); S flag (sign = előjel); P flag (parity = paritás); C flag (carry = átvitel); AC flag (auxiliary carry = segéd átvitel) - Általános célú regiszterek: - 19 - Vezérléstechnika • • • • • Utasítás végrehajtása a processzoron belül: A működése ciklikus: utasítás lehívás; végrehajtás; lehívás; végrehajtás . Ezt a pontos sorrendiséget a rendszeróra vezérli. A legelemibb időegység a gépi állapot, amely rendszerint egy órajel periódusa alatt játszódik le. Általában több gépi állapot alkot egy gépi ciklust. A gépi ciklus egy összetettebb műveletet jelent. Egy utasítás lehívásának és végrehajtásának együttes
műveletét utasítás ciklusnak mondjuk. Az utasítás végrehajtás folyamata: utasítás előkészítés, lehívás (fetching) a programszámláló tartalmának növelése a műveleti kód (operation code) értelmezése a művelethez szükséges adatok előkészítése utasítás végrehajtása (executing) az eredmény elhelyezése az előírt helyre az utasítás-feldolgozási ciklus újra kezdése Utasítások hossza a processzoron belül: A számítógép utasításainak hossza lehet rögzített fix érték, ill. változó hosszúságú. Az utasítás szerkezete határozza meg, hogy a processzornak az utasítás mely részét hogyan kell értelmeznie. Értelmezés szempontjából az utasítások 3 fő részre oszthatók: műveleti kód; címrész; módosító rész. Címzési módok: processzortól függően sok fajtája van: - Közvetlen, direkt címzés: az utasításban maga a tárolóhely cím szerepel - Abszolút címzés: a tényleges címet tartalmazza az utasítás;
nem kell sokat számolni - Relatív címzés: valamilyen alapcímhez viszonyított címet tartalmaz az utasítás; rövid, de egy kicsit kell számolni - Bennfoglalt címzés: olyan címzés, amely nem tartalmaz címet, mivel azt a műveletet csak pontosan egy eszköz hajthatja végre - Közvetett, indirekt címzés: az operandus az utasításban megcímzett tárolóhelyen megadott memória címen van - Indexelt és indirekt címzés: indirekt módon adom meg a címet, de még valamilyen kiegészítéssel megtoldom Szubrutin, szubrutin hívás, makrók: - Szubrutin: alprogram az ismételten előforduló feladat részek programozásának hatékony eszköze, egy olyan önálló funkciójú utasítás sorozat, amely egyszer szerepel a programban (rendszerint a program végén helyezik el), de a feladat elvégzésekor többször lehet használni. A szubrutinok egymásba ágyazhatók Alkalmazni általában egy vezérlő-átadó programmal lehet, amelynek ’return’ a vége, amivel
visszatér főprogramhoz (’call’ meghívás esetén a hívással mindjárt a program futási állapotának eggyel későbbi (n+1) állapotát tárolja a stack-ben, majd a szubrutin lefutása után a ’return’ a stack-ből egyből az n+1edik állapotot olvassa ki) - Makró: a hívás helyén kerülnek a program memóriába és annyiszor, ahányszor hívás történik, ennél fogva a makrók használata akkor célszerű, ha kevés számú utasításból állnak. A makrók tartalmazhatnak szubrutinokat is Megszakítás: A megszakítási események kapcsán különbséget kell tenni a többnyire külső eredetű megszakítások és az utasítások szabályszerű végrehajtását megállító kivételek között. - 20 - Vezérléstechnika • A szoftver megszakítási kérelmek azok, amelyek programból lettek kezdeményezve, nem maszkolhatók. A hardver megszakítási kérelmek többsége maszkolható, de van nem maszkolható is. A megszakítások kiszolgálásakor több
olyan kérdés van, amit a rendszernek meg kell oldania: - a megszakítási kérelem helyének megállapítása (melyik eszköz kezdeményezte a megszakítást) - a megszakítások prioritásának meghatározása, azaz a megszakítási sorrend felállítása, több, egy időben jelentkező kérelem esetén - egyes eszközök ideiglenes kizárása a megszakítási procedúrából - többszörös megszakítás kiszolgálás megoldása A megszakítási kérelem keletkezési helyének megállapítására egy megszakítási vonal esetén két módszer alkalmazható: - szoftver módszer esetén a lekérdezéses megszakításkezelés - hardver módszer esetén a megszakítás vezérlő alkalmazása Több megszakítási vonal esetén, amikor minden eszköz saját megszakítást kérő vezetékkel rendelkezik a legáltalánosabban használt a vektor módszer. DMA (Direct Memory Acces): Közvetlen memória hozzáférés: Egy regisztert felprogramozunk, hogy mit; honnan és hova vigyen el. A
processzortól engedélyt kér a feladat végrehajtására, meghatározott módon prioritás szerint megkapja. Ettől kezdve ő irányítja a szükséges rendszerfolyamatokat, amiket nagy sebességek képes végezni. Eközben a processzor más folyamatokat tud felügyelni, ami jelentős időmegtakarítást tesz lehetővé. A folyamat befejeztével visszaadja az irányítást a processzornak Memória: A félvezető alapú memóriák a mai digitális berendezések nélkülözhetetlenelemei. Funkció szerint két nagy csoportba sorolhatók: • RAM memóriák (Random Access Memories) • ROM memóriák (Read Only Memoties) RAM memóriák: A közvetlen, tetszőleges hozzáférésű, változtatható tartalmú, írható, olvasható (R/W) memóriák. A RAM memóriák készülhetnek bipoláris, ill MOS technológiával Bipoláris technikával csak Statikus (SRAM), MOS technikával statikus ill. Dinamikus (DRAM) egyaránt készíthető. - az SRAM-ban az információt egy címzési, írási,
olvasási logikával kiegészített eszköz (RSFF) tárolja - a DRAM esetében a vezérlő elektróda és az alapréteg közötti kapacitás tárolja az információt töltés formájában - a CMOS SRAM-okat ellátják egy tartalék üzemmóddal (standby), ilyenkor igen alacsony a teljesítményfelvétel, az információt megtartja, de írás, olvasás nem lehetséges - kikapcsolás esetén az adatok elvesznek ROM memóriák: Ebbe a csoportba csak kiolvasásra szánt memóriák tartoznak - maszkprogramozott ROM gyárilag programozott ROM - PROM elektromosan programozható és nem törölhető - EPROM elektromosan programozható és UV fénnyel törölhető - 21 - Vezérléstechnika - EEPROM elektromosan programozható és törölhető, de a törlés rendszerint bájtonként történik Flash EPROM E2PROM, amely nem törölhető bájtonként, hanem chipenként EAROM elektromosa programozható és törölhető, működése az E2PROM-hoz hasonló Memóriák lábkiosztásai:
lábkiosztás szempontjából kompatibilisek! - adatbusz: 8 bit 8 adatvonal 16 bit 16 adatvonal - címbusz: minél nagyobb a memória, annál szélesebb lehet a címbusz - vezérlőbusz: van olyan, amit csak olvasnak OE: output enable + CE: chip eable (engedélyező) író és olvasó memóriák esetén külön-külön kell láb a kettőnek RD: read ; WR: write Memóriák bővítése: A memóriák bővítésére akkor van szükség, ha az egy tokban lévő tárkapacitás nem elegendő az adott feladat megoldásához: • címhossz szerinti bővíthetőség: a CE bemenetek tiltásával és a három állapotú kimenetek összekötésével érhető el • adathossz szerinti bővíthetőség: a címvezetékeket párhuzamosan kötjük - 22 - Vezérléstechnika Mikrokontrollerek: Processzor mag és ROM + RAM típusú memória; megszakítás vezérlők (külső megszakítást is képes kezelni); timer-ek; időzítők; egységszámlálók; I/O periféria; A/D – D/A átalakítók
’watch-dog’ áramkörök: ’újraindítható monostabil multivibrátor’ Lábkiosztás: EA: szoftveresen felül lehet bírálni PSEN: külső memóriából való olvasáskor aktív Multiplexer címbuszt raknak a processzorhoz mindig a címbusz állapota megy ki először - 23 - Vezérléstechnika Processzor belső lábkiosztása: Számláló, időzítő egység: (részletesen: 1992. Rádiótechnika évkönyvben) - 24 - Vezérléstechnika Timer1 – soros port regisztere vagy órajel generátora Tr - betöltés M0 , M1 – 4 féle üzemmód: 0 – 0 örökölt üzemmód; 8 bites számláló, regiszter 1. 16 bites regiszter ( L ; H ) 2. 8 bites időzítő, számláló (TL); TH automatikusan újratölt 1 – 1 TL-0 8 bites időzítő (Timer 0); TH-0 8 bites regiszter (Timer 1) Soros port: alapesetben 1db a kontrollerben LX –TX-es vonal (elvileg egyidejűleg advesz) adatátviteli sebesség timer-rel programozható fel 4 db üzemmód a Sereal Control-ban (vezérlő
egység): m. 0: szinkron adatátviteli kód 8 bit (adat) közlekedik adó – vevő-nél megszakító byte m. 1: 10 bitet visz át (Baud-rate változtatható) TX – adás ; RX – vétel strat – stop bitek m. 2: 12 bitet visz át +paritás bit (páros) programozható m. 3: megegyezik m 2-vel Timer1, Timer2 adja a BAUD-rate-et az órajel fix és változtatható is lehet Megszakítás rendszer: - két külső megszakító (van olyan, ahol 6 db külső van) int.0 , int1 szintre vagy élre legyen aktív - két Timer + külön-külön megszakító - 2db Receive Trasmitter mindegyiket külön-külön le lehet tiltani és van ’globális’ megszakító bit, amely a többit nem állítja el, csak megkönnyíti a műveletet Prioritás: - alacsony megszakítási szinten: csökkenő sorrendben: int.0; t0; int1; t1; soros; t2 (ha van) - magas megszakítási szinten: itt nincs sorrend, hanem amelyik ide kerül, az mind fontosabb a többinél; itt mindegyik egyenlő, csak időrendi sorrend
van - 25 - Vezérléstechnika Fogyasztás: - a frekvenciától erősen függ ’power down’ ; ’idle’ üzemmód takarékos üzemmód külső megszakítással lehet takarékos üzemmódból visszahozni takarékos üzemmódban megmaradnak a kimeneti portok állapotai (nincs adatvesztés!) - 26 -
 II. Géza 1130-ban született Tolnán. Apja II. Béla, anyja pedig Ilona, I. Uros szerb nagyzsupán lányának első gyermeke volt. [2]1141. február 13-án meghalt apja, II. Béla király. Béla és a hozzá hű főurak ekkorra már minden velük szemben álló főurat eltávolítottak, aki bármely trónkövetelőt támogathatott volna, ezért nem volt akadálya, hogy legidősebb fiút, Gézát
II. Géza 1130-ban született Tolnán. Apja II. Béla, anyja pedig Ilona, I. Uros szerb nagyzsupán lányának első gyermeke volt. [2]1141. február 13-án meghalt apja, II. Béla király. Béla és a hozzá hű főurak ekkorra már minden velük szemben álló főurat eltávolítottak, aki bármely trónkövetelőt támogathatott volna, ezért nem volt akadálya, hogy legidősebb fiút, Gézát