A doksi online olvasásához kérlek jelentkezz be!
A doksi online olvasásához kérlek jelentkezz be!
Nincs még értékelés. Legyél Te az első!
Legnépszerűbb doksik ebben a kategóriában





Tartalmi kivonat
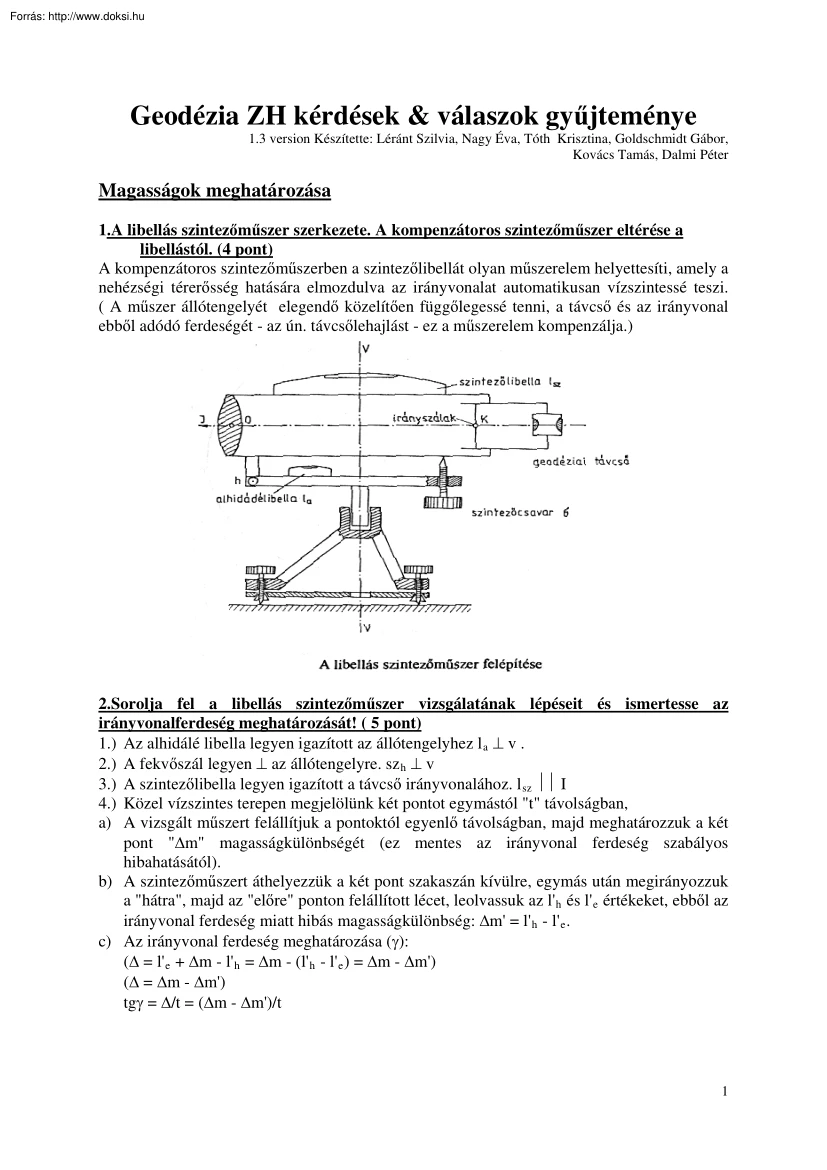
Geodézia ZH kérdések & válaszok gyűjteménye 1.3 version Készítette: Léránt Szilvia, Nagy Éva, Tóth Krisztina, Goldschmidt Gábor, Kovács Tamás, Dalmi Péter Magasságok meghatározása 1.A libellás szintezőműszer szerkezete A kompenzátoros szintezőműszer eltérése a libellástól. (4 pont) A kompenzátoros szintezőműszerben a szintezőlibellát olyan műszerelem helyettesíti, amely a nehézségi térerősség hatására elmozdulva az irányvonalat automatikusan vízszintessé teszi. ( A műszer állótengelyét elegendő közelítően függőlegessé tenni, a távcső és az irányvonal ebből adódó ferdeségét - az ún. távcsőlehajlást - ez a műszerelem kompenzálja) 2.Sorolja fel a libellás szintezőműszer vizsgálatának lépéseit és ismertesse az irányvonalferdeség meghatározását! ( 5 pont) 1.) Az alhidálé libella legyen igazított az állótengelyhez l a v 2.) A fekvőszál legyen az állótengelyre sz h v 3.) A
szintezőlibella legyen igazított a távcső irányvonalához l sz I 4.) Közel vízszintes terepen megjelölünk két pontot egymástól "t" távolságban, a) A vizsgált műszert felállítjuk a pontoktól egyenlő távolságban, majd meghatározzuk a két pont "m" magasságkülönbségét (ez mentes az irányvonal ferdeség szabályos hibahatásától). b) A szintezőműszert áthelyezzük a két pont szakaszán kívülre, egymás után megirányozzuk a "hátra", majd az "előre" ponton felállított lécet, leolvassuk az l' h és l' e értékeket, ebből az irányvonal ferdeség miatt hibás magasságkülönbség: m' = l' h - l' e . c) Az irányvonal ferdeség meghatározása (): ( = l' e + m - l' h = m - (l' h - l' e ) = m - m') ( = m - m') tg = /t = (m - m')/t 1 3.Miből származik és hogyan nyilvánul meg a
horizontferdeség? (2 pont) Abból származik, hogy hibás a műszerben a kompenzálás, és nem teljesül a kompenzátor működési egyenlete és az állótengely sem függőleges. A kompenzált irányvonalak ilyenkor a kompenzálási ponton átmenő ferde horizont síkot alkotnak, ez a horizont ferdeség. 4.Sorolja fel a szintezés szabályos hibaforrásait és hatásuk kiküszöbölésének módját!(5) 1.) A szintfelület görbültségének hatása - egy-egy műszerállásban a műszerrel a lécpontoktól egyenlő távolságban kell felállni! Műszerhibák: 2.) Irányvonal- ferdeség - a szintezőlibella buborékját minden leolvasás előtt gondosan középre kell állítani és középen maradását leolvasás után ellenőrizni kell; a műszert és különösen a szintezőlibellát védeni kell az egyoldalú hőhatástól. 3.) Horizontferdeség - a magasságkülönbséget minden műszerállásban kétszer mérjük meg és a második mérés előtt az állótengely dőlését a
függőlegeshez képest ellentettjére változtatjuk. 4.) Az állótengely nem függőleges + hibás a kompenzátor Léchibák: 5.) A fekvőtengely külpontossága - az állótengely gondos függőlegessé tételével csökkenthető. 6.) Talppont hiba - a szintezési vonalban a műszerállások száma legyen páros 7.) A lécosztás hibái - a szintezőlécet időnként komparálni kell! 8.) Lécferdeség - a szintezőléc függőlegességét igazított szelencés libella használatával, a léc mozdulatlanságát kitámasztó rudakkal kell biztosítani. Külső körülmények okozta hibák: 9.) Műszersüllyedés - a szintezést ellentétes irányban haladva megismételjük 10.) Lécsüllyedés - a lécet szabatos szintezésnél a talajba vert gömbölyűfejű vascövekre, egyébként facövekre vert gömbölyűfejű szegre vagy szintezősarura kell helyezni, a szintezést egyenletes sebességgel, oda-vissza értelemben kell végrehajtani. 11.) Szintezési refrakció - szintezni csak
arra alkalmas (léglengéstől és légrezgéstől mentes) időben szabad, az irányvonal nem haladhat a talajhoz túlságosan közel (30-50 cm min. lécleolvasás) és a műszer - léc távolság nem lehet túl nagy (70-40 m max) 5.A szintezés apriori km-es középhibája (képlet) (3 pont) mkm 1000 d L= 1 km - re d a műszer-léc távolság [m] az irányvonal középingadozása [radián] (Az eredmény méterben adódik.) 6.Mi a trigonometriai magasságmérés előnye és hátránya a szintezéssel szemben? (2 pont) Előnyei: - rövid távon nagy magasságkülönbség meghatározására is alkalmas - gyors, mert nagy távolságokban levő pontok magasságkülönbsége is meghatározható egy műszerállásban - megközelíthetetlen pontok magasságának meghatározására is alkalmas Hátrányai: - a meghatározott pont kevésbé pontos - ismerni kell a két pont közötti távolságot 2 7.Milyen előnnyel jár a trigonometriai szintezés? (1 pont) Olyankor is
alkalmazható, ha a két pont nem látszik össze, vagy a teodolitot egyik ponton sem tudjuk felállítani. 8.Mekkora a földgörbület és a refrakció hatása külön-külön a trigonometriai magasságmérés eredményére x km távolságon? (3 pont) - a földgörbület hatása: d 2 x2 2 R 2 R - 0,4 km x 5 km ahol R a közepes földsugár (6380km) a refrakció hatása: d 2 d 2k x 2k 2 2R 2R ahol k a refrakciós együttható érték (k = +0,13-nak szokás venni) 9.Mivel arányos a m magasságkülönbség m középhibája és p súlya, ha m értékét szintezéssel / trig. Magasságméréssel határoztuk meg? Hogyan osztja el a szintezett / trig. Magasságméréssel mért magassági vonal záróhibáját? (5 pont) Szintezés: mm * L d - a műszer-léc távolsággal - az irányvonal középingadozásával Trigonometriai magasságmérés: mm
2,5 * d - a vízszintes távolsággal - a magassági szög középhibájával - a refrakciós együtthatóval A záróhibát a távolságok arányában osztjuk el. Térbeli helymeghatározás navigációs műholdrendszerrel 10.Mit jelent a hozzáférés korlátozása(S/A) és az A-S? (3 ) S/A: Mivel a C/A kód túl pontos( ezért veszélyes ) navigációt tett lehetővé, a pontosságot mesterségesen rontották le. - 1. A frekvencia- etalonnak jelét látszólag véletlenszerűen változtatták, így akik nem ismerték a szabályszerűséget azoknak bizonytalanná tette a helymeghatározást. - 2. A pálya- és órakorrekciók sugárzását letiltották, ennek eredményeképpen a mérés idején a műhold helyzete csak közelítő pontossággal ismert, tehát a földi vevő helyzetét sem lehet pontosan tudni. A-S: Ezen intézkedés lényege, hogy a P kódot egy ún. Y kóddá konvertálják, így ezt a kódot csak azok használhatják akiknek birtokában van az átszámolás
algoritmusa, ezzel elérhető hogy ne élhessen vissza akárki a GPS-szel. 3 11.Az időméréses és fázisméréses távolságmeghatározás alapképlete vagy közvetítő egyenlete. (4) Az időméréses távolságmeghatározás képlete: US=U(GPS)+S U T =U(GPS)+ T S Ahol: U a jel kibocsátásának pillanata a műhold órája szerint. U T A jel vételének pillanata a vevő órája szerint S, T a két óra eltérése egy közös GPS időtől. A két óra eltérése miatti ál távolság R=v(U T - US)=+v*r Ahol v az elektromágneses sugárzás ismertnek tekintett terjedési sebessége. a valódi távolság r= T - S az ún. kölcsönös óraállás A helymeghatározás =(S- T ) általános képletében T három ismeretlen összetevője mellett a kölcsönös óraállás a negyedik ismeretlen. Bár ez az ismeretlen bizonyos esetekben kiküszöbölhető, a helymeghatározáshoz négy pszeudo-távolságot kell egyidejűleg
megmérni. Fázisméréses távolságmeghatározás: f=v/ ahol f a periodikus jel frekvenciája v a sebessége pedig a hullámhossza. f=/t ahol a pillanatnyi rezgésállapot =fdt=f*t ,ha t 0 =0 (kezdő fázis értéke 0 ) Ugyanabban a pillanatban a jelforrástól távolságban a fázishelyzet f*t ahol t a távolság megtételéhez szükséges idő: t =v A leírtak alapján a t időpontban kibocsátott és ugyanebben az időpillanatban a jelforrástól távolságban vett jel kölcsönös fázishelyzete: t - =(t- t )=f(t-v) 12.Az időmérés és a fázismérés távolságmeghatározással elérhető pontosság(2) Időméréses C/A kódban 3 m, P kódban 0,3 m. Fázismérésnél 2 mm. 13.Mit jelent az abszolút és a relatív helymeghatározás?(2) Koordinátákat szolgáltató helymeghatározása abszolút. Koordináta különbségeket szolgáltató helymeghatározás relatív. 14.Mit jelent
a statikus és kinematikus helymeghatározás?(2) Ha az észlelés ideje alatt a vevő mozdulatlan, akkor statikus, ha a vevő mozog akkor kinematikus helymeghatározásról beszélünk. 15.Mit jelent a valós idejű és az utólagos feldolgozás?(2) A szigorú értelemben vett valós idejű feldolgozás az egyes elemi mérések eredményeiből általában azonnal szolgáltat helymeghatározó adatokat, de valós idejűnek tekintjük az adatfeldolgozást akkor is, ha az eredmények még az észlelés helyén megszületnek. Utófeldolgozással a mérés helyszínén általában több helyen rögzített adatokat együttesen dolgozzák fel irodában az észlelési programot követően. 16.Mit jelent a DOP és mit jellemzünk vele?(2) A DOP a műholdak geometriai elhelyezkedéséből adódó, középhibát szorzó tényező, mindig 1-nél nagyobb szám. A térbeli helymeghatározás pontosságát lehet vele jellemezni 4 17.Milyen durva hiba hatások terhelik a műholdas
helymeghatározás eredményét és hogyan küszöbölhető ki ezek a hibahatások?(2) Durva hibát okoz a többutas terjedés, ami a direkt terjedési és a visszaverődött jelek interferenciája. A többbutas terjedés veszélye elkerülhető az álláspont körültekintő megválasztásával. Fázisméréses távolságmeghatározás esetén durva hibát okoz az ún ciklusugrás., ha a ciklusszámlálás ideje alatt a műhold tereptárgyak takarásába kerül A ciklusugrás is az álláspont körültekintő megválasztásával kerülhető el, de utólagos adatfeldolgozás estén megfelelő szoftver alkalmazásával a vételből kimarad ciklusszám általában meghatározható. 18.Mit jelent a differenciális/kinematikus helymeghatározás valós időben(5) A helymeghatározás differenciális módszere esetében a sugárzott adatok általában az egyes műholdakra vonatkozó távolságkülönbségek, ritkábban koordinátakülönbségek. A kinematikus módszer estében a mozdulatlan
vevő átjátszó adóként működve saját észlelési adatait sugározza a mozgó vevők felé. Számítások vetületi síkon 19. Mi az irányszög, mi az irányszögátvitel és mi az ellentett irány?(3) a) Irányszög: olyan síkbeli szög, amelyet választott kezdő irány súrol miközben az óramutató járásával megegyező értelemben az adott iránnyal párhuzamos helyzetbe forgatjuk . Max 360˚ Kezdő irány minden esetben +x irány φ = δ j – δ b => δ j = φ + δ b 5 b) Irányszögátvitel: Ha egy adott irányszögből kiindulva szögek hozzáadásával vagy kivonásával egy újabb irányszöget számítunk ki, akkor irányszögátvitelt végzünk: δ AP = δ CP – ζ δ BP = δ CP - η c) Ellentett irány: Az irányszögátvitel különleges esete az ellentett irány irányszögének kiszámítása, ekkor az irányszög értékét akár hozzáadással, akár levonással 180°-kal kell megváltoztatni, tehát δ BA = δ AB ±180° 20. Egy – egy
ábrán szemléltesse a geodéziai számítások alapfeladatai!(3) a) Első feladat: a síkon a következő :számítsuk ki annak a B pontnak a koordinátáit, amely pont az adott y A , x A koordinátájú A pontból adott δ AB irányszöggel kiinduló egyenesen az A pontból adott t AB távolságban van. 6 y B = y A + Δy Δy = t AB *sinδ AB x B = x A + Δx Δx = t AB *cosδ AB y B = y A + t AB *sinδ AB x B = x A + t AB *cosδ AB b) Második feladat: számítsuk ki az adott y A ,x A koordinátájú A pontból az adott y B , x B koordinátájú B pontra mutató irány δ AB irányszögét és a két pont t AB távolságát. tan AB yB y A xB x A AB arctan yB y A xB x A ,így t AB ( y B y A ) 2 ( x B x A ) 2 A koordináta – különbségek előjele alapján dönthető el ,hogy a δ AB irányszög a négy szögnegyed melyikében van. 21. Egy – egy ábrán szemléltesse az előmetszés, a szög- és az ív- oldal metszés
alapgondolatát!(3) Az ABP háromszögben az ismeretlen P pont helyét az ismert A és B pontokon végzett szögmérés eredményéből a P pontra mutató AP és BP irányok metszéspontjaként határozzuk meg. a) belsőszöges előmetszés: t AB = [(x B – x A )² + (y B – y A )²]½ t AP = t AB *sinβ/ sin(α+β) t BP = t AB *sinα/ sin(α+β) δ AP és δ BP irányszögek számítása tájékozásból: δ AP = δ AB + α δ BP = δ BA – β 7 x P ,y P koordináták számítása poláris pontként: y P = y A + t AP *sinδ AP x P = x A + t AP *cosδ AP Ellenőrzés: y P = y B + t BP *sinδ BP x P = x B + t BP *cosδ BP b) Irányszöges előmetszés: Oldalmetszés Szögoldalmetszés A adott, AP = AC + A számítandó , irányszögátvitellel BP = AP + - Ív oldalmetszés - szinusztételből AP – irányszögátvitellel 22. Egy – egy ábrán szemléltesse a hátrametszés és az ívmetszés alapgondolatát!(3) A hátrametszés
számításánál az ismeretlen koordinátájú (meghatározandó) ponton végzett iránymérésekből három-lehetőleg a horizonton egyenletesen elhelyezkedő-ismert koordinátájú pontra menő irányt választunk ki és ezek felhasználásával számítjuk a hátrametszést. A számítási eljárások közöl a Sossna-féle megoldást ismertetjük: 8 Az ábrából felírható az (1) egyenlet: y S1 – y A = r*sinε x A – x S1 = r*cosε A CAS 1 derékszögű háromszögből: r = a*ctgζ (1)-be helyettesítve kapjuk a (3) egyenletet: y S1 - y A = a*sinεctgζ x A - x S1 = a*cosεctgζ Az ábrából leolvasható: a*sinε = x C – x A a*cosε = y C – y A (3)-ba behelyettesítve: y S1 = y A + (x C – x A )*ctgζ x S1 = x A + (y C – y A )*(-ctgζ ) Ugyanígy levezethető az ábra jobboldalából az S 2 pontra y S2 = y B + (x B – x C )*ctgη x S2 = x B + (y B – y C )*(-ctgη) Az S 1 és S 2 segédpontok koordinátáiból számítható: tgδ S1 , P = tgδ S1 , S2 = yS2 –
yS1/ xS2 – xS1 tgδ CP = tg(δ S1 , P + 90˚) = - 1/ tgδS1 Így a P pont koordinátái S 1 ; C ;illetve C ; S 2 pontokból irányszöges előmetszéssel számítható. Ívmetszés: P meghatározásakor felhasználjuk a mért t BP és t AP távolságokat koszinusz tételből számítható és . 9 Alappontsűrítés 23.Mi okozza az alappontok kerethibáját? Mekkora a relatív kerethiba egy korszerű felsőrendű vízszintes hálózatban?(2) A magasabb hierarchiájú hálózatban a pontok koordinátáit kiegyenlítéssel határozzák meg, a kiegyenlítés pedig a meghatározott mennyiségeknek nem a hibátlan ,hanem a legkisebb középhibájú értékét adja. Az új pontok meghatározásához felhasznált (adott) pontok hálózatában tehát eltérés van a hibátlan koordinátákkal és a kiegyenlített koordinátákkal jellemzett két pont között. A relatív kerethiba átlagos értéke 1/100.000 ,ez két, egymástól 10 km-re lévő pont esetében 10cm-es hibának
felel meg. 24.Mi az adott ponton mért iránysorozat tájékozásának célja? Mit jelent tájékozási, a középtájékozási szög, az irányeltérés és a lineáris eltérés?(5) Célja, hogy a sokszögméréses alappontsűrítéskor a mérési hibák ,és a kerethiba szabálytalan része által terhelt mérési eredményekben a hibák hatását csökkentsük. -tájékozási szög: a limbuszkör zérusvonásának irányszöge -középtájékozási szög: a tájékozási szögek súlyozott számtani középértéke ,amelyet tájékozási állandónak szokás nevezni -irányeltérés: A tájékozási szögek és a középtájékozási szög különbsége. -lineáris eltérés megadja, hogy a tájékozott irányértéknek megfelelő egyenes milyen távolságban halad el a koordinátás pont mellett 25.Sorolja fel a kétszeresen csatlakozó és kétszeresen tájékozott sokszögvonal számításának lépéseit!(5) -végpontbeli VTv irányszög értékét VTV KTK
(n 1) 180 -szögzáróhiba számítása d VTV KTK (n 1) 180 -a szögzáróhiba egyenletes elosztása a törés szögekre, i-edik javított törésszög d n2 -a koordináta tengely irányú vetületeknek meg kell egyezni a kezdő és végpontok megfelelő koordinátáinak különbségével y yV y K i (i ) x x x V K -oldalvetületek számítása y i ,i 1 t i ,i 1 sin ' i ,i 1 xi ,i 1 t i ,i 1 cos i',i 1 10 -koordinátazáróhibák és a belőlük számítható vonalas záróhiba dy ( yV y K ) y dx ( xV x K ) x d dy 2 dx 2 -a sokszögoldal javított vetületei y i ,i 1 (y i ,i 1 ) dy t i ,i 1 t xi ,i 1 (xi ,i 1 ) dx t ,i 1 t -(i+1)-edik sokszögpont koordinátái y i 1 y i
y i ,i 1 xi 1 xi xi ,i 1 26.Sorolja fel a beillesztett sokszögvonal számításának lépéseit!(5) 1-Tetszőlegesen (általában zérusnak választva) felvesszük a kezdő oldal ( ' k1 ) előzetes tájékozott irányértékét, majd a mérési eredményekkel szabad sokszögvonalként kiszámítjuk a sokszögpontok előzetes koordinátáit. A szabad sokszögvonal végpontjaiként megkapjuk a (V) előzetes ponthelyek koordinátáit. 2-Kiszámítjuk mind a (V) előzetes, mind a V tényleges végpont irányszögét és távolságát a K kezdőponttól. Az eredmények a (V) pontra : K (V ) és t K (V ) ( H ) , a V pontra KV és t KV H H szorzótényezőt. Ha a szabad (H ) sokszögvonalat szöggel elforgatjuk, majd m- szeresére nyújtjuk (zsugorítjuk), akkor a vonal (V) végpontja a tényleges V csatlakozó pontba kerül. 4-A sokszögvonal koordinátáinak kiszámításához -a szabad sokszögvonal minden oldalának előzetes
tájékozott irányértékét értékével megnöveljük (ügyelve arra, hogy a előjeles mennyiség) i',i 1 ( i',i 1 ) -a szabad sokszögvonal minden oldalának hosszát m-szeresére változtatjuk: 3-Kiszámítjuk a KV K (V ) elforgatási szöget és az m= ti ,i 1 (t i ,i 1 ) m 5-Kiszámítjuk a végleges oldalvetületeket, majd (folyamatos összegzéssel) a sokszögpontok koordinátáit. Utoljára és ellenőrzésül az ismert V végpont koordinátáit is kiszámítjuk A kiszámított koordináták a számítás élességén belül meg kell egyezzenek a végpont ismert koordinátáival. 11 27.Sokszögvonal csatlakozása magasponthoz (ábrával) , ha az egyetlen tájékozó irány segédpontról mérhető!(4) Ha az 1 sokszögpontból nem mérhető tájékozó irány ,de az S segédpontból mérhető, akkor az ábrán látható szöget számítjuk ki. A K1S háromszögben a KS=b oldal hosszát is
kiszámíthatjuk szinusztétellel, ezzel a KST háromszög ismerté válik, mert a t KT oldal hossza koordinátákból számítható. Szinusztétellel kiszámítjuk az szöget, ezután a keresett K törésszög két háromszög egy-egy külső szögének összegeként vagy különbségeként ,tehát az ismert négy belső szög összegeként vagy páronkénti különbségeként számítható ki 28.Mi a teendő, ha a magasponthoz csatlakozáskor egynél több tájékozó irányt mérünk?(2) Ez esetben K többféleképpen számítható. Ekkor az irányértékeket ,mint külpontos iránymérés eredményeit a K pontra központosítjuk. Ezután végezzük el a tájékozást és K törésszögnek a K' 1 tájékozott irányértéket tekintjük. 29.Sorolja fel a magassági csomópont számításának lépéseit!(5) A csomópont előzetes magasságának meghatározásakor a csomóponti rendszert magassági vonalakra bontjuk. A számítás irányát úgy vesszük fel,
hogy minden vonal végpontja a csomópont legyen . Ezután a kezdőpontok ismert magasságából kiindulva a magasságkülönbségek előzetes értékének összegzésével vonalanként kiszámítjuk a csomópont előzetes magasságát, amelyre annyi értéket kapunk ,ahány magassági vonal találkozik a csomópontban. A csomópont végleges magasságát az előzetes magasságok súlyozott számtani közepeként számítjuk A vonalanként megállapított súly fordítva arányos -szintezés esetén a szakaszhosszak összegével -trig. mag esetén a szakaszhosszak négyzetének összegével 12 30.Sorolja fel a hagyományos 2D ponthálózatban végzett GPS alappontsűrítés észlelési módszereit!(3) -statikus módszer -gyors statikus módszer -ismételt felkeresés módszere -félkinematikus módszer -ugróállásos 31.Mi a GPS-„szintezés” és mitől függ az elérhető pontosság?(5) Ha a pontosság növelése érdekében relatív magasságmeghatározást végzünk, tehát
legalább két vevővel észleljük egyidőben ugyanazokat a műholdakat, akkor az eredmény a két vevőantenna vonatkozási pontjának ellipszoid feletti magasságkülönbsége. Becslések szerint az ellipszoid feletti magasságadatok abszolút pontossága deciméter nagyságrendű, a relatív pontosság 10 km-es távolságra vonatkoztatva 1-2 cm. Ez utóbbi érték korlátozza a GPS-„szintezés” pontosságát. Részletes felmérés 32.Kisalappontok(mérési vonalpontok) koordinátáinak kiszámítása(3) A kisalappontok koordinátáinak kiszámításához mérőszalagos hosszméréssel végigmérjük azokat a vonalakat, amelyeken vonalpontként kisalappontot jelöltünk meg és folyamatos méretként leolvassuk a kisalappont(ok) helyzetét (távolságát a vonal egyik végpontjától ). A vonalat teljes hosszában végigmérjük, a végpontnál leolvasott (t AB ) távolságot, az ún. végméretet is feljegyezzük. 13 A és B pontok egyenesén az A ponttól t K
távolságban lévő K kisalappont koordinátái y K =y A + t K *sin AB és x K = x A + t K * cos AB A hosszméréskor kapott (t AB ) végméret általában nem egyezik meg a koordinátákból számított t AB távolsággal. y yA y yA r B sin AB B , (t AB ) t AB helyett cos AB xB x A t AB y K =y A + t K *r m és xB x A (t AB ) x K =x A + t K *m Ha az adott mérési vonalon több kisalappontot tűztek ki, akkor a pontok koordinátái általában folyamatos számítással: minden kisalappont koordinátáit a közvetlenül megelőző kisalappont koordinátáiból és a köztük lévő távolsággal arányos y és x koordináta- növekményből határozzuk meg. A koordináták folyamatos számításának képletei az i-edik kisalappontra: y i =y i-1 + t i-1 * r x i =x i-1 + t i-1,i * m 33.Derékszögű koordinátaméréssel bemért pontok koordinátáinak kiszámítása(5) Az A és B pontok egyenesére mint mérési vonalra
az a P és b P derékszögű méretekkel bemért P pont koordinátái. y P = y A + y = y A + a P * sin AB – b P cos AB x P = x A + x = x A + a P * cos AB + b P sin AB 14 Erre az esetre is érvényesek a mérési vonalpont koordinátáinak kiszámításánál említettek, tehát az abcissza-mérés záróhibájának eloszlására az yP = yA + aP * r – bP m xP = xA + aP * m + bP r Képletekkel számolunk , ahol r yB y A (a B ) m xB x A (a B ) és (a B ) a részletmérés végrehajtásakor a B végpontnál leolvasott végméret. 34.Ábra segítségével szemléltesse a tahimetria alapgondolatát, részletpontok koordinátáinak és magasságának kiszámítását!(5) 15 A tahimetria (magyarul: gyorsmérés ) elnevezés onnan származik, hogy a részletpontokat mind vízszintes, mind pedig magassági értelemben egyértelműen meghatározó geometriai adatokat kevés mérési munkával, tehát gyorsan állíthatjuk elő. t v t f *
sin z t f cos ' y P y A t v * sin AP ' AP AT AP ' x P x A t v * cos AB m = t f * cos z = t f sin M P = M A + h +m – l 35.Hogyan gyorsítható a távolság és a magasság kiszámítása redukáló diagramtahiméterrel végzet mérés esetén?(4) A redukáló tahiméterekkel végzett lécleolvasásokból a szokásos műveletekkel a ferde távolság helyett a vízszintesre redukált távolság számítható ki. Ilyen a diagram-tahiméter is A szálakon való leolvasás után egyből a redukált távolságot lehet kiszámítani: távmérőszálak. 2 (függőleges léctartás mellett) t v = c * cos + k l cos (vízszintes léctartás mellett) t v = c * cos + k l cos (vízszintesre redukált távolság) t v = t f * cos t v = k t (l t - l o ) m = c * sin + k l sin cos m = c * sin + k l sin m = t f * sin m = k m * (l m - l o ) - l o
(függőleges léctartás mellett) (vízszintes léctartás mellett) c: a távmérő összeadóállandója k: a távmérő szorzóállandója l: a lécleolvasások különbsége : az irányvonal magassági szöge 36.Elektronikus tahiméterrel végzett méréskor milyen redukciókat és javításokat kap a ferde távolság, a vízszintes és a magassági körleolvasás? A javított mennyiségekből milyen további mennyiségek számíthatók?(5) - A ferde távolság megjavítása az összeadó- és szorzóállandó, továbbá a meteorológiai javítás szorzótényezője előzetesen bevitt értékével. Egyes műszerek esetén az utóbbi szorzótényezőt is a számító egység számítja ki a műszerállásponton megmért hőmérséklet és légnyomás bevitele után. - A vízszintes és a magassági körleolvasás megjavítása a kollimációhiba és az indexhiba miatti javítás előzetesen bevitt, vagy külön mérési programmal meghatározott értékével történik.
Földgörbület refrakció hatása 16 37.Mit jelent a szabad álláspont-meghatározás programmal vezérelt méréskor?(4) Szabad álláspont- meghatározás, azaz a műszerálláspont ismeretlen koordinátáinak meghatározása ismert pontokra végzett szögmérés és távmérés eredményeiből. Ha több adatot mértünk, mint amennyi egyértelmű koordináta-számításhoz szükséges, akkor a számító egység kiegyenlíti a koordinátákat, azaz a kiszámított és kijelzett (rögzített) koordináták a lehető legkisebb mértékben térnek el az egyes meghatározások eredményétől. Az álláspont kiegyenlített koordinátáin kívül a számító egység távmérés esetén kiszámítja a felhasznált pontok kerethibájától függő méretarány tényező értékét, végül tájékozza a vízszintes kört, azaz kiszámítja a ( közép )tájékozási szöget, amelynek értékét hozzáadja a további vízszintes körleolvasásokhoz. Térképek, térképszerkesztés
38. Mit jelent a térkép alaki, helyzeti és tartalmi pontossága? (3) - Alaki pontosság: Az ábrázolt alakzat valódi alakja és térképi rajzolata azonosságának mértéke. - Helyzeti pontosság: Az ábrázolt alakzatok természetbeli és térképen ábrázolt helyzete azonosságának mértéke. - Tartalmi pontosság: (Tartalmi azonosság számszerűen nem jellemezhető!) Terepen végzett helyszíneléssel győződünk meg arról, hogy: - az ábrázolás szempontjából lényeges valamennyi valóságos alakzat megfelelője megtalálható-e a térképen; - a térképen ábrázolt valamennyi alakzat megfelelője megtalálható-e a valóságban; - a valóságban meglévő és a térképen ábrázolt alakzatok megfelelnek-e egymásnak; 39. Írja fel a koordinátákból kiszámítható terület számítási képletét! (3) n 2T = xi yi 1 yi 1 1 n vagy 2T = yi xi 1 xi 1 1 40. Melyek a mérőkamara belső tájékozási adatai és
melyek a külső adatok? (4) - Belső adatok: (3): A vetítési centrum 3 koordinátája képkoordináta-rendszerben. - Külső adatok (6): -A vetítési centrum 3 koordinátája geodéziai koordináta-rendszerben. -A képkoordináta rendszer 3 tengelyének állása a geodéziai koordinátarendszerben. 41. Miben különbözik az analóg és az analitikus kiértékelés? (2) - Analóg: Egy vetítő berendezés megfelelő beállítás után a képet egy sík felületére vetíti úgy, hogy a síkon a terep arányosan kisebbített megfelelője keletkezzen. - Analitikus: A képkoordinátákból számíthatók a tereppontok geodéziai koordinátái. 42. Milyen pont használható illesztőpontnak és mi az illesztőpontok szerepe? (2) Illesztőpont: Képen jól azonosítható, a kép sarokpontjaihoz közel eső pont. Fototérkép készítéséhez használjuk őket, mégpedig úgy, hogy ezeknek a kép- és geodéziai koordinátáik is ismertek. majd addig forgatjuk a képet az illesztőpontos
lapon, míg azok fedésbe nem kerülnek. 17 43. Mi okoz projektív torzulást és hogyan küszöbölhető ki? (4) A projektív torzulás képdőlés okozta torzulás. (A képsík és a tárgysík egymással nem párhuzamos.) A projektív torzulás megszüntetéséhez a felvétel kiértékelésékor a képalkotó (vetítési centrumon átmenő) sugárnyalábot vissza kell állítani. Ehhez ismernünk kell: - a mérőkamara 3 belső tájékozási adatát; - a vetítési centrum 3 koordinátáját a tárgy koordináta-rendszerében; - a képkoordináta-rendszer 3 tengelyének állását a geodéziai koordináta-rendszerben; A kép térbeli helyzetét a mérőkamara 3 belső tájékozási adata mellett a 6 külső tájékozási adat egyértelműen meghatározza. A 9 adat ismeretében a képalkotó sugárnyaláb visszaállítható. 44. Mi okoz perspektív torzulást és hogyan küszöbölhető ki? (4) A perspektív torzulás a domborzat okozta torzulás. A differenciális
képátalakítással kiküszöbölhető. A módszer alapgondolata, hogy bármely felület felbontható elemi felületdarabokra, amelyek külön-külön más síknak tekinthetők. A terepi vonaldarab számítógépen tárolt közepes magasságával küszöbölhető ki. 45. Hány tájékozási adat és hány illesztőpont szükséges a sztereo képpár teljes tájékozásához? (4) A két kép teljes tájékozásához összesen 6 belső és 12 külső adat szükséges. A belső adatokat ismerjük és felhasználjuk a vetítőkamarák beállításához. A 12 külső adatból a relatív tájékozás 5 szögadatát tapasztalati úton állapítjuk meg a térbeli modell előállításával. A fennmaradó 7 külső adatot a két vízszintes értelemben meghatározott illesztőpont (4 adat) és a 3 magassági értelemben meghatározott illesztőpont helyettesíti. 46. A térképek geometriai adatainak előállítása fotogrammetriával (táblázat) (4) Előállított adat Síkrajzi Terep
sík tagolt Síkrajzi és magassági tagolt Eljárás Eszköz Jellemző termék analóg analitikus analóg analitikus analóg analitikus optikai képátalakító monokomparátor differenciális képátalakító sztereokomparátor térkiértékelő berendezés analitikus plotter grafikus (fototérkép) digitális (adatállomány) grafikus (ortofotó) digitális (adatállomány) grafikus (szintvonalas térkép) digitális (térkép) 47. A globális távérzékelés jellemzői (felsorolás) (2) 1.) A felvételt készítő berendezés meghatározott pályán keringő műholdon van 2.) A felvétel nem csak a látható fény hullámhossz-tartományában készül 3.) A felvétel-készítés eredménye a képpontokba érkező sugárzási energia nagyságát kifejező számérték, a felvétel tehát digitális. 4.) A digitális felvétel rádiócsatornán jut a előfeldolgozó központba, majd onnan mágneses adathordozón kerül a felhasználókhoz. 18 48. A műholdas
távérzékelés előnyei (felsorolás) (2) 1.) Az adatgyűjtés rendkívül gyors 2.) Az adatgyűjtés szabályos időközönként ismétlődik 3.) Az adatrendszer nagy (országrésznyi) területre nézve is homogén 4.) A digitális adatok számítógéppel feldolgozhatók 49. A felbontás értelmezése a távérzékelésben (3) - Geometriai felbontás: Egy képelemnek (pixelnek) megfelelő valós négyzet alakú terület. - Spektrális felbontás: A színképnek hány sávjában gyűjt adatot. - Dinamikai felbontás: Hány árnyalatot különböztet meg a készülék. 50. Digitális képfeldolgozás: a statisztikai döntéselmélet tanulásos módszere (5) A vizsgált területen olyan kis területrészeket választunk ki, amelyeken az adott szempontok szerinti osztályba sorolás valamennyi osztálya előfordul. Ha feltételezzük, hogy az azonos osztályokba sorolt területek spektrális tulajdonságai is azonosak, akkor a felvétel nem ismert részletei is osztályokba
sorolhatók. A helyességet ellenőrizhetjük tesztterületek kiválasztásával Ezek osztályba sorolását ismerjük, de ezt csak az osztályba sorolás ellenőrzésére használjuk. Mindkét területről (tanuló, teszt) hitelesítő (referencia-) adatokat kell gyűjteni. A feldolgozó számítógép a tanulóterületek egyazon tematikus osztályba tartozó képelemére vonatkozóan előállítja a sugárzási energia eloszlásának sűrűségfüggvényét. Így a nem ismert részek sugárzásából kiadja, hogy tematikailag hova tartozik. Az osztályba sorolás minősítésének jellemzői: - Tévesztési táblázat: A tematikus hibák számszerű összege. helyes - Találati arány: 100% összes - Hibatérkép: Hibák területi eloszlása Kitűzések 51.Egyenes műszeres kitűzése egyenesbe intéssel és egyenesbe állítással (4 pont) 52. Koordinátákkal adott pontok derékszögű kitűzési méreteinek kiszámítása (5 pont) a p y p y a sin AB
x p xa cos AB b p y p y a cos AB x p xa sin AB (Ha több pont kitűzési méreteit számítjuk ugyanarra a kitűzési vonalra, akkor az i-edik pont kitűzési méretei: ai ai 1 yi 1,i sin AB xi 1,i cos AB bi bi 1 yi 1,i cos AB xi 1,i sin AB és y y y , x x x ) B A B A 53.Kitűzés poláris méretekkel (2 pont) A kitűzendő pont koordinátáinak ismeretében a pont közelében levő alapponthoz és az alappontból mérhető tájékozó ponthoz képest a pont helyét kijelölő vízszintes szöget és távolságot keressük. 19 54.Körív főpontjainak kitűzése, ha a törésponton műszerrel nem állhatunk fel (5 pont) Az érintőket metsző és a JK ponthoz közeli egyenes A' és B' metszéspontjairól végezzük el a kitűzést. Az "r" sugáron kívül az és szögeket és az
A'B' egyenes szakasz "e" hosszát is ismerjük, = + és = 180- segítségével az érintők t hossza t= r*tg(/2) is kiszámítható. A JE és JV pontokat a megfelelő egyenesen tűzzük ki az A' pontból, "a" távolság = t- (e/sin)*sin. A B pontból pedig b' = t- (e/sin)*sin távolság kimérésével. A JK pontot úgy tűzzük ki, hogy JE és JV pontokból T töréspont irányában a c=e*tg (/4) távolság kimérésével kitűzzük az A és B pontokat, a JK pont az AB=2c távolságot felezi. 55.Körív részletpontjai kitűzésének valamelyik módszere (3 pont) A JE pontbeli érintőből való kitűzésnek abban az esetében, amikor a részletpontok y tengelyre vonatkozó vetületei egymástól egyenlő távolságban vannak, és a kitűzendő részpontok távolsága n. y= y JV /n, ahol y JV = r*sin. A k-dik részletpont kitűzési méretei: y k k y és xk r r 2 y k2
Építmény- és talajmozgások vizsgálata. 56. Sorolja fel a geodéziai mozgásvizsgálat jellemzőit! (3) 1.A vizsgált tárgyat néhány kijelölt pontjával azonosítjuk A pontok számát úgy kell megválasztani , hogy az adott mérési módszerrel az összes pont helyzetének meghatározásához szükséges idő alatt a vizsgált tárgyat mozdulatlannak tekintsük. Kevés pontról lévén szó, azokat a várható elmozdulás , vagy alakváltozás szempontjából mértékadó helyeken kell kiválasztani. A vizsgált pontok kiválasztásának másik fontos szempontja, hogy fennmaradásuk és mérésre használhatóságuk a vizsgálat tejes idejére( akár évekig ) biztosítva legyen. 2.A vizsgálat módszerét úgy választjuk meg, hogy a vizsgálati pontok elmozdulása a kellőpontossággal kimutatható legyen. Ha ismerjük a várható elmozdulások irányát, akkor a pontok helyzetét csak ebben az irányban kell pontosan meghatározni. 3.A vizsgálati pontok helyzetét
általában mozdulatlannak tekintett viszonyítási pontokhoz képest határozzuk meg, bár az eredmények feldolgozásának vannak olyan módszerei is, amelyekkel a viszonyítási pontok egy részének esetleges elmozdulását is valószínűsíthetjük. 4.A vizsgálati pontok helyzetét a vizsgálat kezdetén végrehajtott alapméréssel rögzített állapothoz viszonyítjuk. 5.Rendkívül fontos az eredmények helyes értelmezése Elegendő megemlíteni, hogy egy pont vízszintes elmozdulása lehet eltolódás, de lehet az elmozdulás irányára merőleges tengely körüli elfordulás eredménye is. A gyakorlatban általában többféle mozgásvizsgálati módszer együttes vizsgálatával döntjük el, hogy milyen típusú mozgás következett be. 57.Sorolja fel a vízszintes elmozdulások meghatározásának módszereit!(4) A viszonyítási pontok helyét mozgásmentes területen kell kiválasztani és mozdulatlanságukat időről-időre ellenőrizni kell. A választott
mozgásvizsgálati módszertől függ, hogy a vizsgálati pontok csupán irányzott pontok vagy műszerálláspontok is legyenek. A vízszintes elmozdulások meghatározásának számos módszere ismert. - Egyenes mérés - Háromszögelés - Sokszögelés - Vetítés 20 58.Az ingás elektromos dőlésmérők működési elve(4) Magas karcsútoronyszerű építmények elmozdulástól független dőlése vetítéssel vagy elektromos dőlésmérők segítségével határozható meg. Az elektromos dőlésmérők közös jellemzője, hogy a mérendő dőléssel (hajlással) arányos villamos jelet állítanak elő, amelyet megmérve a műszer hitelesítési adatainak felhasználásával, tapasztalati úton következtethetünk a dőlés ( hajlás) megváltozására. A ingás dőlésmérők működésének alapja, hogy a fizikai inga tömegközéppontjába a felfüggesztési pont függőlegesben van, ha az ingára csupán a nehézségi erő hat. Ez a fizikai inga ferromágneses anyagból
készült rúd , amely két összekapcsolt induktív tekercs között vasmagként van felfüggesztve. A tekercset váltóáram táplálja Az érzékenység fokozása érdekében Wheaston-hídba kötik. A vasmag kitérése esetén változik a tekercs induktivitása amely az elmozdulással arányos. A műszer az elmozdulással arányos áramot mér, mely a tapasztalati beosztásból leolvasható. A nullára kalibrálást egy változtatható ellenállás segítségével végezzük. 59.Süllyedésmérések tervezése: a műszerállások számának meghatározása(5) A tervezés a vizsgálati pontok helyének kiválasztásával kezdődik. Lényeges, hogy a vizsgálati pontokat egy-egy szerkezeti elemen a várható legnagyobb függőleges elmozdulások helyén jelöljük ki. A szomszédos vizsgálati pontok magasságkülönbsége minél kisebb legyen Lehetőség szerint biztosítani kell a pontok tartós fennmaradását, hogy az épülő műtárgy süllyedésmérését az üzemelés idején
is ugyanazokra a jelekre végezhessük. Optikai szintezést feltételezve a pontok helyét úgy kell kiválasztani, hogy a pontokat szintezési vonal(ak)ba foglalhassuk, ne legyen szükség kötőpontokra, a szintezőműszert a szomszédos vizsgálati pontoktól egyenlő és legfeljebb 25m-es távolságban fel lehessen állítani ( a műszerálláspontok tervezett helyét is meg kell jelölni ). A mozdulatlannak tekintett viszonyítási pontokat gyors ellenőrzésük érdekében ún. fürtökben kell telepíteni, azaz legalább három pontot kell úgy elhelyezni, hogy a pontokra helyezett szintezőléc egyetlen műszerállásból és legfeljebb 25 m-es műszer-léc távolságból leolvasható legyen. Egy-egy műtárgy süllyedésvizsgálatához legalább két fürtöt kell kialakítani 60.A mozgásvizsgálat eredményeinek közlése(5) A mozgásvizsgálat eredményeinek felhasználója rendszerint folyamatos tájékozást igényel a bekövetkezett elmozdulásokról, ezért az
eredményeket minden vizsgálati mérést követően közölni kell a felhasználóval. Az eredményképzés legegyszerűbb módja olyan táblázat összeállítása, amelynek két rovatában az elmozdulás értéke szerepel egyrészt a megelőző vizsgálati méréshez, másrészt a kezdeti állapotot rögzítő alapméréshez képest. Ha a várható elmozdulások iránya ismert, akkor a pontok vízszintes elmozdulásának csak az adott irányba eső összetevőjét szokás megadni. Az elmozdulás folyamatának szemléltetésére egy-egy táblázatos kimutatás a megelőző összes vizsgálati mérésből meghatározott elmozdulásértéket is tartalmazhatja. A grafikus ábrázolás általában szemléletesebb a táblázatos adatoknál. A vízszintes elmozdulásokat az elmozdulás irányát is megmutató vektorokkal ábrázoljuk. Süllyedésmérés grafikus eredményközlésekor az egyes vizsgálati pontok süllyedését az eltelt idő függvényében szokás ábrázolni. 21
szintezőlibella legyen igazított a távcső irányvonalához l sz I 4.) Közel vízszintes terepen megjelölünk két pontot egymástól "t" távolságban, a) A vizsgált műszert felállítjuk a pontoktól egyenlő távolságban, majd meghatározzuk a két pont "m" magasságkülönbségét (ez mentes az irányvonal ferdeség szabályos hibahatásától). b) A szintezőműszert áthelyezzük a két pont szakaszán kívülre, egymás után megirányozzuk a "hátra", majd az "előre" ponton felállított lécet, leolvassuk az l' h és l' e értékeket, ebből az irányvonal ferdeség miatt hibás magasságkülönbség: m' = l' h - l' e . c) Az irányvonal ferdeség meghatározása (): ( = l' e + m - l' h = m - (l' h - l' e ) = m - m') ( = m - m') tg = /t = (m - m')/t 1 3.Miből származik és hogyan nyilvánul meg a
horizontferdeség? (2 pont) Abból származik, hogy hibás a műszerben a kompenzálás, és nem teljesül a kompenzátor működési egyenlete és az állótengely sem függőleges. A kompenzált irányvonalak ilyenkor a kompenzálási ponton átmenő ferde horizont síkot alkotnak, ez a horizont ferdeség. 4.Sorolja fel a szintezés szabályos hibaforrásait és hatásuk kiküszöbölésének módját!(5) 1.) A szintfelület görbültségének hatása - egy-egy műszerállásban a műszerrel a lécpontoktól egyenlő távolságban kell felállni! Műszerhibák: 2.) Irányvonal- ferdeség - a szintezőlibella buborékját minden leolvasás előtt gondosan középre kell állítani és középen maradását leolvasás után ellenőrizni kell; a műszert és különösen a szintezőlibellát védeni kell az egyoldalú hőhatástól. 3.) Horizontferdeség - a magasságkülönbséget minden műszerállásban kétszer mérjük meg és a második mérés előtt az állótengely dőlését a
függőlegeshez képest ellentettjére változtatjuk. 4.) Az állótengely nem függőleges + hibás a kompenzátor Léchibák: 5.) A fekvőtengely külpontossága - az állótengely gondos függőlegessé tételével csökkenthető. 6.) Talppont hiba - a szintezési vonalban a műszerállások száma legyen páros 7.) A lécosztás hibái - a szintezőlécet időnként komparálni kell! 8.) Lécferdeség - a szintezőléc függőlegességét igazított szelencés libella használatával, a léc mozdulatlanságát kitámasztó rudakkal kell biztosítani. Külső körülmények okozta hibák: 9.) Műszersüllyedés - a szintezést ellentétes irányban haladva megismételjük 10.) Lécsüllyedés - a lécet szabatos szintezésnél a talajba vert gömbölyűfejű vascövekre, egyébként facövekre vert gömbölyűfejű szegre vagy szintezősarura kell helyezni, a szintezést egyenletes sebességgel, oda-vissza értelemben kell végrehajtani. 11.) Szintezési refrakció - szintezni csak
arra alkalmas (léglengéstől és légrezgéstől mentes) időben szabad, az irányvonal nem haladhat a talajhoz túlságosan közel (30-50 cm min. lécleolvasás) és a műszer - léc távolság nem lehet túl nagy (70-40 m max) 5.A szintezés apriori km-es középhibája (képlet) (3 pont) mkm 1000 d L= 1 km - re d a műszer-léc távolság [m] az irányvonal középingadozása [radián] (Az eredmény méterben adódik.) 6.Mi a trigonometriai magasságmérés előnye és hátránya a szintezéssel szemben? (2 pont) Előnyei: - rövid távon nagy magasságkülönbség meghatározására is alkalmas - gyors, mert nagy távolságokban levő pontok magasságkülönbsége is meghatározható egy műszerállásban - megközelíthetetlen pontok magasságának meghatározására is alkalmas Hátrányai: - a meghatározott pont kevésbé pontos - ismerni kell a két pont közötti távolságot 2 7.Milyen előnnyel jár a trigonometriai szintezés? (1 pont) Olyankor is
alkalmazható, ha a két pont nem látszik össze, vagy a teodolitot egyik ponton sem tudjuk felállítani. 8.Mekkora a földgörbület és a refrakció hatása külön-külön a trigonometriai magasságmérés eredményére x km távolságon? (3 pont) - a földgörbület hatása: d 2 x2 2 R 2 R - 0,4 km x 5 km ahol R a közepes földsugár (6380km) a refrakció hatása: d 2 d 2k x 2k 2 2R 2R ahol k a refrakciós együttható érték (k = +0,13-nak szokás venni) 9.Mivel arányos a m magasságkülönbség m középhibája és p súlya, ha m értékét szintezéssel / trig. Magasságméréssel határoztuk meg? Hogyan osztja el a szintezett / trig. Magasságméréssel mért magassági vonal záróhibáját? (5 pont) Szintezés: mm * L d - a műszer-léc távolsággal - az irányvonal középingadozásával Trigonometriai magasságmérés: mm
2,5 * d - a vízszintes távolsággal - a magassági szög középhibájával - a refrakciós együtthatóval A záróhibát a távolságok arányában osztjuk el. Térbeli helymeghatározás navigációs műholdrendszerrel 10.Mit jelent a hozzáférés korlátozása(S/A) és az A-S? (3 ) S/A: Mivel a C/A kód túl pontos( ezért veszélyes ) navigációt tett lehetővé, a pontosságot mesterségesen rontották le. - 1. A frekvencia- etalonnak jelét látszólag véletlenszerűen változtatták, így akik nem ismerték a szabályszerűséget azoknak bizonytalanná tette a helymeghatározást. - 2. A pálya- és órakorrekciók sugárzását letiltották, ennek eredményeképpen a mérés idején a műhold helyzete csak közelítő pontossággal ismert, tehát a földi vevő helyzetét sem lehet pontosan tudni. A-S: Ezen intézkedés lényege, hogy a P kódot egy ún. Y kóddá konvertálják, így ezt a kódot csak azok használhatják akiknek birtokában van az átszámolás
algoritmusa, ezzel elérhető hogy ne élhessen vissza akárki a GPS-szel. 3 11.Az időméréses és fázisméréses távolságmeghatározás alapképlete vagy közvetítő egyenlete. (4) Az időméréses távolságmeghatározás képlete: US=U(GPS)+S U T =U(GPS)+ T S Ahol: U a jel kibocsátásának pillanata a műhold órája szerint. U T A jel vételének pillanata a vevő órája szerint S, T a két óra eltérése egy közös GPS időtől. A két óra eltérése miatti ál távolság R=v(U T - US)=+v*r Ahol v az elektromágneses sugárzás ismertnek tekintett terjedési sebessége. a valódi távolság r= T - S az ún. kölcsönös óraállás A helymeghatározás =(S- T ) általános képletében T három ismeretlen összetevője mellett a kölcsönös óraállás a negyedik ismeretlen. Bár ez az ismeretlen bizonyos esetekben kiküszöbölhető, a helymeghatározáshoz négy pszeudo-távolságot kell egyidejűleg
megmérni. Fázisméréses távolságmeghatározás: f=v/ ahol f a periodikus jel frekvenciája v a sebessége pedig a hullámhossza. f=/t ahol a pillanatnyi rezgésállapot =fdt=f*t ,ha t 0 =0 (kezdő fázis értéke 0 ) Ugyanabban a pillanatban a jelforrástól távolságban a fázishelyzet f*t ahol t a távolság megtételéhez szükséges idő: t =v A leírtak alapján a t időpontban kibocsátott és ugyanebben az időpillanatban a jelforrástól távolságban vett jel kölcsönös fázishelyzete: t - =(t- t )=f(t-v) 12.Az időmérés és a fázismérés távolságmeghatározással elérhető pontosság(2) Időméréses C/A kódban 3 m, P kódban 0,3 m. Fázismérésnél 2 mm. 13.Mit jelent az abszolút és a relatív helymeghatározás?(2) Koordinátákat szolgáltató helymeghatározása abszolút. Koordináta különbségeket szolgáltató helymeghatározás relatív. 14.Mit jelent
a statikus és kinematikus helymeghatározás?(2) Ha az észlelés ideje alatt a vevő mozdulatlan, akkor statikus, ha a vevő mozog akkor kinematikus helymeghatározásról beszélünk. 15.Mit jelent a valós idejű és az utólagos feldolgozás?(2) A szigorú értelemben vett valós idejű feldolgozás az egyes elemi mérések eredményeiből általában azonnal szolgáltat helymeghatározó adatokat, de valós idejűnek tekintjük az adatfeldolgozást akkor is, ha az eredmények még az észlelés helyén megszületnek. Utófeldolgozással a mérés helyszínén általában több helyen rögzített adatokat együttesen dolgozzák fel irodában az észlelési programot követően. 16.Mit jelent a DOP és mit jellemzünk vele?(2) A DOP a műholdak geometriai elhelyezkedéséből adódó, középhibát szorzó tényező, mindig 1-nél nagyobb szám. A térbeli helymeghatározás pontosságát lehet vele jellemezni 4 17.Milyen durva hiba hatások terhelik a műholdas
helymeghatározás eredményét és hogyan küszöbölhető ki ezek a hibahatások?(2) Durva hibát okoz a többutas terjedés, ami a direkt terjedési és a visszaverődött jelek interferenciája. A többbutas terjedés veszélye elkerülhető az álláspont körültekintő megválasztásával. Fázisméréses távolságmeghatározás esetén durva hibát okoz az ún ciklusugrás., ha a ciklusszámlálás ideje alatt a műhold tereptárgyak takarásába kerül A ciklusugrás is az álláspont körültekintő megválasztásával kerülhető el, de utólagos adatfeldolgozás estén megfelelő szoftver alkalmazásával a vételből kimarad ciklusszám általában meghatározható. 18.Mit jelent a differenciális/kinematikus helymeghatározás valós időben(5) A helymeghatározás differenciális módszere esetében a sugárzott adatok általában az egyes műholdakra vonatkozó távolságkülönbségek, ritkábban koordinátakülönbségek. A kinematikus módszer estében a mozdulatlan
vevő átjátszó adóként működve saját észlelési adatait sugározza a mozgó vevők felé. Számítások vetületi síkon 19. Mi az irányszög, mi az irányszögátvitel és mi az ellentett irány?(3) a) Irányszög: olyan síkbeli szög, amelyet választott kezdő irány súrol miközben az óramutató járásával megegyező értelemben az adott iránnyal párhuzamos helyzetbe forgatjuk . Max 360˚ Kezdő irány minden esetben +x irány φ = δ j – δ b => δ j = φ + δ b 5 b) Irányszögátvitel: Ha egy adott irányszögből kiindulva szögek hozzáadásával vagy kivonásával egy újabb irányszöget számítunk ki, akkor irányszögátvitelt végzünk: δ AP = δ CP – ζ δ BP = δ CP - η c) Ellentett irány: Az irányszögátvitel különleges esete az ellentett irány irányszögének kiszámítása, ekkor az irányszög értékét akár hozzáadással, akár levonással 180°-kal kell megváltoztatni, tehát δ BA = δ AB ±180° 20. Egy – egy
ábrán szemléltesse a geodéziai számítások alapfeladatai!(3) a) Első feladat: a síkon a következő :számítsuk ki annak a B pontnak a koordinátáit, amely pont az adott y A , x A koordinátájú A pontból adott δ AB irányszöggel kiinduló egyenesen az A pontból adott t AB távolságban van. 6 y B = y A + Δy Δy = t AB *sinδ AB x B = x A + Δx Δx = t AB *cosδ AB y B = y A + t AB *sinδ AB x B = x A + t AB *cosδ AB b) Második feladat: számítsuk ki az adott y A ,x A koordinátájú A pontból az adott y B , x B koordinátájú B pontra mutató irány δ AB irányszögét és a két pont t AB távolságát. tan AB yB y A xB x A AB arctan yB y A xB x A ,így t AB ( y B y A ) 2 ( x B x A ) 2 A koordináta – különbségek előjele alapján dönthető el ,hogy a δ AB irányszög a négy szögnegyed melyikében van. 21. Egy – egy ábrán szemléltesse az előmetszés, a szög- és az ív- oldal metszés
alapgondolatát!(3) Az ABP háromszögben az ismeretlen P pont helyét az ismert A és B pontokon végzett szögmérés eredményéből a P pontra mutató AP és BP irányok metszéspontjaként határozzuk meg. a) belsőszöges előmetszés: t AB = [(x B – x A )² + (y B – y A )²]½ t AP = t AB *sinβ/ sin(α+β) t BP = t AB *sinα/ sin(α+β) δ AP és δ BP irányszögek számítása tájékozásból: δ AP = δ AB + α δ BP = δ BA – β 7 x P ,y P koordináták számítása poláris pontként: y P = y A + t AP *sinδ AP x P = x A + t AP *cosδ AP Ellenőrzés: y P = y B + t BP *sinδ BP x P = x B + t BP *cosδ BP b) Irányszöges előmetszés: Oldalmetszés Szögoldalmetszés A adott, AP = AC + A számítandó , irányszögátvitellel BP = AP + - Ív oldalmetszés - szinusztételből AP – irányszögátvitellel 22. Egy – egy ábrán szemléltesse a hátrametszés és az ívmetszés alapgondolatát!(3) A hátrametszés
számításánál az ismeretlen koordinátájú (meghatározandó) ponton végzett iránymérésekből három-lehetőleg a horizonton egyenletesen elhelyezkedő-ismert koordinátájú pontra menő irányt választunk ki és ezek felhasználásával számítjuk a hátrametszést. A számítási eljárások közöl a Sossna-féle megoldást ismertetjük: 8 Az ábrából felírható az (1) egyenlet: y S1 – y A = r*sinε x A – x S1 = r*cosε A CAS 1 derékszögű háromszögből: r = a*ctgζ (1)-be helyettesítve kapjuk a (3) egyenletet: y S1 - y A = a*sinεctgζ x A - x S1 = a*cosεctgζ Az ábrából leolvasható: a*sinε = x C – x A a*cosε = y C – y A (3)-ba behelyettesítve: y S1 = y A + (x C – x A )*ctgζ x S1 = x A + (y C – y A )*(-ctgζ ) Ugyanígy levezethető az ábra jobboldalából az S 2 pontra y S2 = y B + (x B – x C )*ctgη x S2 = x B + (y B – y C )*(-ctgη) Az S 1 és S 2 segédpontok koordinátáiból számítható: tgδ S1 , P = tgδ S1 , S2 = yS2 –
yS1/ xS2 – xS1 tgδ CP = tg(δ S1 , P + 90˚) = - 1/ tgδS1 Így a P pont koordinátái S 1 ; C ;illetve C ; S 2 pontokból irányszöges előmetszéssel számítható. Ívmetszés: P meghatározásakor felhasználjuk a mért t BP és t AP távolságokat koszinusz tételből számítható és . 9 Alappontsűrítés 23.Mi okozza az alappontok kerethibáját? Mekkora a relatív kerethiba egy korszerű felsőrendű vízszintes hálózatban?(2) A magasabb hierarchiájú hálózatban a pontok koordinátáit kiegyenlítéssel határozzák meg, a kiegyenlítés pedig a meghatározott mennyiségeknek nem a hibátlan ,hanem a legkisebb középhibájú értékét adja. Az új pontok meghatározásához felhasznált (adott) pontok hálózatában tehát eltérés van a hibátlan koordinátákkal és a kiegyenlített koordinátákkal jellemzett két pont között. A relatív kerethiba átlagos értéke 1/100.000 ,ez két, egymástól 10 km-re lévő pont esetében 10cm-es hibának
felel meg. 24.Mi az adott ponton mért iránysorozat tájékozásának célja? Mit jelent tájékozási, a középtájékozási szög, az irányeltérés és a lineáris eltérés?(5) Célja, hogy a sokszögméréses alappontsűrítéskor a mérési hibák ,és a kerethiba szabálytalan része által terhelt mérési eredményekben a hibák hatását csökkentsük. -tájékozási szög: a limbuszkör zérusvonásának irányszöge -középtájékozási szög: a tájékozási szögek súlyozott számtani középértéke ,amelyet tájékozási állandónak szokás nevezni -irányeltérés: A tájékozási szögek és a középtájékozási szög különbsége. -lineáris eltérés megadja, hogy a tájékozott irányértéknek megfelelő egyenes milyen távolságban halad el a koordinátás pont mellett 25.Sorolja fel a kétszeresen csatlakozó és kétszeresen tájékozott sokszögvonal számításának lépéseit!(5) -végpontbeli VTv irányszög értékét VTV KTK
(n 1) 180 -szögzáróhiba számítása d VTV KTK (n 1) 180 -a szögzáróhiba egyenletes elosztása a törés szögekre, i-edik javított törésszög d n2 -a koordináta tengely irányú vetületeknek meg kell egyezni a kezdő és végpontok megfelelő koordinátáinak különbségével y yV y K i (i ) x x x V K -oldalvetületek számítása y i ,i 1 t i ,i 1 sin ' i ,i 1 xi ,i 1 t i ,i 1 cos i',i 1 10 -koordinátazáróhibák és a belőlük számítható vonalas záróhiba dy ( yV y K ) y dx ( xV x K ) x d dy 2 dx 2 -a sokszögoldal javított vetületei y i ,i 1 (y i ,i 1 ) dy t i ,i 1 t xi ,i 1 (xi ,i 1 ) dx t ,i 1 t -(i+1)-edik sokszögpont koordinátái y i 1 y i
y i ,i 1 xi 1 xi xi ,i 1 26.Sorolja fel a beillesztett sokszögvonal számításának lépéseit!(5) 1-Tetszőlegesen (általában zérusnak választva) felvesszük a kezdő oldal ( ' k1 ) előzetes tájékozott irányértékét, majd a mérési eredményekkel szabad sokszögvonalként kiszámítjuk a sokszögpontok előzetes koordinátáit. A szabad sokszögvonal végpontjaiként megkapjuk a (V) előzetes ponthelyek koordinátáit. 2-Kiszámítjuk mind a (V) előzetes, mind a V tényleges végpont irányszögét és távolságát a K kezdőponttól. Az eredmények a (V) pontra : K (V ) és t K (V ) ( H ) , a V pontra KV és t KV H H szorzótényezőt. Ha a szabad (H ) sokszögvonalat szöggel elforgatjuk, majd m- szeresére nyújtjuk (zsugorítjuk), akkor a vonal (V) végpontja a tényleges V csatlakozó pontba kerül. 4-A sokszögvonal koordinátáinak kiszámításához -a szabad sokszögvonal minden oldalának előzetes
tájékozott irányértékét értékével megnöveljük (ügyelve arra, hogy a előjeles mennyiség) i',i 1 ( i',i 1 ) -a szabad sokszögvonal minden oldalának hosszát m-szeresére változtatjuk: 3-Kiszámítjuk a KV K (V ) elforgatási szöget és az m= ti ,i 1 (t i ,i 1 ) m 5-Kiszámítjuk a végleges oldalvetületeket, majd (folyamatos összegzéssel) a sokszögpontok koordinátáit. Utoljára és ellenőrzésül az ismert V végpont koordinátáit is kiszámítjuk A kiszámított koordináták a számítás élességén belül meg kell egyezzenek a végpont ismert koordinátáival. 11 27.Sokszögvonal csatlakozása magasponthoz (ábrával) , ha az egyetlen tájékozó irány segédpontról mérhető!(4) Ha az 1 sokszögpontból nem mérhető tájékozó irány ,de az S segédpontból mérhető, akkor az ábrán látható szöget számítjuk ki. A K1S háromszögben a KS=b oldal hosszát is
kiszámíthatjuk szinusztétellel, ezzel a KST háromszög ismerté válik, mert a t KT oldal hossza koordinátákból számítható. Szinusztétellel kiszámítjuk az szöget, ezután a keresett K törésszög két háromszög egy-egy külső szögének összegeként vagy különbségeként ,tehát az ismert négy belső szög összegeként vagy páronkénti különbségeként számítható ki 28.Mi a teendő, ha a magasponthoz csatlakozáskor egynél több tájékozó irányt mérünk?(2) Ez esetben K többféleképpen számítható. Ekkor az irányértékeket ,mint külpontos iránymérés eredményeit a K pontra központosítjuk. Ezután végezzük el a tájékozást és K törésszögnek a K' 1 tájékozott irányértéket tekintjük. 29.Sorolja fel a magassági csomópont számításának lépéseit!(5) A csomópont előzetes magasságának meghatározásakor a csomóponti rendszert magassági vonalakra bontjuk. A számítás irányát úgy vesszük fel,
hogy minden vonal végpontja a csomópont legyen . Ezután a kezdőpontok ismert magasságából kiindulva a magasságkülönbségek előzetes értékének összegzésével vonalanként kiszámítjuk a csomópont előzetes magasságát, amelyre annyi értéket kapunk ,ahány magassági vonal találkozik a csomópontban. A csomópont végleges magasságát az előzetes magasságok súlyozott számtani közepeként számítjuk A vonalanként megállapított súly fordítva arányos -szintezés esetén a szakaszhosszak összegével -trig. mag esetén a szakaszhosszak négyzetének összegével 12 30.Sorolja fel a hagyományos 2D ponthálózatban végzett GPS alappontsűrítés észlelési módszereit!(3) -statikus módszer -gyors statikus módszer -ismételt felkeresés módszere -félkinematikus módszer -ugróállásos 31.Mi a GPS-„szintezés” és mitől függ az elérhető pontosság?(5) Ha a pontosság növelése érdekében relatív magasságmeghatározást végzünk, tehát
legalább két vevővel észleljük egyidőben ugyanazokat a műholdakat, akkor az eredmény a két vevőantenna vonatkozási pontjának ellipszoid feletti magasságkülönbsége. Becslések szerint az ellipszoid feletti magasságadatok abszolút pontossága deciméter nagyságrendű, a relatív pontosság 10 km-es távolságra vonatkoztatva 1-2 cm. Ez utóbbi érték korlátozza a GPS-„szintezés” pontosságát. Részletes felmérés 32.Kisalappontok(mérési vonalpontok) koordinátáinak kiszámítása(3) A kisalappontok koordinátáinak kiszámításához mérőszalagos hosszméréssel végigmérjük azokat a vonalakat, amelyeken vonalpontként kisalappontot jelöltünk meg és folyamatos méretként leolvassuk a kisalappont(ok) helyzetét (távolságát a vonal egyik végpontjától ). A vonalat teljes hosszában végigmérjük, a végpontnál leolvasott (t AB ) távolságot, az ún. végméretet is feljegyezzük. 13 A és B pontok egyenesén az A ponttól t K
távolságban lévő K kisalappont koordinátái y K =y A + t K *sin AB és x K = x A + t K * cos AB A hosszméréskor kapott (t AB ) végméret általában nem egyezik meg a koordinátákból számított t AB távolsággal. y yA y yA r B sin AB B , (t AB ) t AB helyett cos AB xB x A t AB y K =y A + t K *r m és xB x A (t AB ) x K =x A + t K *m Ha az adott mérési vonalon több kisalappontot tűztek ki, akkor a pontok koordinátái általában folyamatos számítással: minden kisalappont koordinátáit a közvetlenül megelőző kisalappont koordinátáiból és a köztük lévő távolsággal arányos y és x koordináta- növekményből határozzuk meg. A koordináták folyamatos számításának képletei az i-edik kisalappontra: y i =y i-1 + t i-1 * r x i =x i-1 + t i-1,i * m 33.Derékszögű koordinátaméréssel bemért pontok koordinátáinak kiszámítása(5) Az A és B pontok egyenesére mint mérési vonalra
az a P és b P derékszögű méretekkel bemért P pont koordinátái. y P = y A + y = y A + a P * sin AB – b P cos AB x P = x A + x = x A + a P * cos AB + b P sin AB 14 Erre az esetre is érvényesek a mérési vonalpont koordinátáinak kiszámításánál említettek, tehát az abcissza-mérés záróhibájának eloszlására az yP = yA + aP * r – bP m xP = xA + aP * m + bP r Képletekkel számolunk , ahol r yB y A (a B ) m xB x A (a B ) és (a B ) a részletmérés végrehajtásakor a B végpontnál leolvasott végméret. 34.Ábra segítségével szemléltesse a tahimetria alapgondolatát, részletpontok koordinátáinak és magasságának kiszámítását!(5) 15 A tahimetria (magyarul: gyorsmérés ) elnevezés onnan származik, hogy a részletpontokat mind vízszintes, mind pedig magassági értelemben egyértelműen meghatározó geometriai adatokat kevés mérési munkával, tehát gyorsan állíthatjuk elő. t v t f *
sin z t f cos ' y P y A t v * sin AP ' AP AT AP ' x P x A t v * cos AB m = t f * cos z = t f sin M P = M A + h +m – l 35.Hogyan gyorsítható a távolság és a magasság kiszámítása redukáló diagramtahiméterrel végzet mérés esetén?(4) A redukáló tahiméterekkel végzett lécleolvasásokból a szokásos műveletekkel a ferde távolság helyett a vízszintesre redukált távolság számítható ki. Ilyen a diagram-tahiméter is A szálakon való leolvasás után egyből a redukált távolságot lehet kiszámítani: távmérőszálak. 2 (függőleges léctartás mellett) t v = c * cos + k l cos (vízszintes léctartás mellett) t v = c * cos + k l cos (vízszintesre redukált távolság) t v = t f * cos t v = k t (l t - l o ) m = c * sin + k l sin cos m = c * sin + k l sin m = t f * sin m = k m * (l m - l o ) - l o
(függőleges léctartás mellett) (vízszintes léctartás mellett) c: a távmérő összeadóállandója k: a távmérő szorzóállandója l: a lécleolvasások különbsége : az irányvonal magassági szöge 36.Elektronikus tahiméterrel végzett méréskor milyen redukciókat és javításokat kap a ferde távolság, a vízszintes és a magassági körleolvasás? A javított mennyiségekből milyen további mennyiségek számíthatók?(5) - A ferde távolság megjavítása az összeadó- és szorzóállandó, továbbá a meteorológiai javítás szorzótényezője előzetesen bevitt értékével. Egyes műszerek esetén az utóbbi szorzótényezőt is a számító egység számítja ki a műszerállásponton megmért hőmérséklet és légnyomás bevitele után. - A vízszintes és a magassági körleolvasás megjavítása a kollimációhiba és az indexhiba miatti javítás előzetesen bevitt, vagy külön mérési programmal meghatározott értékével történik.
Földgörbület refrakció hatása 16 37.Mit jelent a szabad álláspont-meghatározás programmal vezérelt méréskor?(4) Szabad álláspont- meghatározás, azaz a műszerálláspont ismeretlen koordinátáinak meghatározása ismert pontokra végzett szögmérés és távmérés eredményeiből. Ha több adatot mértünk, mint amennyi egyértelmű koordináta-számításhoz szükséges, akkor a számító egység kiegyenlíti a koordinátákat, azaz a kiszámított és kijelzett (rögzített) koordináták a lehető legkisebb mértékben térnek el az egyes meghatározások eredményétől. Az álláspont kiegyenlített koordinátáin kívül a számító egység távmérés esetén kiszámítja a felhasznált pontok kerethibájától függő méretarány tényező értékét, végül tájékozza a vízszintes kört, azaz kiszámítja a ( közép )tájékozási szöget, amelynek értékét hozzáadja a további vízszintes körleolvasásokhoz. Térképek, térképszerkesztés
38. Mit jelent a térkép alaki, helyzeti és tartalmi pontossága? (3) - Alaki pontosság: Az ábrázolt alakzat valódi alakja és térképi rajzolata azonosságának mértéke. - Helyzeti pontosság: Az ábrázolt alakzatok természetbeli és térképen ábrázolt helyzete azonosságának mértéke. - Tartalmi pontosság: (Tartalmi azonosság számszerűen nem jellemezhető!) Terepen végzett helyszíneléssel győződünk meg arról, hogy: - az ábrázolás szempontjából lényeges valamennyi valóságos alakzat megfelelője megtalálható-e a térképen; - a térképen ábrázolt valamennyi alakzat megfelelője megtalálható-e a valóságban; - a valóságban meglévő és a térképen ábrázolt alakzatok megfelelnek-e egymásnak; 39. Írja fel a koordinátákból kiszámítható terület számítási képletét! (3) n 2T = xi yi 1 yi 1 1 n vagy 2T = yi xi 1 xi 1 1 40. Melyek a mérőkamara belső tájékozási adatai és
melyek a külső adatok? (4) - Belső adatok: (3): A vetítési centrum 3 koordinátája képkoordináta-rendszerben. - Külső adatok (6): -A vetítési centrum 3 koordinátája geodéziai koordináta-rendszerben. -A képkoordináta rendszer 3 tengelyének állása a geodéziai koordinátarendszerben. 41. Miben különbözik az analóg és az analitikus kiértékelés? (2) - Analóg: Egy vetítő berendezés megfelelő beállítás után a képet egy sík felületére vetíti úgy, hogy a síkon a terep arányosan kisebbített megfelelője keletkezzen. - Analitikus: A képkoordinátákból számíthatók a tereppontok geodéziai koordinátái. 42. Milyen pont használható illesztőpontnak és mi az illesztőpontok szerepe? (2) Illesztőpont: Képen jól azonosítható, a kép sarokpontjaihoz közel eső pont. Fototérkép készítéséhez használjuk őket, mégpedig úgy, hogy ezeknek a kép- és geodéziai koordinátáik is ismertek. majd addig forgatjuk a képet az illesztőpontos
lapon, míg azok fedésbe nem kerülnek. 17 43. Mi okoz projektív torzulást és hogyan küszöbölhető ki? (4) A projektív torzulás képdőlés okozta torzulás. (A képsík és a tárgysík egymással nem párhuzamos.) A projektív torzulás megszüntetéséhez a felvétel kiértékelésékor a képalkotó (vetítési centrumon átmenő) sugárnyalábot vissza kell állítani. Ehhez ismernünk kell: - a mérőkamara 3 belső tájékozási adatát; - a vetítési centrum 3 koordinátáját a tárgy koordináta-rendszerében; - a képkoordináta-rendszer 3 tengelyének állását a geodéziai koordináta-rendszerben; A kép térbeli helyzetét a mérőkamara 3 belső tájékozási adata mellett a 6 külső tájékozási adat egyértelműen meghatározza. A 9 adat ismeretében a képalkotó sugárnyaláb visszaállítható. 44. Mi okoz perspektív torzulást és hogyan küszöbölhető ki? (4) A perspektív torzulás a domborzat okozta torzulás. A differenciális
képátalakítással kiküszöbölhető. A módszer alapgondolata, hogy bármely felület felbontható elemi felületdarabokra, amelyek külön-külön más síknak tekinthetők. A terepi vonaldarab számítógépen tárolt közepes magasságával küszöbölhető ki. 45. Hány tájékozási adat és hány illesztőpont szükséges a sztereo képpár teljes tájékozásához? (4) A két kép teljes tájékozásához összesen 6 belső és 12 külső adat szükséges. A belső adatokat ismerjük és felhasználjuk a vetítőkamarák beállításához. A 12 külső adatból a relatív tájékozás 5 szögadatát tapasztalati úton állapítjuk meg a térbeli modell előállításával. A fennmaradó 7 külső adatot a két vízszintes értelemben meghatározott illesztőpont (4 adat) és a 3 magassági értelemben meghatározott illesztőpont helyettesíti. 46. A térképek geometriai adatainak előállítása fotogrammetriával (táblázat) (4) Előállított adat Síkrajzi Terep
sík tagolt Síkrajzi és magassági tagolt Eljárás Eszköz Jellemző termék analóg analitikus analóg analitikus analóg analitikus optikai képátalakító monokomparátor differenciális képátalakító sztereokomparátor térkiértékelő berendezés analitikus plotter grafikus (fototérkép) digitális (adatállomány) grafikus (ortofotó) digitális (adatállomány) grafikus (szintvonalas térkép) digitális (térkép) 47. A globális távérzékelés jellemzői (felsorolás) (2) 1.) A felvételt készítő berendezés meghatározott pályán keringő műholdon van 2.) A felvétel nem csak a látható fény hullámhossz-tartományában készül 3.) A felvétel-készítés eredménye a képpontokba érkező sugárzási energia nagyságát kifejező számérték, a felvétel tehát digitális. 4.) A digitális felvétel rádiócsatornán jut a előfeldolgozó központba, majd onnan mágneses adathordozón kerül a felhasználókhoz. 18 48. A műholdas
távérzékelés előnyei (felsorolás) (2) 1.) Az adatgyűjtés rendkívül gyors 2.) Az adatgyűjtés szabályos időközönként ismétlődik 3.) Az adatrendszer nagy (országrésznyi) területre nézve is homogén 4.) A digitális adatok számítógéppel feldolgozhatók 49. A felbontás értelmezése a távérzékelésben (3) - Geometriai felbontás: Egy képelemnek (pixelnek) megfelelő valós négyzet alakú terület. - Spektrális felbontás: A színképnek hány sávjában gyűjt adatot. - Dinamikai felbontás: Hány árnyalatot különböztet meg a készülék. 50. Digitális képfeldolgozás: a statisztikai döntéselmélet tanulásos módszere (5) A vizsgált területen olyan kis területrészeket választunk ki, amelyeken az adott szempontok szerinti osztályba sorolás valamennyi osztálya előfordul. Ha feltételezzük, hogy az azonos osztályokba sorolt területek spektrális tulajdonságai is azonosak, akkor a felvétel nem ismert részletei is osztályokba
sorolhatók. A helyességet ellenőrizhetjük tesztterületek kiválasztásával Ezek osztályba sorolását ismerjük, de ezt csak az osztályba sorolás ellenőrzésére használjuk. Mindkét területről (tanuló, teszt) hitelesítő (referencia-) adatokat kell gyűjteni. A feldolgozó számítógép a tanulóterületek egyazon tematikus osztályba tartozó képelemére vonatkozóan előállítja a sugárzási energia eloszlásának sűrűségfüggvényét. Így a nem ismert részek sugárzásából kiadja, hogy tematikailag hova tartozik. Az osztályba sorolás minősítésének jellemzői: - Tévesztési táblázat: A tematikus hibák számszerű összege. helyes - Találati arány: 100% összes - Hibatérkép: Hibák területi eloszlása Kitűzések 51.Egyenes műszeres kitűzése egyenesbe intéssel és egyenesbe állítással (4 pont) 52. Koordinátákkal adott pontok derékszögű kitűzési méreteinek kiszámítása (5 pont) a p y p y a sin AB
x p xa cos AB b p y p y a cos AB x p xa sin AB (Ha több pont kitűzési méreteit számítjuk ugyanarra a kitűzési vonalra, akkor az i-edik pont kitűzési méretei: ai ai 1 yi 1,i sin AB xi 1,i cos AB bi bi 1 yi 1,i cos AB xi 1,i sin AB és y y y , x x x ) B A B A 53.Kitűzés poláris méretekkel (2 pont) A kitűzendő pont koordinátáinak ismeretében a pont közelében levő alapponthoz és az alappontból mérhető tájékozó ponthoz képest a pont helyét kijelölő vízszintes szöget és távolságot keressük. 19 54.Körív főpontjainak kitűzése, ha a törésponton műszerrel nem állhatunk fel (5 pont) Az érintőket metsző és a JK ponthoz közeli egyenes A' és B' metszéspontjairól végezzük el a kitűzést. Az "r" sugáron kívül az és szögeket és az
A'B' egyenes szakasz "e" hosszát is ismerjük, = + és = 180- segítségével az érintők t hossza t= r*tg(/2) is kiszámítható. A JE és JV pontokat a megfelelő egyenesen tűzzük ki az A' pontból, "a" távolság = t- (e/sin)*sin. A B pontból pedig b' = t- (e/sin)*sin távolság kimérésével. A JK pontot úgy tűzzük ki, hogy JE és JV pontokból T töréspont irányában a c=e*tg (/4) távolság kimérésével kitűzzük az A és B pontokat, a JK pont az AB=2c távolságot felezi. 55.Körív részletpontjai kitűzésének valamelyik módszere (3 pont) A JE pontbeli érintőből való kitűzésnek abban az esetében, amikor a részletpontok y tengelyre vonatkozó vetületei egymástól egyenlő távolságban vannak, és a kitűzendő részpontok távolsága n. y= y JV /n, ahol y JV = r*sin. A k-dik részletpont kitűzési méretei: y k k y és xk r r 2 y k2
Építmény- és talajmozgások vizsgálata. 56. Sorolja fel a geodéziai mozgásvizsgálat jellemzőit! (3) 1.A vizsgált tárgyat néhány kijelölt pontjával azonosítjuk A pontok számát úgy kell megválasztani , hogy az adott mérési módszerrel az összes pont helyzetének meghatározásához szükséges idő alatt a vizsgált tárgyat mozdulatlannak tekintsük. Kevés pontról lévén szó, azokat a várható elmozdulás , vagy alakváltozás szempontjából mértékadó helyeken kell kiválasztani. A vizsgált pontok kiválasztásának másik fontos szempontja, hogy fennmaradásuk és mérésre használhatóságuk a vizsgálat tejes idejére( akár évekig ) biztosítva legyen. 2.A vizsgálat módszerét úgy választjuk meg, hogy a vizsgálati pontok elmozdulása a kellőpontossággal kimutatható legyen. Ha ismerjük a várható elmozdulások irányát, akkor a pontok helyzetét csak ebben az irányban kell pontosan meghatározni. 3.A vizsgálati pontok helyzetét
általában mozdulatlannak tekintett viszonyítási pontokhoz képest határozzuk meg, bár az eredmények feldolgozásának vannak olyan módszerei is, amelyekkel a viszonyítási pontok egy részének esetleges elmozdulását is valószínűsíthetjük. 4.A vizsgálati pontok helyzetét a vizsgálat kezdetén végrehajtott alapméréssel rögzített állapothoz viszonyítjuk. 5.Rendkívül fontos az eredmények helyes értelmezése Elegendő megemlíteni, hogy egy pont vízszintes elmozdulása lehet eltolódás, de lehet az elmozdulás irányára merőleges tengely körüli elfordulás eredménye is. A gyakorlatban általában többféle mozgásvizsgálati módszer együttes vizsgálatával döntjük el, hogy milyen típusú mozgás következett be. 57.Sorolja fel a vízszintes elmozdulások meghatározásának módszereit!(4) A viszonyítási pontok helyét mozgásmentes területen kell kiválasztani és mozdulatlanságukat időről-időre ellenőrizni kell. A választott
mozgásvizsgálati módszertől függ, hogy a vizsgálati pontok csupán irányzott pontok vagy műszerálláspontok is legyenek. A vízszintes elmozdulások meghatározásának számos módszere ismert. - Egyenes mérés - Háromszögelés - Sokszögelés - Vetítés 20 58.Az ingás elektromos dőlésmérők működési elve(4) Magas karcsútoronyszerű építmények elmozdulástól független dőlése vetítéssel vagy elektromos dőlésmérők segítségével határozható meg. Az elektromos dőlésmérők közös jellemzője, hogy a mérendő dőléssel (hajlással) arányos villamos jelet állítanak elő, amelyet megmérve a műszer hitelesítési adatainak felhasználásával, tapasztalati úton következtethetünk a dőlés ( hajlás) megváltozására. A ingás dőlésmérők működésének alapja, hogy a fizikai inga tömegközéppontjába a felfüggesztési pont függőlegesben van, ha az ingára csupán a nehézségi erő hat. Ez a fizikai inga ferromágneses anyagból
készült rúd , amely két összekapcsolt induktív tekercs között vasmagként van felfüggesztve. A tekercset váltóáram táplálja Az érzékenység fokozása érdekében Wheaston-hídba kötik. A vasmag kitérése esetén változik a tekercs induktivitása amely az elmozdulással arányos. A műszer az elmozdulással arányos áramot mér, mely a tapasztalati beosztásból leolvasható. A nullára kalibrálást egy változtatható ellenállás segítségével végezzük. 59.Süllyedésmérések tervezése: a műszerállások számának meghatározása(5) A tervezés a vizsgálati pontok helyének kiválasztásával kezdődik. Lényeges, hogy a vizsgálati pontokat egy-egy szerkezeti elemen a várható legnagyobb függőleges elmozdulások helyén jelöljük ki. A szomszédos vizsgálati pontok magasságkülönbsége minél kisebb legyen Lehetőség szerint biztosítani kell a pontok tartós fennmaradását, hogy az épülő műtárgy süllyedésmérését az üzemelés idején
is ugyanazokra a jelekre végezhessük. Optikai szintezést feltételezve a pontok helyét úgy kell kiválasztani, hogy a pontokat szintezési vonal(ak)ba foglalhassuk, ne legyen szükség kötőpontokra, a szintezőműszert a szomszédos vizsgálati pontoktól egyenlő és legfeljebb 25m-es távolságban fel lehessen állítani ( a műszerálláspontok tervezett helyét is meg kell jelölni ). A mozdulatlannak tekintett viszonyítási pontokat gyors ellenőrzésük érdekében ún. fürtökben kell telepíteni, azaz legalább három pontot kell úgy elhelyezni, hogy a pontokra helyezett szintezőléc egyetlen műszerállásból és legfeljebb 25 m-es műszer-léc távolságból leolvasható legyen. Egy-egy műtárgy süllyedésvizsgálatához legalább két fürtöt kell kialakítani 60.A mozgásvizsgálat eredményeinek közlése(5) A mozgásvizsgálat eredményeinek felhasználója rendszerint folyamatos tájékozást igényel a bekövetkezett elmozdulásokról, ezért az
eredményeket minden vizsgálati mérést követően közölni kell a felhasználóval. Az eredményképzés legegyszerűbb módja olyan táblázat összeállítása, amelynek két rovatában az elmozdulás értéke szerepel egyrészt a megelőző vizsgálati méréshez, másrészt a kezdeti állapotot rögzítő alapméréshez képest. Ha a várható elmozdulások iránya ismert, akkor a pontok vízszintes elmozdulásának csak az adott irányba eső összetevőjét szokás megadni. Az elmozdulás folyamatának szemléltetésére egy-egy táblázatos kimutatás a megelőző összes vizsgálati mérésből meghatározott elmozdulásértéket is tartalmazhatja. A grafikus ábrázolás általában szemléletesebb a táblázatos adatoknál. A vízszintes elmozdulásokat az elmozdulás irányát is megmutató vektorokkal ábrázoljuk. Süllyedésmérés grafikus eredményközlésekor az egyes vizsgálati pontok süllyedését az eltelt idő függvényében szokás ábrázolni. 21
 I. (Szent) László 1048-ben született Lengyelországban. [2]Apja I. Béla magyar király, anyja Richeza (Adelheid) lengyel hercegnő. Szent Lászlónak egy gyermeke született: Piroska (Priske), aki később bizánci császárné lett. [2]Fiatalkorában testvére, I. Géza oldalán részt vett a Salamon király elleni küzdelmekben. E harcok eredményeként 1074-ben, amikor I. Géza megszerezte
I. (Szent) László 1048-ben született Lengyelországban. [2]Apja I. Béla magyar király, anyja Richeza (Adelheid) lengyel hercegnő. Szent Lászlónak egy gyermeke született: Piroska (Priske), aki később bizánci császárné lett. [2]Fiatalkorában testvére, I. Géza oldalán részt vett a Salamon király elleni küzdelmekben. E harcok eredményeként 1074-ben, amikor I. Géza megszerezte